海底网激光拉曼光谱仪器节点及试运行结果分析*
2020-09-17叶旺全刘春昊吴清天郭金家亓夫军郑荣儿
叶旺全,李 颖,刘春昊,吴清天,郭金家,亓夫军,程 凯,郑荣儿**
(1.中国海洋大学光学光电子实验室,山东 青岛 266100;2.中国科学院声学研究所南海研究站,海南 海口 570105)
海底缆系观测网的出现预示着对深海研究的一个新时代的到来[1],它的建设与使用为科学家们研究从微秒到年的跨时间尺度的海洋过程提供了极其有效的观测平台[2],例如深海微生物活动、海底火山运动、全球碳循环研究等[3-4]。近年来,全球各个国家包括中国都在推进缆系观测网的建设工作[5-7]。
观测平台的应用离不开新型观测仪器的发展,激光拉曼光谱技术以其非接触、原位及多组分测量的特点已被多次成功用于深海科考工作[8-9],而深海拉曼光谱系统由于体积、重量的限制,通常都是以ROV作为搭载平台进行短期的深海探测,且已经获得一些重要的研究成果[9]。海底观测网是激光拉曼光谱仪理想的工作载体,但是目前为止,并没有激光拉曼技术应用于海底观测网的相关报道。
“南海深海海底观测网试验系统”是针对中国海底观测网建设的迫切需求,重点在中国南海琼东南海域构建的一个缆系海底观测网试验系统,以实现对深海海底动力环境、化学环境、地球物理环境的长时间实时监测[10-11],对研究南海北部陆坡-洋盆过渡区的洋流及地质活动有重要意义。依托于该海底观测网试验系统,针对海洋观测对化学环境观测的需求,中国海洋大学基于激光拉曼光谱原理设计,在2009年研制完成并成功进行4 000 m海试的国内首台深海小型化激光拉曼光谱系统[12]的基础上,优化设计,提高可靠性、稳定性和探测灵敏度,重新研制了用于海底观测网运行的深海激光拉曼光谱仪器节点(OUC-Raman 仪器节点),对深海的多组分化学成分开展长期实时原位观测,为研究深海化学环境的异常波动提供更丰富的原位观测数据。
所研制的这套激光拉曼光谱仪器节点在系统设计和核心技术上,具有多项自主知识产权,在器件上,除CCD外的关键部件均已国产化。在与南海海底观测网成功于海底接驳成功后,已成为国际上首例用于海底观测网的长期观测拉曼光谱系统。
本文将简要介绍该仪器节点组成结构及与观测网的接驳情况,并对其自2016年入网后运行的观测数据及遇到的相关问题进行分析,为未来激光拉曼光谱技术用于深海长期观测提供经验储备。
1 观测网试验系统与OUC-Raman节点
“南海深海海底观测网试验系统”作为典型的缆系观测网,其基本结构如图1所示,通过陆地基站可以向海底设备源源不断提供电能,海底观测节点也可以实时地将获得的数据通过光缆传输至岸基,进而向互联网发布,突破了海洋传统观测方式的局限性,有效解决了海洋观测中“长期”和“实时”两大难题。

