应用于传声器阵列定位校准的空间点声源声场拟合方法
2020-09-15张羽霓王庆庆李永亮
张羽霓,王庆庆,唐 俊,闫 磊,李永亮
(1. 天津大学建筑工程学院,天津300350;2. 天津大学港口与海洋工程天津市重点实验室,天津300350;3. 北京航天计量测试技术研究所,北京100076;4. 中国电力科学研究院,北京100192)
0 引 言
控制噪声源是噪声治理应用中最有效和最根本的方法。要实现对噪声源的控制,首先需要确定噪声源的位置,即噪声源定位。
传声器阵列是指由一定的几何结构排列而成的若干个传声器组成的阵列。基于传声器阵列的声源定位[1]是指用传声器阵列拾取声音信号,通过对多路声音信号进行分析与处理,在空间域中定出声源位置。随着科技发展,对声阵列定位技术的准确度提出了更高的要求。目前主要通过改进算法和提高声阵列本身精度等方法对声阵列定位技术进行突破。然而,这两种方法在计算定位结果时,由于阵列传声器系统中传声器个数较多(一般通道数为几十个到上百个,超大阵列系统甚至可达上千个),分别去校准每个传声器的灵敏度和相位并不现实。传声器阵列的阵列架加工误差以及传声器在阵列中安装方式的差异等因素会引起数据采集系统各测量通道间固有的相位差和幅值差。为了降低系统误差,需要对整个传声器阵列系统的定位精度进行校准。李元首等[2-3]通过分析阵列传声器采集的数据与品质可靠的标准传声器采集数据的差别,处理阵列数据使其与标准数据尽量接近。此方法受环境因素影响较大,实验结果表明,这种阵列标定方法在无干扰的消声室中效果良好,但不能应用于工程实际。Oerlemans等[4]提出了利用线性不相干单极子声源校准阵列声源定位精度的方法。研究结果是基于声源远离阵列基础上的,即声源为空间理想点声源。在实验时使用一个空间尺寸较小、空间指向性较小的扬声器模拟点声源进行校准。由于扬声器的尺寸不能忽视,这种方法在精度要求较高的情况下,无法满足各项实验需求。
针对传统校准方法存在的问题,本文提出了一种基于自由场点声源模拟系统的声阵列成像校准方法。首先提出了一种空间点声源模拟方法,接着基于该方法设计了一套空间点声源模拟系统,最后完成了阵列定位位置精度的校准。此方法操作方便、校准精度高、不受环境因素影响,故可应用于工程实践,满足高精度需求。
1 点声源模拟系统
