植保无人机飞行控制精度测量方法及不确定度分析
2020-09-21苏仁忠杨宏伟
马 帅,苏仁忠,杨宏伟
(1.中国电子科技集团公司第五十四研究所,河北 石家庄050081; 2.湖北省农业机械化技术推广总站,湖北 武汉430017)
0 引言
伴随近几年国家无人机技术和产业的蓬勃发展,尤其在农业农村部农机购置补贴政策和地方配套政策的引导下,植保无人机得到快速推广和广泛应用[1-2]。根据目前的应用趋势,植保无人机已经胜任了喷洒农药、叶面施肥、辅助授粉、农田信息采集和辅助决策规划等作业,广泛应用于稻田、旱地、高山茶园、烟草地、防护林和经济林等各类场景。相比传统农业机械作业,植保无人机表现出作业效率高、劳动强度低、适应性广和对人体健康危害小等明显优势。农业物联网的快速发展在一定程度上促进了植保无人机的智能化融合应用,部分区域已具备无人化操纵、精准精细作业、智能管理和智慧农场的实现条件。
飞行质量是影响植保无人机作业性能和用户体验的关键指标。植保无人机系统一般由飞行平台、飞控系统、导航系统、动力系统、遥控站及通信链路、任务载荷(喷雾系统)和其他传感器部件组成[3]。表征其飞行质量的指标主要有悬停精度、飞行高度及稳定性、速度性能、飞行控制精度、水平加减速性能和姿态精度等。这些指标无一不是植保无人机导航系统、飞控系统、测控系统和动力系统等综合作用的结果,任何一个分系统的性能都会影响到其整体飞行状态,不同于分系统指标的检测,整机飞行性能的检测是重点也是难点所在[4]。
本文选取植保无人机最典型的飞行性能指标“轨迹控制精度”为研究对象,介绍一种规范、科学的检测方法,同时进行测量值不确定度分析,以提高测量数据的可靠性,为质量鉴定和检验检测提供依据。
1 测量方法
目前常用的飞行性能检测方法有直接观测法、雷达定位法和高速相机测定法等,但这些方法尚存在操作复杂、环境干扰大、结果精度低和实时性差等问题[5-6]。最规范、成熟的检测方法是通过挂载高精度轨迹测量设备,实时获取无人机飞行的轨迹数据,然后借助软件评估植保无人机的飞行性能。这种方法测量误差较小且不易受环境影响,测量结果的准确性主要由无人机轨迹测量设备精度决定,而轨迹测量设备本身的精度是通过计量校准保证的。由此可见,通过飞机精度测量值的不确定度分析,可以提高测量值的可靠性,为其实际应用提供参考。
轨迹测量设备组成如图1所示,在不影响无人机飞行性能的前提下,将高精度轨迹采集设备挂载于被测无人机上,准确、稳定地采集无人机的飞行状态参数(如时间、位置、速度、加速度和姿态等),实现飞行状态的实时监控。利用评估软件对采集的状态参数进行分析处理,量化评估其飞行性能,如图2所示。
在试验场地内预设飞行航线,在额定负载起飞条件下,控制无人机以高度5 m和速度4 ms,进行距离>1000 m的航线飞行。如图3所示,飞行过程中,无人机轨迹采集装置使用RS232串口通信协议,机载端通讯4G-DTU模块将采集的飞行数据进行读取和发送,地面端通讯模块将接收的飞行数据进行提取、处理,在软件中绘制实时飞行轨迹,并与预设的飞行数据在相同时间系统、相同坐标系下进行位置坐标比对,并统计偏差结果。
2 测量不确定度分析
2.1建立不确定度模型
依据测试方法,飞行控制精度(水平方向)的数学模型为
式中ψi——实际采样点到预设飞行轨迹的水平距离,即飞行控制精度
n——取样的观测点数
a、b、c——预设轨迹ax+by+c=0中的参数,可由起始和终止点计算而得[7]
2.2标准不确定度
(1)测量重复性引入的测量不确定度分量uψ1。
被测样品型号为广州某公司的植保无人机,选取一段平稳飞行的直线航线重复测量10次飞行控制精度,则不确定度分量主要源于测量重复性。考虑到实际测试中由于受现场风速风向、当地气压和电磁干扰等自然条件影响,无人机实际的飞行轨迹与预设飞行轨迹会存在一定程度的不确定度。该不确定度受瞬时风速风向不确定度、各地气压不确定度、电磁影响不确定度和求解过程不确定度等综合影响,所以采用A类方法进行评定[8]。
由表1计算飞行控制精度的平均值
标准差

≈0.014 2 m
因此
自由度
v1=n-1=10-1=9
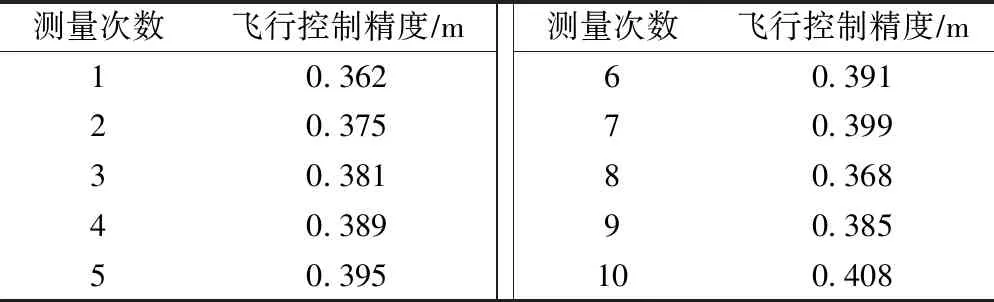
表1 飞行控制精度测量值
(2)采集设备本身引入的测量不确定度分量uψ2。
测试所用的无人机轨迹测量设备输出的原始轨迹数据中,因量化和精度截断等原因,引入的动态位置测量的最大误差为0.087 m(校准证书),其在该误差区间内符合均匀分布,取半宽区间,则由计算可得B类不确定度[9]。
uψ2的估计很可靠,故自由度v2=∞。
(3)安装误差引入的测量不确定度分量uψ3。
通用挂载工装进行精确测量,但由于受机械结构、杆臂值测量、惯导对准和固定偏差测量(测量设备与无人机中心间的距离)等因素影响,安装中存在对中误差。对中准确度取0.08 m,采用B类方法进行评定,取半宽区间,并以均匀分布估计。
uψ3的估计很可靠,故自由度v3=∞。
2.3合成标准不确定度
以上不确定度分量彼此独立,互不相关,因此

2.4扩展标准不确定度
取k=2,于是扩展不确定度为
U=k·uc=2×0.034=0.068 m
2.5测量不确定度报告
本样品的飞行控制精度测量结果:被测量的估计值φ=0.385 3 m,不确定度U=0.068 m,k=2。
3 结束语
对于植保无人机飞行控制精度的测量指标,本文提出了一种使用无人机轨迹测量设备直接采集轨迹数据,通过计算得到飞行精度的方法。对该方法中引入的测量误差进行了不确定度分析及评估,从评估结果看,主要误差来源于测量重复性,即环境的随机性干扰,但该不确定度引入的误差在合理范围内,可以满足精准农业应用对植保无人机质量检验检测的需求[10]。
