高精度室外定位确定室内初始点
2020-09-18席超蔡劲杨博沈文波蔡成林
席超,蔡劲, 杨博, 沈文波, 蔡成林
(1.航天恒星科技有限公司,北京100086;2.桂林电子科技大学 信息通信学院,广西 桂林 541004;3.湘潭大学,湖南 湘潭 411105)
0 引 言
室内外无缝定位及导航已成为导航位置的核心问题,对智慧城市、智慧旅游、智能机器人、个人导航等多领域意义重大,现在人们70%以上的时间在室内度过,随着城市化和城镇化的不断发展,室内外无缝定位作为“最后一千米”门户与突破口具有非常大的意义.
本文的目的就是通过高精度室外定位确定室内初始点.固定整周模糊度的LAMBDA算法是能否获得准确载波相位,从而计算得到高精度定位结果的关键.为了解决精密星历不实时,实时星历不精密的问题,这里介绍了实时修正广播星历的SSR改正信息的方法.在最后得到三个待测点位地心地固坐标下的结果后使用三星定位模型得出最终的室内定位初始点.从而使室内外无缝定位真正意义上实现“无缝”.
1 室外定位的相关方法介绍
1.1 GNSS多模融合导航技术
自从美国研发出GPS以及随后俄罗斯研制出GLONASS之后,各国对于导航的认识及战略意义的重视上升到了更高的层面,在此之后欧盟和中国也相继建设自主导航定位系统:伽利略(Galileo)[1]和北斗卫星导航系统(BDS)[2].这四大卫星导航系统均可提供多频多信号服务,由于单频难以完全消除电离层延迟,而通过多频容易消除大多数电离层延迟,从而提高了整体定位精度.目前,我国自主研发的BDS由原先只能为中国和中国周边某些国家服务升级到可以为全球提供定位服务.
目前以BDS为主,融合其他全球卫星导航系统(GNSS),通过多模多频的融合定位机制,可以将原先GNSS的单模单频定位的可靠性、连续性和最核心的定位精度大大提升.多模多频融合导航机制逐步成为GNSS应用的主流方向.
1.2 差分增强融合技术
到目前为止,提高GNSS精度最可靠最有效的方法是差分增强技术,主要有局域增强系统(DGNSS)[3]广域地基增强系统(网络RTK)[4]以及广域天基增强系统(WAAS)等一些模式.
局域增强系统主要依附于一个或多个差分基准站进行解算差分改正数,可以使附近几十千米范围内的用户获得高精度定位结果;广域天基增强系统依托空间稀疏分布差分基准站,实时解算卫星精密轨道、精密钟差和电离层改正数,从而使得上千千米范围内达到亚米级、甚至分米级定位,广域地基增强系统依托密集的连续运行参考站(CORS)采用网络实时动态(RTK)技术,获得分米级、厘米级甚至毫米级的接收定位精度.WAAS、广域地基增强系统或者是广域天基和广域地基的综合增强技术目前已经成为广域精密实时定位发展的风向标.
1.3 实时精密单点定位(RTPPP)技术
RTPPP技术是一种基于实时精密轨道和精密钟差产品的精密单点定位(PPP)技术[5],对双频用户而言,只要能获得实时精密轨道和精密钟差,就能实现与网络RTK相当的定位精度,网络RTK基于陆态CORS网,在海洋、沙漠等地区并不能完全适用,对于动态用户,还存在CORS站频繁更换、数据传输量大等问题,RTPPP则具有全球性、普适性、实时性、精密性和经济型等优点.国际GNSS服务(IGS)一直致力于RTPPP服务,从2001年IGS启动实施以来,PPP服务研究得到了飞速的发展[6-12].
2 RTPPP模型及实验
2.1 RTPPP数学模型
所谓单点定位是指利用一台接收机进行定位的技术.PPP就是利用载波相位进行高精度的定位,即非差相位单点定位.精确定位的前提就是把这些距离的误差完美地消除,再用卡尔曼滤波或最小二乘法解算出位置.
PPP常用测码伪距和载波相位观测值进行定位,对一个双频接收机,Li(i=1或2)频段上的观测值为:
pi=ρ+c(dt-dT)+dorb+dtrop+
dion/Li+dmult/Pi+εpi,
Φi=ρ+c(dt-dT)+dorb+dtrop-
dion/Li+λiNi+dmult/Φi+εΦi.
(1)
式中:pi和Φi分别为Li上的伪距观测值、相位观测值;ρ为接收机到卫星的几何距离;dtrop为对流层延迟;dion/Li为Li上的电离层延迟;dmult/Pi和dmult/Φi分别为伪距和相位的多路径误差;εpi为伪距的观测噪声,通常是码元宽度的1%,对于GPS的C/A码小于3 m,P码小于0.3 m[13];εΦi为相位的观测噪声,通常约为波长的1%[14],单位m.c为光速;λi(单位:m/周)和Ni(单位:周)分别为Li上的波长和整周模糊度;dt为接收机钟差;dT为卫星钟差,单位s.
根据电离层误差与GNSS卫星信号频率成反比的特性,可以通过线性组合L1和L2上的观测值来消除99%的电离层延迟的影响[15].组合形式如下:
(2)