图1 海底观测网示意图及两套OUC-Raman仪器节点Fig.1 Schematic of cabled observatory network and OUC-Raman
由于建设和维护的高复杂度和困难度,新研制的仪器节点接入海底观测网系统后至少应能够有效工作一年以上,并能够在多次异常中断重启后仍保持稳定运行,为达到这一目标,在节点入网前需要进行以下检测并达到合格(见表1),才能够正式接入海底观测网。

表1 海底观测网系统准入条件一览表Table1 List of requirements of cabled observatory networks
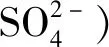
为了满足正式接入观测网的条件,课题组研制完成了两套激光拉曼光谱仪器节点,其中第一套(OUC-Raman-I)作为观测网试运行的测试机,于2016年8月底布放并接入观测网运行,配备一个基于532 nm激发波长的拉曼光谱探测舱(D532-I)和一个进行电源转换与通信控制的电子控制舱(Electronic Control Unit,ECU)。第二套(OUC-Raman-II)作为观测网长期工作的运行机,采用双机备份设计,同时配备两套拉曼光谱探测舱(D532-II和D785),分别在可见(532 nm)和近红外(785 nm)激光激发下运行,根据需要,两探测舱可交替运行或同时工作。该仪器节点于2017年6月15日布放并接入海底观测网运行(见图1)。
2 长期观测的设计与测试
为达到深海长期实时观测的目标,OUC-Raman节点在外壳制作上选用了防腐蚀的材料,其中测试机OUC-Raman-I采用316不锈钢壳体,运行机OUC-Raman-II则升级为TA2钛合金壳体,保证了运行机在海底长期放置过程中不会因为壳体的腐蚀而受损。在光学元件的选择和设计方面,考虑到各主要元件的寿命和效率,也做了双备份的设计。研制完成后,为了检验系统的各项指标及长期运行的可靠性,按照观测网系统对接入节点的准入要求进行了各种模拟环境试验和联调拷机试验。
2.1 双备份设计
OUC-Raman-II节点在OUC-Raman-I的基础上,增加了一套以785 nm激光为激发光源的光谱探测舱D785,由于激光器的使用寿命存在一定的极限,两套探测舱错时运行,不仅可以延长整套节点的运行时限,在光谱探测上,两者还可以进行互补和相互验证。该节点532和785 nm激光激发出的典型拉曼光谱如图2所示。
