低成本脉冲激光测距系统研究
2020-09-17马鸿斌尚建华潘世光
马鸿斌 ,尚建华 ,潘世光 ,罗 远 ,贺 岩
(1.东华大学 信息科学与技术学院,上海 201620;2.中国科学院上海光学精密机械研究所 空间激光信息技术研究中心,上海201800)
0 引言
科技的进步加快了测距技术的发展步伐,同时也对测距系统提出了更为苛刻的要求。其中,激光测距技术利用激光优异的单色性以及极窄的脉冲宽度等特点,能够有效降低地面杂波的影响和背景噪声的干扰,在超低空或地面目标探测等领域具有明显的探测优势[1]。对于地理勘测以及复杂地理环境下的工程测量,激光测距系统能够提供较高的测距精度[2]。近年来,无人汽车[3]、无人机[4]、机器人等新兴技术的快速发展离不开高性能的测距技术,越来越多的新型智能装备将激光测距系统作为其探测模块,因此,对激光测距系统的测距性能(测距精度、动态范围和数据上传速率等)、功耗以及体积等方面提出了更高的要求,同时也衍生出了新的测距指标标准[5]。目前,激光器技术的发展成熟以及高灵敏度探测器等光电器件性能的不断提高给激光测距技术带来了新的机遇与挑战,如何提高测距系统的测距性能、如何有效降低系统成本、加快其实用化进程是未来激光测距技术的重要发展趋势。
激光测距系统是激光技术和现代信息处理技术的综合产物,其以激光作为探测媒介,通过对回波信号光的相位、振幅或偏振态等特征量的处理,计算得到目标的距离信息[6-7]。根据激光测距的工作原理,可将激光测距技术分为三角测距、脉冲测距、相干测距和光子计数测距。根据测距范围,可将激光测距技术分为近程、中程和远程测距[8]。根据探测方式,可将激光测距技术分为相干探测方式和直接探测方式。相干探测时,光电探测器是对本振光和信号光的拍频信号进行响应,再通过鉴频或鉴相处理得出距离信息[9]。直接探测[10]时,光电探测器直接对回波信号光进行响应。由于直接探测容易受到背景光的干扰[11]且要求单个回波信号光的能量必须大于光电探测器的等效噪声功率,因此,常采用响应快、噪声小、灵敏度高的雪崩光电二极管(Avalanche Photodiode,APD)探测微弱的回波信号光并对其进行光电信号转换,其次,在回波信号处理过程中也需要做消噪处理,以便提高测距的准确度[12]。
目前技术最为成熟且应用最为广泛的测距方法是脉冲飞行时间测距法和单光子计数测距法。脉冲飞行时间测距法,是通过测量发射信号光和回波信号光之间的时间间隔而得到距离信息[13];单光子计数测距法,是采用光子计数和数学统计的思想从回波信号光中提取得到距离信息[8,14]。
在信号处理方面,应用日益广泛的无人智能装备对其搭载的激光测距系统提出了新的要求,系统必须需要具备实时、准确的数据采集能力。然而,DSP和ARM的时钟频率比较低,仅能在软件层进行编程,无法满足实际应用时激光测距雷达的数据采集和处理要求[15]。相比而言,FPGA的时钟频率非常高且内部延时短,可直接编程实现相关逻辑功能,因而可作为激光测距系统的主控芯片,以达到工作可靠、设计灵活、响应迅速等要求。
