机械臂的控制系统设计初探
2020-09-22张水龙
张水龙
(中冶华天工程技术有限公司,江苏 南京 210019)
在钢铁冶金领域,存在着多种高温高压甚至有毒气体的场合,随着国家对智能制造2025 的整体要求,也要求在钢铁冶金工业生产过程中大规模使用机械人来替代危险场所劳动工人,因此,研究机械臂控制系统设计也具有更直接应用的实际意义。机器人在目前发展过程中,其智能化标准更高。特别是随着机器人研究领域的深入探讨,对机器人的仿真技术、代码模块化等提出了较高要求。尤其是机械臂控制系统的设计,总体上更加优化,值得我们有效学习。
1 机械臂功能
机械臂的功能主要表现为五个方面:第一,正常的旋转功能。在对机械臂的各个零部件进行检测的过程中,一定要确保机械臂是能够旋转的,这样照相机才能更合理地移到相对应的位置上,且有效检测该位置是否已经完成了零件的安装,保证拍摄工作的积极执行,也能更为合理地明确具体情况。第二,示教功能。该功能只需要工人利用触摸屏就能轻松完成,为了使机械臂能够进行运动,只要按摸一次触摸屏,就能运动一下,这样三个点的检测工作都能积极完成。第三,在现功能。在触摸屏上,触摸自动运行按钮,机械臂就能有效运动,且一次性地完成零件检测工作和拍照工作。第四,检测功能。在机械臂实际运动的时候,且到达各个零件位置,就能进行有效的检测工作。并且,在机械臂前端安装的照相机,就能发挥自己的拍照和照片信息送回现象。第五,报警功能。在实际检测过程中,如果发展在零部件安装的位置未存在零件,期间,系统就能主动发出报警信息。如果检测期间发现已经安装了零件,则不会发出报警信息,直接会进入下一个检测工作中。
2 机械臂的结构
机械臂中的人手部在实际工作中,如果能在各个空间和各个位置上形成各种姿态,机器人一定要能够达到6个自由度。比如,在写字的时候,只需要将笔夹紧,不能松开,这时候,可以将末端的6个关节去掉。为了能在分析中提供更大方便,可以首先使用matlab 对机械臂的结构进行建模。具体的机械臂建模工作中,需要使用四个参数,其中,主要的参数内容包括连杆长度、连杆扭角、两连杆距离和两连杆的夹角。其中,连杆的长度,主要是在连杆上关节轴线之间存在的最小距离。对于连杆扭角,主要是两个关节轴线之间的夹角。对于杵距离,是两个关节轴上,两个法线之间的距离。对于两连杆的夹角,是在关节轴上,两个法线之间的夹角。对于机械臂的结构设计,为了保证机械臂关节发挥模块化和简单化效果,在实际设计中,可以利用电机与减速器之间连接,形成减速器和臂体连接结构。这种连接方式中间需要的零件比较少,所以,变量和回程间隙也比较小,整个结构刚度更高。在对关键部件进行选型期间,首先,要予以关节负载的估算,因为各个关节动态参数为元件选择、关节传动零件选择中最主要的部分,利用机器人动力学的有关知识,实现各个动力参数的计算。一般情况下,主要使用静力学方法和动力学方法,特别是速度较低的机械,运行期间,因为惯性带来的动载荷比较小,所以,更适合使用静力学方法。相反,如果是运行速度较高的机械,由于动载荷比较大,则可以给予静载荷和动载荷的分析,保证动力学计算结果更合理。
3 确定机械臂的总方案
第一,详细确定出机械系统方案。在对机械臂实际设计的时候,可以使用步进驱动器、步进电机。这种方式下,发现4 自由度机械臂能够此次条件,其组成部分就是四个步进驱动器和四个步进电机。不仅如此,4 自由度机械臂也包括三个旋转自由度和一个移动自由度。
第二,对电气控制系统的设计。为了对四个步进电机的实际运动情况进行控制,使用可编程控制输出脉冲,保证触摸屏和可编程控制器之间的相互连接。因为要对机械臂的运动进行控制,主要是利用触摸屏来实现。因为机械臂的使用功能是对各个零件的缺失情况详细检测,如果发现检测完成后,其结果未有明显的缺失情况,就能自动进行下一个位置的检测。如果发现该位置出现明显的零部件检测现象,系统则会发出警报,且工人在期间能够补上已经缺失的零件。不仅如此,还确定了机械臂的实际运动情况,利用步进驱动器和步进电机,都能有效实现,步进驱动器和步进电机之间是相互联系的,为了保证步进电机的驱动,使用可编程控制器能够有效实现,并且,对于可编程控制器,使用中,内部的输入端和触摸屏之间也是相互联系的,利用触摸屏上的按钮,能实现可编程控制器的输入,也能使可编程控制器进行输出,以促使机械臂整体运动情况的积极控制。