其中,D532的探测范围是540~700 nm,对应拉曼频移约为280~4 500 cm-1,D785的探测范围是805~950 nm,对应拉曼频移约为320~2 200 cm-1。两者对比而言,D532具有更大的探测范围,而D785则有更高的光谱分辨率。将两幅谱图以波长为横坐标绘制在一张曲线图中,可以看出,两个探测舱总体的探测范围包含了可见光的后半段和近红外的部分区域。由于拉曼散射的强度与波长的四次方成反比,所以532 nm激光比785 nm激光能够激发的拉曼散射的强度更大,而一般的分光(光栅)及探测仪器(CCD,Charge-coupled device)在可见光波段也具有更高的综合效率(见图2中虚线),以至于D532所获得的拉曼光谱整体强度较高于D785。然而,正因为532 nm的高能量,当照射海水中的可溶性有机物或叶绿素时,也会很容易激发出荧光,影响到拉曼谱峰的分析,所以D785的引入,既能起到很好的备份作用,又能在必要情况下排除荧光的干扰,D785同时也扩展整个系统的光谱接收范围,当海底中有别的发光物质时,被探测到的概率也会有所提升。
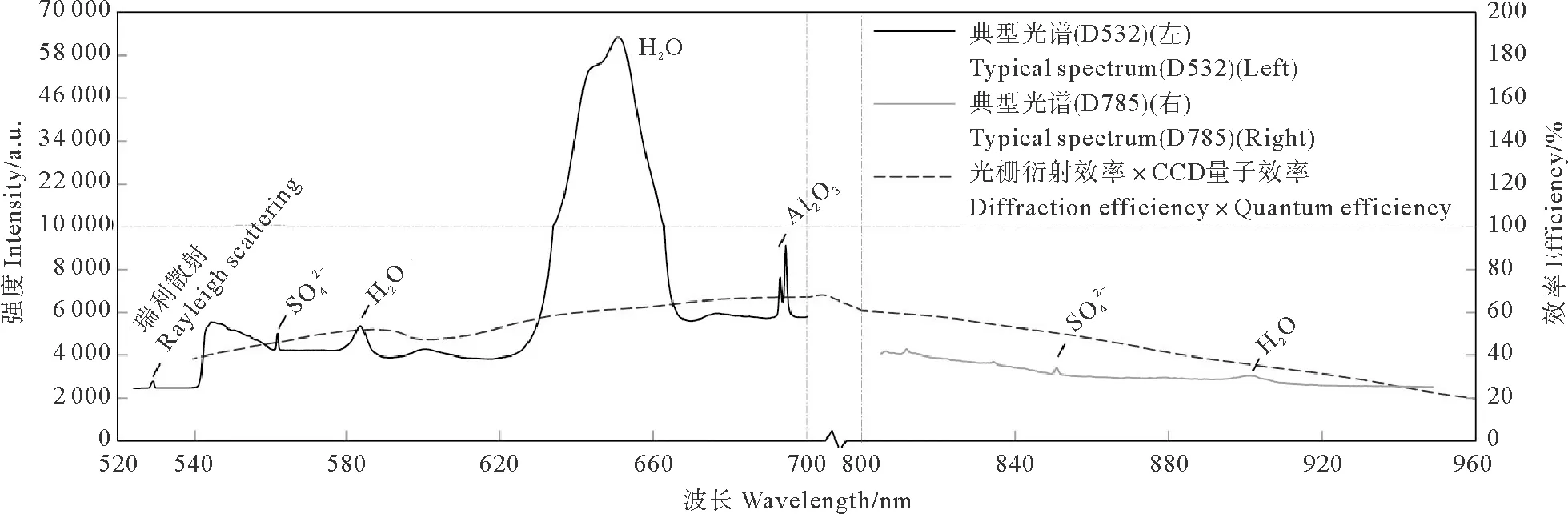
图2 两种波长激光激发产生的海水典型拉曼光谱Fig.2 Typical Raman spectra excited by 532 nm/785 nm lasers
2.2 环境试验与性能测试
为考核海洋仪器在运输、贮存及深海运行的环境适应性,依据海底观测网系统给定的准入条件以及国家和海洋行业对海洋仪器环境试验所制定的相关标准,OUC-Raman节点各舱体在装配完成后进行了一系列环境适应性试验,包括高低温试验(高温55 ℃贮存8 h,低温 0 ℃贮存8 h)、振动试验(频率2~13.2 Hz内,振幅1 mm,频率13.2~80.0 Hz内,振幅加速度7 m/s2,每条轴线上测试20个扫频循环次)、水静压力试验(额定水深2 000 m,试验压力25 MPa)等。
2.3 联调与拷机测试
节点布放入水之前,OUC-Raman-I和OUC-Raman-II分别于2016年6—7月、2017年3月在岸上水池接入观测网系统进行联调测试,并在水池开展长期拷机运转试验,对节点与观测网系统的连接兼容性、长期运行的可靠性和稳定性进行检验。
3 长期观测运行结果与分析
通过数十天的集成联调和拷机试验后,OUC-Raman节点才真正满足了观测网系统的入网条件,两个节点于2016年8月30日和2017年6月15日先后布放接入南海海底观测网,并通过岸基控制端远程操作启动成功,之后便由中国科学院声学研究所南海研究站的现场维护人员进行日常操作及维护。两套节点自接入观测网后均能够正常运行并获取拉曼光谱数据。
