基于SCOOT系统的公交信号优先控制技术研究
2020-09-18范永强
范永强
(北京市公安局公安交通管理局,北京 100037 )
2006-12-18北京市交通委、发改委、规划委、财政局、公安局联合制定了《关于优先发展公共交通的意见》。北京市作为交通运输部批准的国家公交都市建设示范城市,采取一系列公共交通优先发展措施。从交通信号控制层面,北京市交管局自2009年开始先后建设三期公交信号优先系统工程,公交优先信号控制系统现有控制点共计354处,主要分布在中关村大街、阜外大街等17条主干道,线路总长度168.8 km,涉及公交线路100余条,公交车辆约3 000辆。
在上述公交信号优先控制点位中,北京市二环及周边范围的控制点位均接入核心区的SCOOT(Split Cycle Offset Optimizing Technique)信号控制系统,其优先控制策略由SCOOT系统进行实施。
1 公交信号优先模式分类
公交信号优先按照优先对象不同可以分为道路优先和信号优先。
道路优先又分为公交信号优先道和公交专用道。公交信号优先道是指公交车辆在一定的时间内享有道路的优先使用权,而其他情况下不具备优先的权力,与其他道路仅是交通标志的区别,不具备物理隔离的手段;公交专用道是指公交车辆始终独自享有道路的使用权,通常与其他车道采用物理隔离方式,并在法规上进行严格的规定,确保公交车辆的独享权力。
信号优先是通过对交叉口交通信号控制策略的优化,对公交车辆进行倾斜性的信号分配,提高公交车辆在交叉口的通行效率,确保公交车辆的优先通行权。信号优先分为系统优先控制和本地优先控制两种模式。
系统优先控制模式下的公交信号优先是指控制范围内的路口在运行中心计算机系统控制模式的基础上,系统接收公交信号优先请求信息,根据系统的综合信息数据进行配时优化运算,向路口信号机发送控制命令或执行方案。本地优先控制模式是指路口信号机不与系统相连,在接收到公交信号优先请求信息后,根据自身的优先程序执行优先控制,称为本地公交信号优先控制模式。
公交信号优先按照控制策略可分为实时优先策略、主动优先策略和被动优先策略。
Bertini R L[1]对上述三种优先策略进行了界定。实时优化策略是基于实时检测数据提供信号优先的同时,以某一指标为目标优化方案;主动优先策略为检测到的特定车辆提供优先,包括相位延长、提前激活相位、公交车辆专用相位等多种方法;被动优先策略是针对离线方案进行优化,不考虑交叉口是否有公交车辆到达,同时不需要车辆检测/优先申请生成系统。