在对机械臂系统进行设计期间,基于STM32 微处理器,利用STM32 强大的运算能力和处理能力,结合单CPU 集中控制方式,能够满足具体要求。如图1 所示,是机械臂控制系统使用了CPU 集中控制方式,期间,利用计算机来发送指令,进行运动轨迹的规划和整个系统管理操作等工作。计算机在J-Link 仿真器程序下,下载STM32 微处理器,且对控制系统发出指令,随后,STM32 微处理器会输出PWM 波,保证机械臂的各个关节都能按照一定的运动轨迹和位置等进行转动,也能保证相关搬运任务的积极完成。
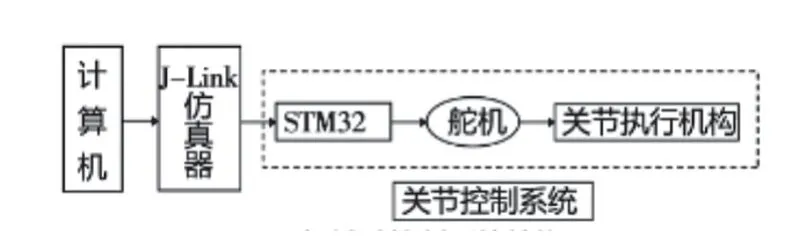
图1 机械臂控制系统结构图
4 机械系统设计中的器件选择
4.1 选择步进电机
为了促使机械臂的有效运行,步进电动机的使用是非常重要的。所以,在实际选择过程中,要加强对步进电机型号的分析。比如,kinco 步进电机的利用,能够按照一定的流程图,实现扭矩的计算,促使步进电机型号的积极选择,其中,根据计算公式,对扭矩进行计算。
4.2 选择步进驱动器
在步进电动机选择完成后,为了能够与可编程控制器相互链接,可以在plc 和步进电机之间增加步进驱动器。要保证步进电机和步进驱动器的选择,需要结合相关的选型手册,给予步进驱动器型号的选择。比如,先结合选型表,再促使步进电机的选择。其中,主要的步进驱动器型号为2CM880,2CM545。
4.3 机械运动设计
4.3.1 确认4 自由度机械臂的机械运动方式
机械臂的实际运动,要能够满足三种条件。总体上可以对4 自由度机械臂进行有效划分,形成三个旋转运动和一个移动运动。对于三个旋转运动中使用的电机,主要对A 轴、B 轴和C 轴的正反转进行控制。对于一个移动运动,主要对轴的升降进行控制。并且,还需要将照相机放在轴的前端位置,保证在检测过程中能够进行拍照,也能更为详细地判断出各个零部件时候未有效安装。
4.3.2 三维软件的使用
利用Solidworks 软件,能够对机械臂的零件图进行绘制。其中,要先对机械臂的零部件图进行绘制,实际绘制的时候,首先,双击三维绘图软件Solidworks 图图标,将该软件打开。然后,新建文件,选择其中的零件绘制。期间可以给予草图的绘制,对零件草图进行绘制,加强零件绘制工作的积极选择,最后,退出草图。不仅如此,还需要给予拉伸和旋转,增加对材料的编制,在完成零件图绘制工作中,需要对其另存为,保证在进行装配的时候方便添加。
4.3.3 使用Solidworks 实现零件装配
具体的执行步骤如下:(1)将Solidworks 三维绘图软件打开。(2)进行文件新建,并对装配体进行选择。(3)进行装配体,点击对文件夹浏览,对刚进行的零件另保存,但是,这些文件最好放在统一的文件夹中,这样所有的零件也能够方便添加。(4)开始对各个零件进行装配,保证能达到一个整体。(5)详细分析各个部分,研究具体哪个部分是动的,哪个部分不是动的,尤其在配合的时候,更应该注意到。(6)对于4 自由度机械臂,在进行装配的时候,主要将其分为四个部分,首先,要从底座开始进行装配;然后,是三个旋转副;最后,装配移动副。
4.3.4 使用Solidworks 软件进行仿真
Solidworks三维仿真软件在使用过程中,具体的步骤为,首先,将Solidworks 三维绘图软件打开,然后,打开菜单栏,并在其中执行文件的打开命令,同时,也要将装配体打开。最后,给予仿真设置。
5 结语
基于以上的分析和探究,发现机械臂在工厂中的利用不仅能使工厂达到现代化建设,也能使工厂在积极生产中获得更高经济效益。所以,分析机械臂控制系统设计,保证能投入更多的工业机器人,以促使应用价值的提升和获取。