3.1 运行概况
图3展示了自OUC-Raman-I节点下水后,两套节点在深海(~1 740 m)观测网上的运行概况。图中下方的时间轴跨度达15个月(从2016年9月开始到2017年11月),3条等高不等宽的方块序列表示3个探测舱每次的运行区间,运行的间歇性是由观测网的整体运行周期决定的。OUC-Raman-I节点自2016年8月30日布放至2017年11月,运行时间总跨度已达到440 d,共成功启动50余次,每次启动后都能够正常运行,其中最长的一次连续不间断运行约429 h,累计总共运行3 652 h,平均约5 min记录一张拉曼光谱,共获得43 920条有效光谱。OUC-Raman-II节点于2017年6月16日布放后也一直运行正常。两探测舱D532和D785交替运行,从已获得的数据上来看,累计运行时间达到2 162 h,共获得25 744条有效光谱数据。节点在海底观测网上运行期间,经历了主体网多次的异常断电情况,而两套节点上包括ECU电子控制舱在内的多套设备并没有因异常断电而产生崩溃现象,并能在主体网恢复供电后迅速恢复工作。
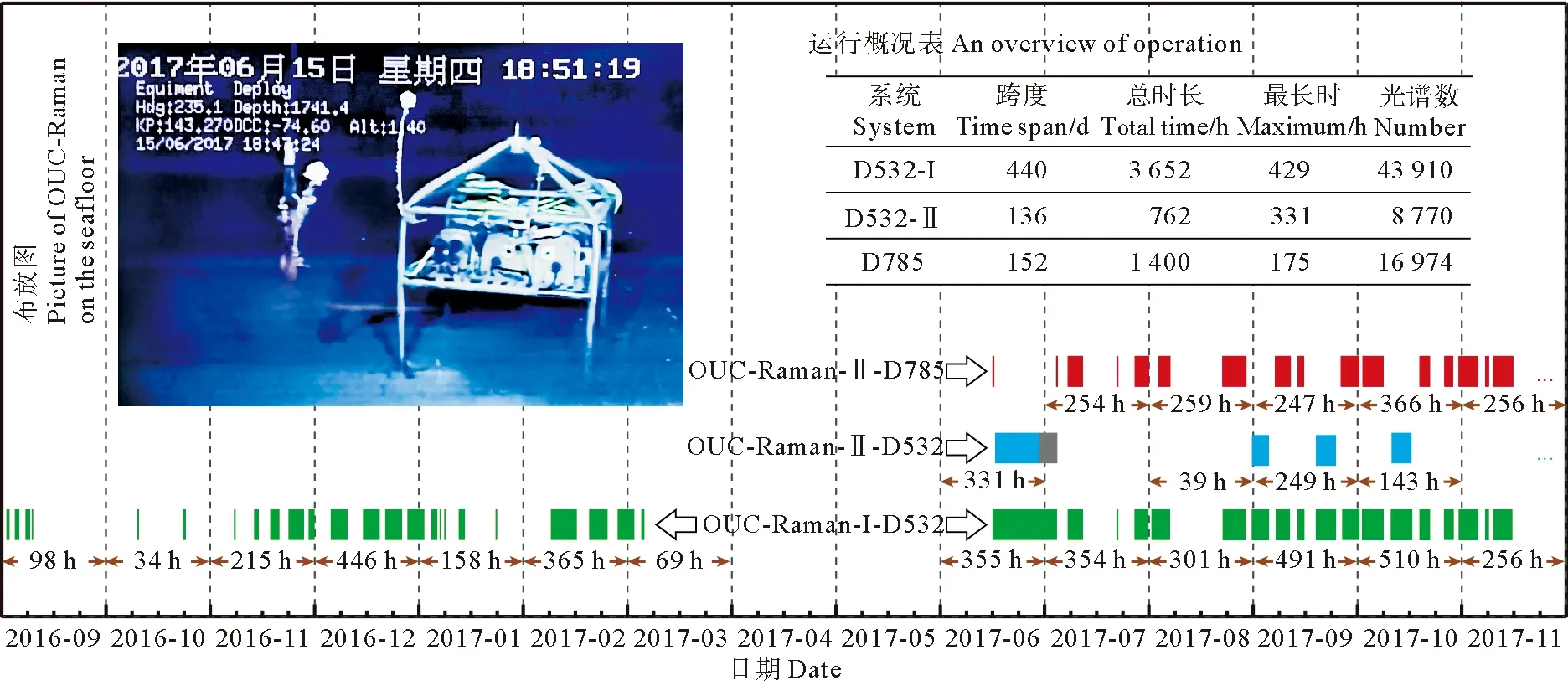
图3 运行概况图表Fig.3 An operation overview chart of OUC-Raman
(1)


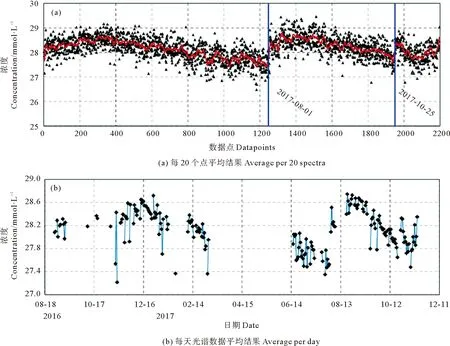
图4 浓度反演结果一览Fig.4 Results of concentration
3.3 数据结果及分析
3.3.1 谱峰形变与频移 OUC-Raman节点布放至海底之后,所处环境的水温一般在2 ℃左右,虽然整个系统在入网之前进行了0 ℃的短期贮存试验,但在这样一个低温环境长期运行,对系统内部各元件的性能仍是一个考验。而另一方面,由于各电子元件运行过程中释放的热能,各舱体内部温度也并不恒定,如图5(a)所示,这种变化的温度环境会对精密的光学元件的特性产生一定的影响。
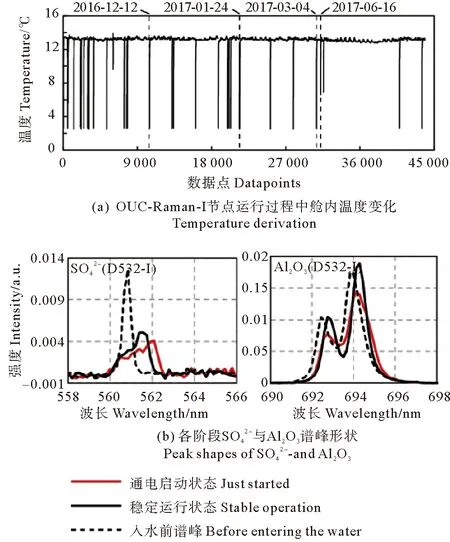
图5 舱内温度变化对波形的影响Fig.5 Peak shapes effected by temperature changes
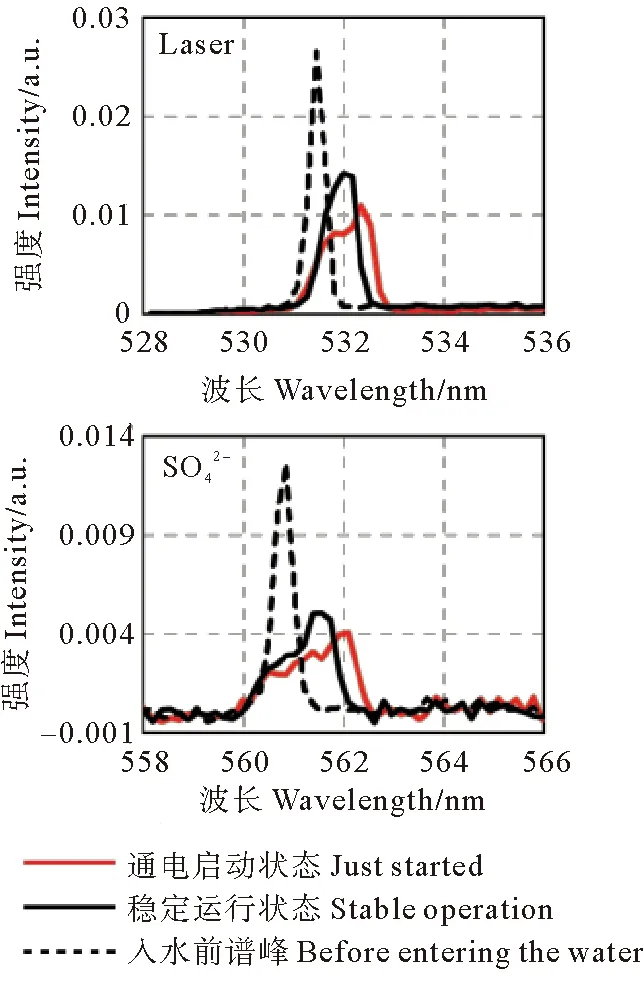
图6 OUC-Raman-I节点瑞利散射峰与峰形状变化Fig.6 Peak shapes of Rayleigh scattering and