综上所述,本文基于脉冲飞行时间测距原理设计实现了一套脉冲激光测距系统,系统采用直接探测的工作方式,并利用APD实现回波信号光的光电转换;在时序控制及距离信息提取方面,以FPGA作为主控芯片[16]控制激光脉冲的发射并从回波信号光中提取得到待测目标的距离信息。
1 脉冲激光测距系统工作原理
1.1 脉冲飞行时间测距原理
脉冲飞行时间测距法是通过测量发射激光脉冲与回波激光脉冲的时间间隔(即发射激光脉冲的往返时间)而得到待测距离信息的[17]。若激光脉冲的往返飞行时间为 t,光在空气中的速度为 c,则待测目标的距离S如式(1)所示。在实际的脉冲激光测距系统中,激光脉冲飞行往返时间t是由系统内部的计数器统计激光脉冲发射时刻与回波信号光到达时刻之间的时钟脉冲个数而计算得到的。如图1所示,测距系统的工作时钟频率为 f(周期为 τ),激光发射与回波信号到达APD表面之间的时钟脉冲个数为n,则待测距离 S可表示为式(2):


图1 脉冲飞行时间测距法工作原理
因此,激光脉冲往返时间t的精度将直接影响系统测距分辨率,而往返时间t的精度是由系统工作时钟的频率 f决定的(如式(3)所示),提高测距系统工作时钟频率f可显著提高系统的测距分辨率。

1.2 脉冲激光测距系统
如图2所示,脉冲激光测距系统由三部分组成,一是以FPGA芯片为主的主控模块,负责测距系统的时序控制以及数据采集和距离信息提取;二是发射光源部分,主控模块输出时序控制信号控制发射光源的驱动电路工作,发射光源按照相应的时序要求发射激光脉冲,经光学发射单元的光束准直作用后,垂直入射到待测目标表面;三是回波信号光接收模块,经光学接收单元作用,回波信号光在APD表面聚焦并由APD转换为电信号,再经过放大、整形等处理后,FPGA对该信号进行高速采集和实时处理,计算并输出待测目标的距离信息。此外,APD的电流放大增益M决定了其电流放大能力,为了使APD的电流放大能力保持稳定,测距系统中还设计了APD温度检测补偿模块,从而提高APD探测回波信号光的可靠性。
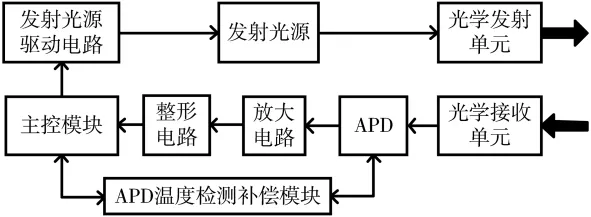
图2 脉冲激光测距系统原理框图
脉冲激光测距系统的工作波长为905 nm,工作方式为直接探测方式。因此,测距系统中的光电探测器APD只对回波信号光功率进行响应。APD主要性能指标包括光谱响应范围、量子探测效率、暗电流和最小可探测光功率等,如表 1所示。其中,量子探测效率与APD的工作波长有关,暗电流会随APD反向偏置电压的变化而变化,最小可探测光功率则直接决定了测距系统的最大可测距离。
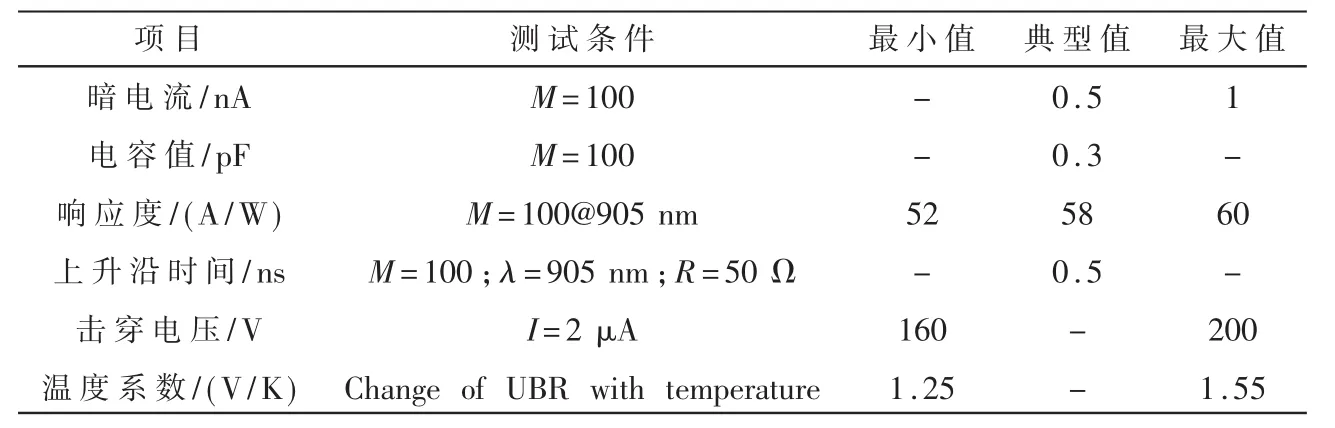
表1 APD的光电性能指标(工作温度23°)
根据外加偏置电压U的大小,APD的工作模式分为盖革工作模式和线性工作模式两种。当反向偏置电压U达到反向击穿电压UBR时,APD进入盖革工作模式;当反向偏置电压U小于反向击穿电压UBR时,APD工作在线性模式,此时APD输出电流与入射光功率成正比且容易区分光电流和暗电流[18]。本文设计的脉冲激光测距系统中,APD工作在线性模式下。