基于球面波声场传播模型的多通道点声源空间声场合成算法,本文设计了一种空间虚拟声源。传声器阵列定位系统如图1所示,在坐标系中心,放置直径为D的传声器阵列,每一个传声器位置坐标为rm。声源平面被划分成N×N的网格点,运用波束成形算法依次扫描每个网格点,获得坐标rs处的声源强度。运用此模拟系统可获得当声源网格点处有固定频率、幅值、相位的点声源时,传声器处对应的声音信号。
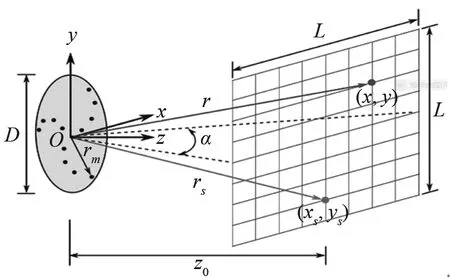
图1 阵列系统示意图Fig.1 Schematic diagram of the array system
在实际测量中,由于传声器阵列与声源间的距离是一定的,声源平面上各声源辐射声波更接近球面波[5]。阵列各传声器接收的声压信号不仅存在相位差异,而且存在幅值差异,这些差异与传声器和声源的空间位置密切相关。球面波声场中传感器接收信号示意图如图2所示。
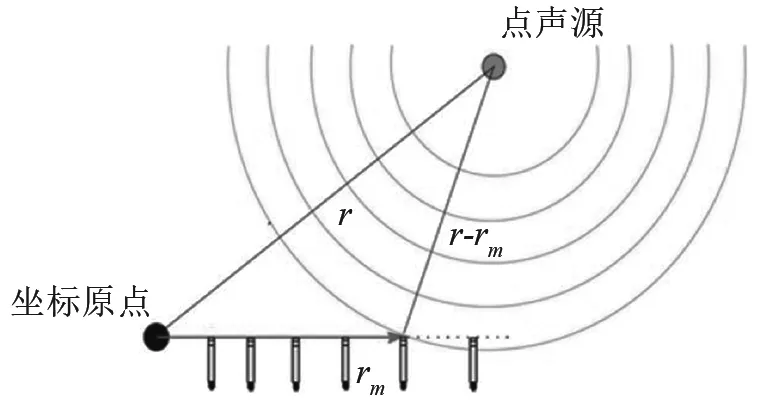
图2 球面波声场中传感器接收信号示意图Fig.2 Schematic representation of sensor receiving signal in the spherical sound field
虚拟的单极子点声源位于声源计算平面上r位置,P0为其声源信号,没有反射的自由声场中格林函数为

其中,k=ω/c为声波波数,ω为角频率,c为介质中的声速;r代表声源的位置。
则各传声器接收的声压信号为

其中:P0为虚拟点声源的声信号;rm代表传声器所在位置。由于点声源的半径r0比声波波长小很多,是一个满足kr0≪1 条件的脉动球源,点声源声场辐射声压为

其中:ρ0为介质静态密度;c0为介质中的声速;h(x,y,z)为点声源面元到传声器所在位置的距离;α(x,y,z)为面元的初相位;为点源强度;ua为点声源表面振速幅值。
通过式(2)、(3)可计算出空间中存在单极点声源时,声场中每个传声器所在空间位置的动态声信号。将计算得到的声信号通过耦合腔声源(详见第 2节)分别传输给声阵列的各个传声器,使其接收到的信号与声场模拟中应该接收到的信号相同,即可完成点声源的模拟。该方法可以精确模拟不同位置、频率、幅值、相位的空间声源。
2 传声器阵列定位精度校准装置
2.1 耦合腔标准声源设计与标定
本文中所采用的声阵列耦合腔标准声源为浙江爱华仪器有限公司定制生产的AWA14424S型声阵列耦合腔标准声源(如图 3所示),其内部结构设计如图4所示。其中,耦合腔声源一端安装了一个活塞式声发射面板,通过一个耦合腔设计将标准声源和待校准传声器连接在一起。待校准传声器从左侧插入,使用带密封圈的紧固螺栓固定,保证耦合腔内是一个封闭的空间,从而组成了一个耦合腔标准声源,该声源可按照预设值发出所需的声信号。