同时,为了更加直观地描述温度和波长频移的相关性,选取了一段时间对瑞利散射和拉曼谱峰进行谱峰拟合得到不同时刻的峰位数据,与舱内传感器获取的温度数据对比如图7所示。

图7 舱内温度与激光瑞利散射及拉曼散射峰位衍化趋势Fig.7 Trends of temperature,locations of Rayleigh scattering and Raman scattering
从以上几个现象可以得知,节点放置到海底后激光器输出的激发光受到深海低温及高压环境的作用导致输出的模式发生了改变,并对激发的拉曼光谱产生了影响,而且当舱内温度发生变化时,激发光的波长会随之发生偏移,进而导致拉曼信号光的波长也发生漂移。
上面描述的D532-I光谱受舱内温度变化的影响,在更换了激光器后的D532-II中形变有所缓和,然而入水前后的峰位偏移仍然存在,对于D785也观察到类似的现象。
针对这一问题,后期需要在实验室模拟深海环境,并在此环境下对各光学设备及元件的性能进行测试和评估,找到确定的原因,对于获取的光谱则需要根据确定的变化规律采用谱峰校正手段进行处理,以使得获得的谱峰尽量接近真实线型。上述结果中可以看出温度是非常重要的一个影响因素,因此在节点的研制过程中需要将温度控制环节设计得更加完善和精密,保证仪器能够运行在一定的温度环境中。另一方面,需要联系相关仪器制造商在光学仪器的研制方面考虑深海环境的影响,从仪器本身解决这一问题。
3.3.2 水体温度和盐度 除舱内温度对仪器设备的影响外,水体温盐因素的变化也在光谱上有所响应。以D532-II获得的光谱为例(仅包含频移变化),手动将光谱的频移校正之后,截取水在1 640和3 420 cm-1附近的拉曼峰分别归一化后进行比较,比较结果如图8所示。

图8 入水前后水峰形状比较Fig.8 Comparison of water peak shape before and after entering water
入水前在岸上进行拉曼光谱测量时水温大约为25 ℃,测的是普通水体,而深海水温在2 ℃左右,且为高盐度海水,从图中可以看出,测得水的两处拉曼谱峰在节点入水前后谱线并不能完全重合,较大的3 420 cm-1附近的差异更为明显,大约以3 400 cm-1位置为两者的重合点,重合点左侧,水温较高的谱峰强度更大,重合点右侧呈相反趋势。与关于水的拉曼峰受温度和盐度的影响的相关文献进行对比发现[14],这种差异性确实来自于温度和盐度的共同作用。而在水溶液定标和测量的过程必须要用到水峰作为内定标元素(见公式1),因此水峰形状的改变也会增加测量结果的误差。