由于APD是温度敏感型光电探测器[19],APD的击穿电压UBR会因温度的变化而改变,如表1所示;对于APD的电流放大增益M,其值与反向偏置电压U、APD的制作材料以及反向击穿电压UBR有关,如式(4)所示:

其中,m是与APD材料结构有关的常数。
因此,测距系统中增加了APD温度检测补偿[20-21]模块,在反向击穿电压UBR随温度变化的同时,温度传感器实时监测该温度的变化情况并反馈给主控模块,再由主控模块中的FPGA设置相应的DA参数以调整APD的反向偏置电压U,进而使反向偏置电压U和反向击穿电压UBR同步变化,最终获得稳定的电流放大增益M。
1.3 时序控制及距离信息提取算法
本文设计的脉冲激光测距系统是面向近场高精度实时测距的应用需求,因此,测距系统中的时序控制以及距离信息的提取均是在FPGA主控芯片上使用Verilog语言编程实现的,包括发射激光脉冲的时序控制、信号采集、距离信息提取以及温度补偿控制等。
1.3.1 发射激光脉冲的时序控制
如图3所示,发射激光脉冲的时序控制包括设置发射激光脉冲的重复频率以及相应的D/A调制控制模块,其中,D/A调制控制模块包括控制激光器的DA_LD子模块和控制APD的DA_APD子模块两部分。
1.3.2 回波信号接收
测距系统发射激光脉冲经待测目标表面漫反射后,再经光学接收单元、APD、放大整形电路依次作用后,由FPGA中的高速收发器ALTGX接收。以FPGA高速收发器代替传统高速D/A芯片是节省测距系统成本的一个重要因素。当测距系统的最大待测距离为30 m时,可将ALTGX的采样率设置为 2 Gb/s(采样周期0.5 ns)。因此,测距系统只需在发射激光脉冲之后接收200 ns时长、共400个周期的回波数据,即可达到测距要求。并且,回波脉冲的到达时刻取脉冲上升沿与下降沿到达时刻的中间值,因此,在距离提取算法中,脉冲飞行时间的精度提升了两倍,根据式(2)和(3)可得系统的测距分辨率为 37.5 mm。

图3 发射激光脉冲的时序控制
在利用脉冲飞行时间测距法测量距离时,为了降低测距误差,需要准确获得激光脉冲的发射时刻和回波脉冲信号的到达时刻。若time1和time2为回波脉冲信号上升沿时刻和下降沿时刻对应的计数器值,则回波脉冲信号返回时刻对应的计数器值取二者的平均值,因此,待测距离S可表示为式(5):

当ALTGX完成400个周期的回波数据采集之后,再将其以25个16位数据并行输出给后续处理单元,以提取待测距离信息。
1.3.3 距离信息提取
在计算待测距离信息时,首先由FPGA中的parallel_serial模块按照设定的逻辑顺序将收到的25个16位并行数据转换为400位串行数据serial_data并输出,parallel_serial模块的数据转换输出时序关系如图4所示。由于FPGA是以ALTGX输出的频率为 125 MHz(周期 8 ns)信号作为工作时钟(clk)的,因此,parallel_serial模块完成数据采集和串行数据输出至少需要425个工作时钟,即至少耗时3.4μs。
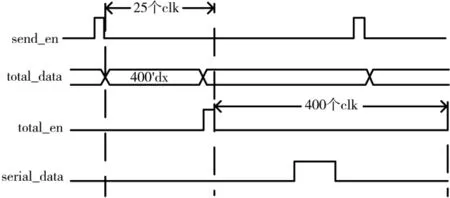