在实时优先控制方面,Furth P G[2]研究了公交车辆在交叉口的有条件优先方法,并在荷兰进行应用实施,结果显示,在绝对优先条件下社会车辆延误成倍增长,但在有条件优先下却没有明显变化;LIU Hong-chao[3]将动态交通信号优化算法应用于公交信号优先,实时检测公交车辆在路口的到达时间和驶离时间,不再为一个常量,而是与时间相关的变量,公交信号优先请求根据实际交通流条件赋予适当权值。张鹏[4]以哈尔滨市红旗大街-东直路交叉口为研究对象,研究单点交叉口实施公交优先的控制方案,详细描述配时方法,提高公交车辆的通行效率。窦慧丽[5]研究了考虑车辆所承载的乘客数量最大优化目标的单点交叉口实施公交优先的控制策略,建立车道信号协同配置模型,并通过MATLAB软件对模型进行仿真分析,结果表明所建模型可以提高车辆通行能力。徐行军[6]在分析城市交通拥堵原因的基础上研究了公交优先实施相关技术,提出公交优先规划和信号控制的相关技术方案。初彦龙[7]以SCOOT系统为依托,研究实施公交优先的原理和公交优先后的信号控制恢复策略。陈智[8]同样以北京市SCOOT控制范围内的路口为例,描述了UTC-SCOOT系统实施公交优先相关的技术方案。Francisco[9]以SCOOT系统在巴西的应用情况为对象,研究公交优先的实时自适应控制策略,针对中高流量时段的交通状态进行公交优先控制,并以车辆延误时间和停车次数为指标对信号控制进行评价。崔笑川[10]以交叉口人均延误最小为目标,考虑公交专用道影响因素,利用延误偏差优度指数建立信号配时优化模型,对所建模型进行求解,并提出固定配时的公交优先控制方案。邓瑞萍[11]以交叉口所有人总延误最小为目标,引入效益指数PI,以信号交叉口优先相位获得的效益与非优先相位损失效益的差值来衡量整体效益,使得每一次采取的公交优先策略都能提高信号交叉口的整体效益。高歌[12]从BRT实施层面研究BRT系统控制策略和公交优先信号控制的实现。
从公交优先发展和规划方面,徐华兵[13]从公交优先发展的一系列制度和运营方面阐述公交优先当前发展存在的瓶颈,并提出相关的解决措施。陈团宁[14]分析城市公共交通优先中存在的问题并提出一些改善措施和建议。冉伟[15]分析国内城市存在交通拥堵的原因,并提出发展公共交通和公交优先的策略方案。徐以群[16]从政策、法规和体制等层面以杭州市为例阐述优先发展城市公共交通的措施。