图3 AWA14424S型耦合腔标准声源Fig.3 Type-AWA14424S coupling cavity standard sound source
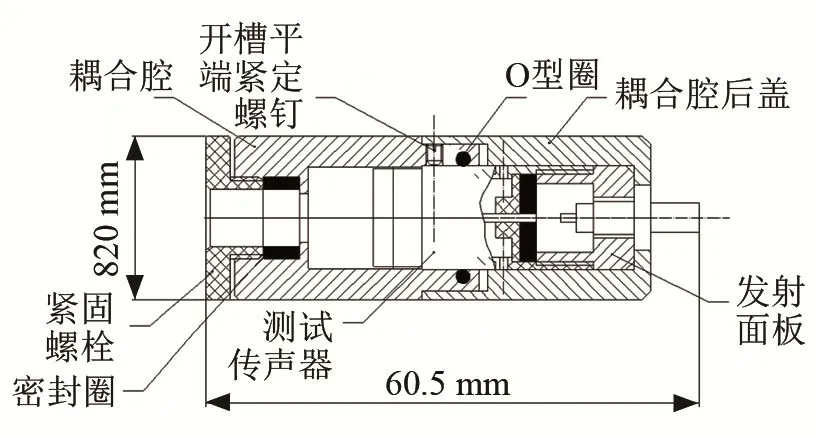
图4 耦合腔标准声源结构设计Fig.4 Structure design of the coupling cavity standard sound source
为了使传声器阵列声源定位精度的校准结果更加精准、降低实验误差,需要对耦合腔标准声源进行标定。标定过程如图5所示。逐一在需标定的耦合腔标准声源的左侧插入同一个已被校准的 B&K 4938传声器。记录各个耦合腔声源输出信号的幅值响应,运用互谱分析方法处理不同频率下的初始声信号x1(n)和耦合腔声源输出的信号x2(n),从而得到耦合腔与标准传声器之间的相位差数据。
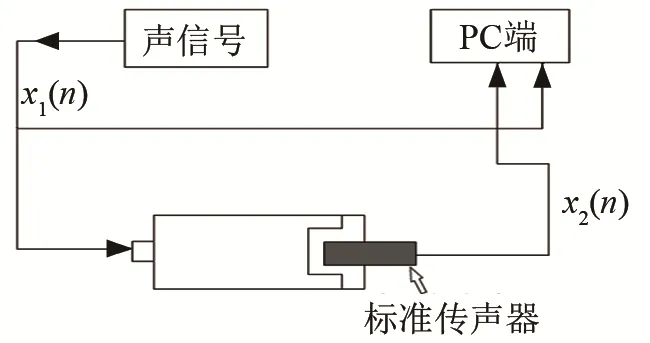
图5 耦合腔标准声源标定过程Fig.5 Calibration process of the coupling cavity standard sound source
通过对不同的耦合腔标准声源的幅值与相位差的一致性进行检验与修正,实现对耦合腔声源的标定。一致性表现较差时,可建立修正数据库,以此数据库修正耦合腔的输出,确保输出信号的同步性与精度。本文对一个32通道的传声器阵列(详见第3节)进行定位精度校准研究,图6为对所使用的32个耦合腔幅值与相位差进行归一化处理后的一致性曲线。可以得出本文中所使用的AWA14424S型耦合腔标准声源一致性较好。
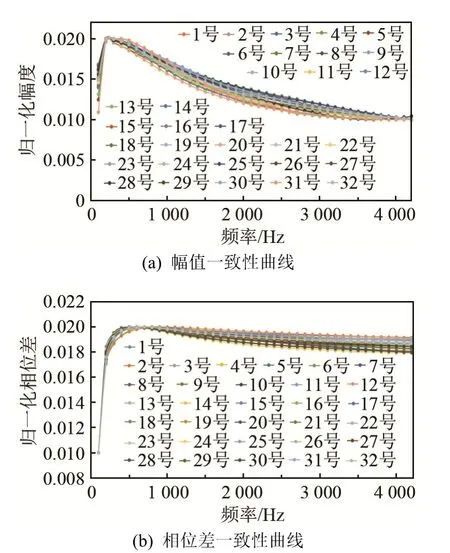
图6 32个耦合腔标准声源幅值与相位一致性Fig.6 The consistency of amplitude and phase of 32 coupling cavity standard sound sources
2.2 传声器阵列声源定位精度校准流程与装置
具体校准流程分以下几步:首先利用上面的算法计算出各个传声器的动态声信号;接着利用耦合腔标准声源将对应的多通道声压信号输入到被校准的声阵列系统中,完成点声源的模拟。然后使用被校准声阵列进行声源定位计算。最后将模拟点声源的位置与阵列定位的位置进行比对。传声器阵列声源定位精度校准具体流程图如图7所示。