当用光谱手段对海水成分进行定量探测时,有必要在实验室研究不同温盐度环境下光谱的变化趋势,确认温盐度改变是否会增加测量结果的误差,并在不同温盐度条件进行标定,将会很大地提高长期原位观测结果的可靠性。
3.3.3 激光功率衰减 OUC-Raman节点探测舱内使用的激光器都是小型化的固体激光器,一般设计寿命在一万甚至几万小时以上,而实际使用时却并不会那么理想,并且随着运行时间的不断增加,激光的功率会不断地衰减,为了描述这一趋势,图9绘制了OUC-Raman-I光谱中几个典型峰的强度随着运行总时间的演化曲线。

图9 激光光强衰减影响硫酸根和Al2O3峰强度衰减Fig.9 The decay of Raman peaks intensities caused by laser decline

图测量的标准偏差随时间演化情况Fig.10 The standard deviation of
OUC-Raman节点的设计指标是有效工作一年,目前已运行超过440 d,由于观测网系统目前是间歇性运行状态,所以总运行时长仅有3 652 h,按这种工作强度算来,虽然激光功率有所衰减,但从衰减的趋势来看,差不多可以运行2年左右,如果观测网系统连续不断运行,则可能运转的天数将会明显减少,所以激光器的使用寿命也是未来研制长期光谱类传感器需要重点考虑的问题之一,而控制激光器的运行温度将是提高激光运行寿命的一个很好的解决办法。
4 结语
深海激光拉曼光谱子系统(OUC-Raman节点)作为应用于南海深海海底观测网试验系统上的一个完全自主研发的仪器节点,在完成了实验室功能测试、环境试验、浅海48 h试验以及长时间的联调拷机测试后,两套节点分别于2016年和2017年成功接入南海观测网,其中OUC-Raman-I经过440 d总时长3 652 h的入网运行检验,达到了“有效工作时间一年”的技术指标,全球首次将激光拉曼光谱技术与海底观测网相结合,OUC-Raman-II节点入网后也一直稳定运行。拉曼光谱技术以其非接触、原位及多组分测量的特点及OUC-Raman节点观测网上的运行结果展现了该新型传感器在海洋化学环境长期监测中的应用潜力。
作为一个自主研发的新型传感器,OUC-Raman有待完善和改进之处还很多,例如所遇到的谱峰畸变、温盐差异、激光衰减等各类问题,而海底观测网试验系统则是推进我国自主研发传感器进步发展的最理想的试验场孵化器。海大光谱类传感器研发团队将不断地迎接和解决深海长期运行所面临的系列问题和挑战,寄希望于不断地将正在研发的新技术和新设备在海底观测网试验系统上得到检验和应用。