2 公交信号优先实施技术方案
2.1 无源车辆检测
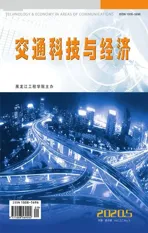
无源车辆检测技术将公交车辆登记注册信息进行加密,生成电子标识个性信息,信息写入电子标识,同时将电子标识的序列号信息通过访问接口上传至后台数据平台。无源车辆检测系统结构如图1所示。在路口龙门架或者立杆上安装主机,即电子标识读卡器设备,读卡器设备读取范围约100~150 m,当读卡器读取到公交车辆电子标识信息后,将信息传输至路口交通信号机,由交通信号机传输至SCOOT系统,同时将车辆信息及请求信息等数据传输至公交优先系统平台。公交优先系统和SCOOT系统控制原理如图2所示。
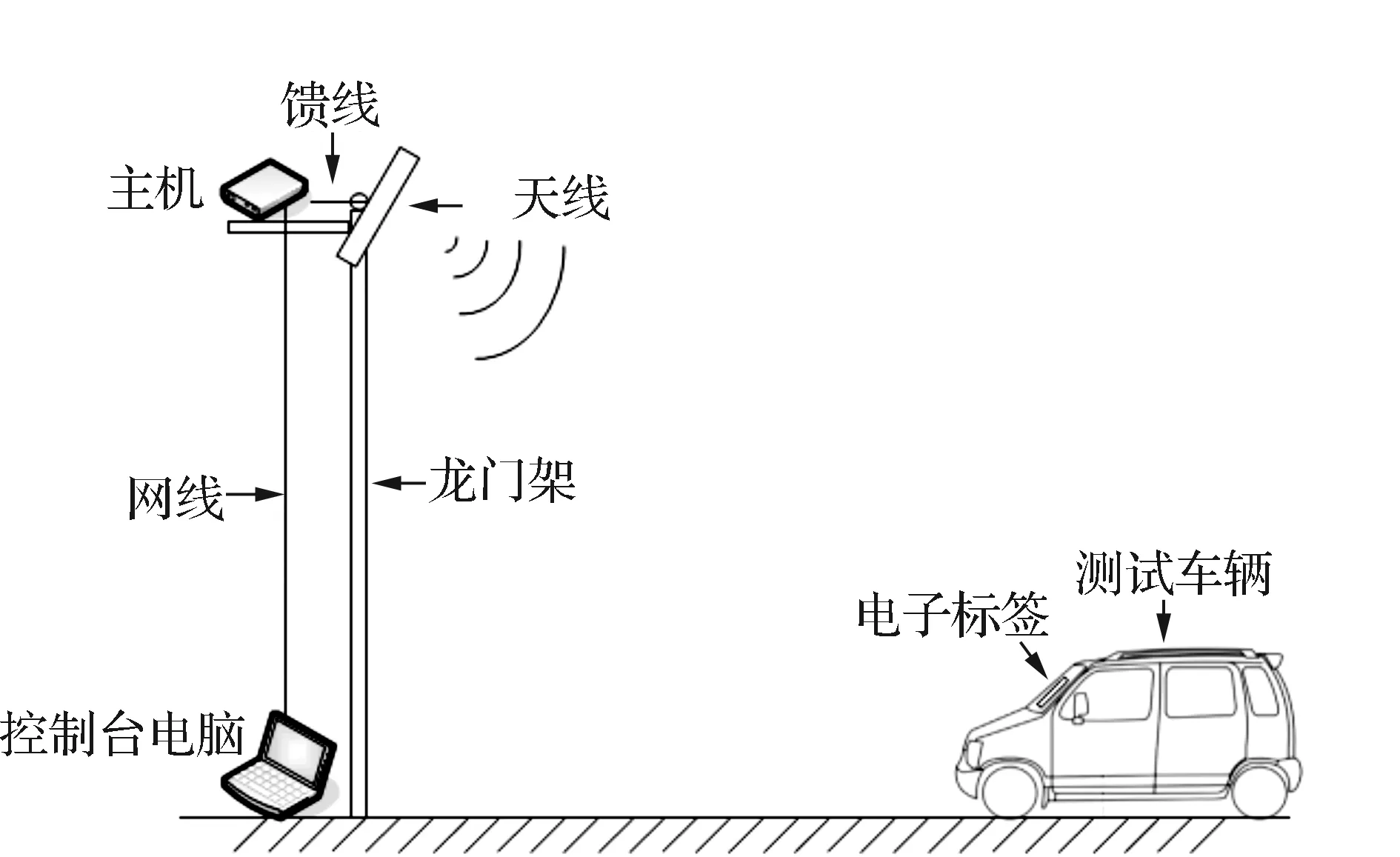
图1 无源车辆检测系统示意图

图2 系统结构图
2.2 基于SCOOT系统的公交信号优先实施方案2.2.1 系统原理及结构
根据系统对公交信号优先系统的功能需求,设计公交信号优先系统结构如图3所示。
图3 SCOOT系统公交信号优先原理
由于SCOOT控制的T系列信号机具体的配时方案均有中心系统来计算,中心系统把配时方案下发至信号机,信号机只是执行中心系统的命令。所以由T系列信号机控制的路口采取公交信号优先时,公交信号优先方案也是由中心SCOOT系统来计算并下发给下端信号机执行的。信号机只是接受公交检测信息并实时传输至中心系统。
2.2.2 技术实现方案
除了交通调查、交通控制设计等基本交通工程设计以外,要配置一系列的技术参数。
2.2.2.1 下端信号机配置设计
1)SCOOT系统控制范围内的信号机均为西门子ST800和MCU-6型号,此处以ST800信号机为例说明下端信号机配置所需设置参数的内容及方法。
在下端信号机中接入公交信号优先检测器,并在相应的I/O口中配置公交信号优先检测器传输信号BD位,每个路口最多可以接入4个公交信号优先信号。由于每台信号机设备提供了16路输入端口,且实际控制中接入了非公交车辆检测器,为避免同道路非公交车辆检测器的输入混淆,公交优先检测器定义在最后位置的端口上,通常每个方向定义1位,在15、16端口位置定义BP1和BP2检测器输入。
2)使用特殊条件语句实现公交信号优先传输信号和控制/返回字之间的赋值关系。
NOT(BP1)=BD1,
NOT(BP2)=BD2.