图4 parallel_serial的数据转换输出时序关系
然后,上述携带有距离信息的400位数据被等分为四部分并进行并行数据处理,如图5所示。对于每部分信号,首先在pre_caculation单元中设定采样阈值宽度并依次判断各回波信号的脉宽情况,从而滤除部分无效回波信号,降低背景光等噪声的干扰。当信号脉宽大于阈值宽度时,回波信号被判定为有效数据,反之则视为噪声并加以去除。其次,分别判断各回波信号上升沿和下降沿的准确到达时刻,并在distance_caculation单元中依据测距公式初步计算待测距离值。最后,综合考虑APD工作温度、激光器D/A设定、目标反射率等因素的影响,在distance_adjust单元中校正测距结果,并将校正后的距离值发送到average_distance单元,与其他三个进程得到的校正距离执行累加求平均的算法,最终得出待测目标的距离信息。其中,增加累加平均的次数可进一步提高系统的测距精度,但是也会降低距离信息的计算速度。在提取距离信息的同时,FPGA主控芯片还输出激光脉冲重复频率的控制信号。
由于测距系统中激光的重频为1 MHz,因此,FPGA主控芯片采用乒乓操作模式实现数据处理和时序控制等功能,进而有效提升了测距系统的数据处理速度,优化了系统的实时性,使系统能够快速获得待测距离信息。
2 实验验证
在实验室条件下,以反射率为0.1的泡沫板为待测目标,且泡沫板距离测距系统发射望远镜8.08 m。基于上述脉冲激光测距系统搭建测距性能测试实验平台,以初步验证测距系统的可行性和测距精度。针对泡沫板材料,共进行9组测距实验,并对回波信号累加平均次数与测距结果标准差之间的关系进行了比较分析,修正了距离提取算法相关参数,所得测距结果如表2所示。由表2可知,测距系统获得的距离值分布在8.07 m~8.085 m之间,当测距值为8.08 m时,测距系统的测距精度可达5.43 mm。
3 结论
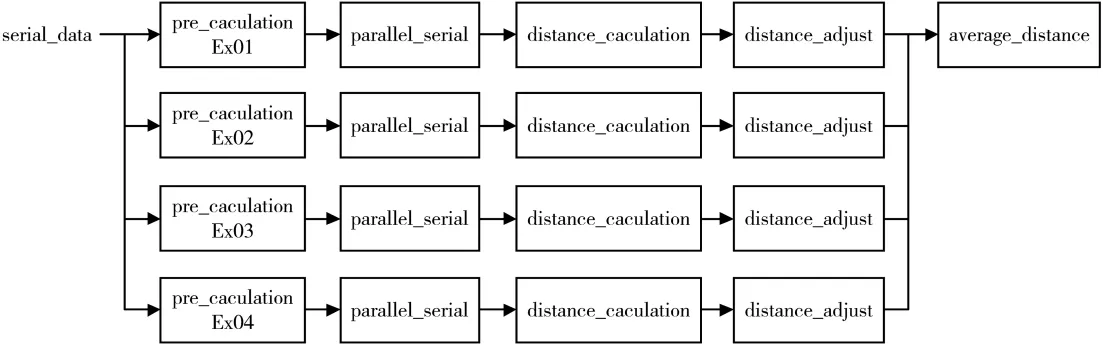
图5 距离信息提取流程图

表2 系统验证测试数据
随着无人驾驶、仓储报警等新型智能应用的不断推广,近程高精度激光测距雷达的需求不断增加,如何降低设备成本、减小系统功耗和体积、提高测距精度是近程激光测距雷达的一个重要研究方向。本文针对近场测距(30 m)的需求,提出了基于脉冲飞行时间测距法的脉冲激光测距系统设计方案,借助FPGA主控芯片同时实现时序控制以及信号的高速采集和实时处理。较传统的高速AD采集芯片而言,本系统中FPGA的高速收发器ALTGX可显著降低系统的成本和故障率;并且,通过累加求平均等距离信息提取算法,可在FPGA上实时获取待测距离信息;在实验室条件下,通过测距性能验证实验,获得了泡沫板目标的距离信息,且系统测距精度可达5.43 mm@8.08 m。相较于市场同类型的产品而言,该测距系统有效提升了近程测距的测距精度,并且降低了系统的生产制造成本。后续,将深入开展近程测距实验研究,判断脉冲激光测距系统的测距性能,测试不同条件下系统的测距能力和测距精度,并通过灰度校正等手段进一步提高系统的测距精度和测距准确度。