无电离层组合的RTPPP定位流程图如图1所示,由四大模块组成:1)数据接收:即接收机接收卫星播发的广播星历,以及得到相应观测值,还有通过网络获取SSR改正数;2)数据处理:计算卫星位置和卫星误差,以及各种误差处理;3)参数估计,一般用卡尔曼滤波估计位置、模糊度、接收机钟差、对流层误差等参数;4)结果输出:所得位置基于ECEF坐标系.广播星历难以达到PPP的目的,而精密星历很难实时获取,最终星历要一周后才可获得.为了实现RTPPP,目前较前沿方法是用SSR信息改正广播星历的误差.

图1 RTPPP定位流程图
2.2 RTPPP的定位结果及误差分析
在兼顾RTPPP时,正如1.3节所示的PPP定位模型,可利用扩展卡尔曼滤波(EKF)技术观测模型线性化后进行参数求解.用户在接收GNSS原始观测数据并进行相应的周跳探测和误差模型改正的同时,通过NTRIP客户端实时接收来自计算机网络的卫星位置钟差SSR修改值,生成精密星历,再通过扩展卡尔曼滤波实现定位结果.最终定位结果以及定位误差如图2所示.

图2 延伸点A处采集的定位结果
此外,在另两个延伸点采集的定位结果及误差如图3~4所示.
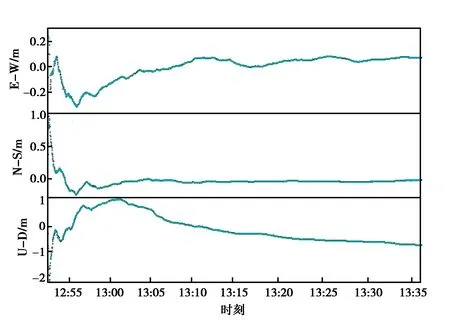
图3 延伸点B采集的定位结果
通过使用RTPPP技术对三个室外点位进行测试,收敛后定位结果为分米级,与伪距定位相比定位精度有很大的提高;与PPP技术相比定位时效性不言而喻,与载波相位的差分定位技术相比更具有独立性和灵活性.完全满足我们对后续室内初始点确定的要求.

图4 延伸点C采集的定位结果
3 室内初始点的确定
由于测试入口D受墙体的遮挡,接收信号必定会受到遮挡以及衍射的影响,导致定位结果误差较大,在点位D外部选择三个空旷点位A、B、C,使用RTPPP技术得到A、B、C三点地心地固坐标下的结果(x,y,z),使用激光测距的方法计算出A、B、C三点距D点的距离,为D点定位的距离,相当于卫星定位中的伪距,再通过三星定位模型得到D点的位置,实现室内定位初始点的绝对定位;即在A、B、C三点使用接收机接收广播星历和观测值,另外电脑连接接收机,在RTKLIB上登录BNC客户端实时收集SSR改正信息修正广播误差,得到实时精密星历,并进行解算得到A点定位位置,同理可得B点C点的位置.通过激光测距得到AD、BD、CD的长度确定D点地心地固坐标下的定位结果,解算出的D点,作为室内定位初始点,如图5所示.室内定位初始点的确立为算法的编写,及后期室内定位数据的采集和处理打下了良好的基础.
通过采集解算得到A、B、C三点地心地固坐标下的结果为
(-2.005094038900000×106;5.41105372290 0000×106;2.707964349000000×106);
(-2.005093723137986×106;5.41105348533 4096×106;2.707964240755195×106);
(-2.005179618287973×106;5.41102592066 3161×106;2.707957580346007×106).
三个点位距室内初始点位的距离分别为h1=104.32 m,h2=71.65 m,h3=152.94 m,之后通过三星定位模型:
结算出最终室内定位的初始点位地心地固坐标下的结果为(-2.005115122929998×106;5.411140760598876×106,2.707786426404829×106).
得到室内定位初始点后,将室内初始点坐标带入室内地磁定位的初始坐标,取代室内定位初始点(0,0,0).使得室内定位的每一个定位结果在室内外无缝定位下更有意义,同时也为后续的室内定位打下了坚实的基础.

图5 三星定位确定室内初始点
4 结束语
通过室外定位确立室内定位的初始点,使得室内定位的初始点位具有更多的标识而不单单是一个相对位置,将室内定位的初始点位变得更有意义,从而真正意义上实现了室内外的无缝定位.必将在未来的市场中得以广泛使用,成为填补室内与室外的最后一块拼图,提高室内外无缝定位的整体精度.