由于ST800采用的是负逻辑,所以赋值语句要用NOT语句进行转换。
3)在控制/返回字中添加相应的公交信号优先检测信号回传信息。
在公交优先信号控制时,为了方便直观地观测公交车辆的需求信息,在信号机配置中进行BD1和BD2两个参数的定义,通常定义在UTC控制和回复数据格式中回复字的最后两位。
2.2.2.2 中心数据库配置
1)在中心系统中根据检测器数量,新增一种路口("J")返回字格式,定义BD1-BD4位,并指定相关路口采用该格式的控制返回字格式。
在实施公交优先的路口数据库中设置带BD位的回传字格式后,路口的DIPM监视界面上会明确显示BD位回传内容,回传内容为“1”时表示该回传位有公交车辆优先需求,回传内容为“0”时表示无公交车辆优先需求。
2)在SCOOT数据库中,Link层上建立实施公交信号优先方向的对应检测器信息。
在实施公交优先的路口SCOOT数据中的“SCOOT LINK DATA”界面中需要进行相关的公交车辆检测器配置,包括“BUS Equipment SCN”和“BUS Detector Number”,分别表示该LINK所对应的路口编号和公交车辆检测器数量。
在上下端分别实施上述项目后,在中心既可观测到公交信号优先检测信号信息。如果想利用这些信息达到公交信号优先控制的目的,还需要进行一些控制参数的调试。
2.2.2.3 系统参数调试
控制参数的配置包括BERL、BJNY、 BPAN、BESn、BSEL、BPFL、BOFF等。
这些系统参数限定了公交信号优先的实施方式、旅行时间、优先条件、优先后补偿等。
具体参数配置如表1所示。

表1 系统参数配置表
当对公交车辆实施信号优先后,通常在优先后的下一个周期系统会采取信号补偿,补偿措施分为阶段扩展和阶段重入两种方式后的补偿模式,其补偿配置参数如表2所示。

表2 公交优先后的补偿参数配置表
除此之外,还要在路口进行STOC、JNYT、QCMQ、SLAG和ELAG等系统参数校验、调试。
3 应用实例
基于无源检测模式的公交优先技术已经在阜外大街进行实施,涉及12处路口,其中5处路口在SCOOT系统控制范围内,通过SCOOT系统和公交优先系统平台的数据统计对公交优先实施前后进行对比分析。
SCOOT系统对公交信号优先数据统计有3种数据,分别为B11、B24 和B27。其中B11信息提示公交信号优先开始,并说明优先方式。B24信息提示在某种优先方式下的优先阶段,包括SCOOT阶段和UTC阶段。B27信息提示公交信号优先结束、优先时间、优先方式。
系统响应数据以系统消息的方式显示公交信号优先响应信息,如:
Mess B01 N*
Type: Node
Category: Detail
Description: Bus priority overriding SCOOT
Parameters: Override Override (=no, 1=yes)
Choice UTC stages (bit pattern:0=extension, >0=recall)
当路口根据系统判断进入公交优先控制模式时,系统DIPM监视界面会显示“SCOOT Bus Override”和“BUS ACTIVE=1”标志,意味着该路口当前正在进行公交优先控制。
根据公交优先系统平台软件所统计的实施公交优先前后公交车辆行程时间的对比分析,描述公交优先实施后的效果。公交优先实施前后阜外大街5个路口及路段公交车辆的行程时间统计如表3所示,前后效果对比数据如图4、图5所示。

表3 公交车辆的行程时间统计表 s

图4 早晚高峰时段平均行程时间对比图

图5 平峰时段平均行程时间对比图
从表1和图4、图5对比可知,阜外大街路段实施公交优先后,无论是早晚高峰时段还是平峰时段,公交车辆的行程时间均出现一定程度的减少。早晚高峰时段的平均行程时间由实施前的210 s降低到186 s,减少23 s,较公交优先实施前行程时间节省10.9%;平峰时段的平均行程时间由实施前的184 s降低到151 s,减少33 s,较公交优先实施前行程时间节省17.9%。
4 结束语
通过无源车辆检测技术可准确地检测到公交车辆信息,并且通过读卡器处理模块能把相关的车辆信息和请求信息传输至公交优先系统平台,同时优先请求信息通过信号机将相关数据传输至SCOOT系统,SCOOT系统根据当前交通信号控制状态进行优化处理,将优化后的控制方案下发至交通信号机进行信号控制,同时将相关的优化数据通过系统接口传输至公交优先系统平台。
通过实例分析不难看出,基于无源车辆检测技术的SCOOT系统公交优先控制可有效对估计车辆实施优先,通过数据分析表明,公交优先实施后的公交车辆的路段行程时间明显减少,降幅达10%~20%。公交优先的有效实施可改善公众出行方式,有效减缓交通拥堵。