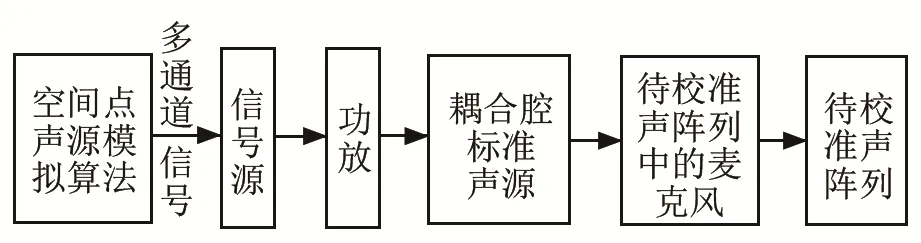
图7 传声器阵列定位精度校准装置校准流程图Fig.7 Calibration flow chart of microphone array positioning accuracy
传声器校准装置如图8所示。信号发射装备将计算好的动态声信号传至对应的耦合腔部件,耦合腔内标准声源发出对应的声音。各个传声器接收声音后通过空间多通道声场合成算法进行定位计算。同时,建立传声器阵列精确计量校准和误差分析系统。
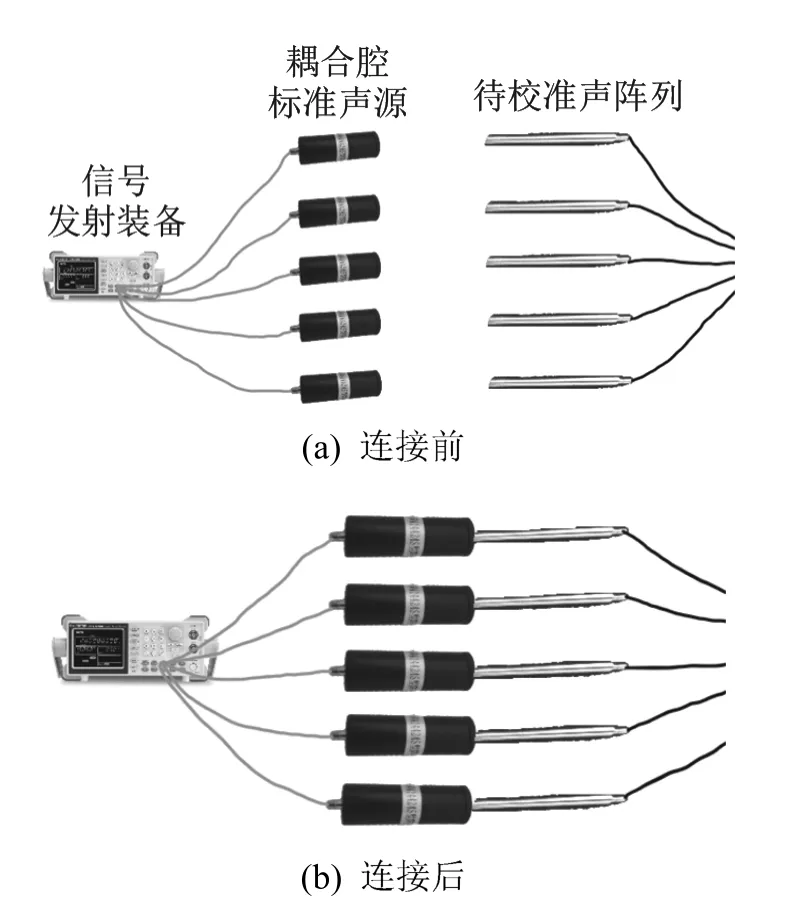
图8 传声器校准装置原理示意图Fig.8 Microphone calibration device
3 传声器阵列声源定位精度校准研究
应用前面介绍的传声器阵列声源定位精度校准装置,本文对一个32通道传声器阵列进行了声源定位精度校准研究。
3.1 传声器阵列波束形成声源定位算法
本文被校准对象为一个 32通道的传声器声阵列,该阵列采用波束形成算法计算声源位置。波束形成是目前传声器声阵列应用最普遍的一种方法[6-7],在传声器阵列技术方面占据着举足轻重的地位。波束形成法测量速度快、计算效率高,可以进行各种距离的测量,尤其是在中长距离时。无论是稳态声源还是瞬态声源,波束形成都具有较高的定位精度[8]。如图9所示的延时-求和-平方模型是普通波束形成的示意图。
图9 普通波束形成的方框图Fig.9 Block diagram of general beamforming
传统的波束形成中[9]:
其中,向量e(r) ∈ CM×1是位置向量r处的转向向量。
在单极点源假设下,均质流介质中,记录转向矢量的方法为[10]

其中:‖r‖是波束形成器聚焦位置到阵列中心的距离;‖r-rm‖是波束形成聚焦位置到第m个传声器的距离(如图1中所示);f为频率。
3.2 传声器声阵列系统声源定位精度校准实验与结果分析
一般情况下,阵列中使用的单个传声器的频率范围为 20 Hz~20 kHz,测量的有效声音信号数据频率范围也可达到 20 Hz~20 kHz[11]。然而,整个系统实际可定位的频带要小于该范围。阵列定位系统的低频主要受限于分辨率。频率越低,分辨率越差。当频率过高时,由于空间混叠产生无法分辨的鬼影,阵列的有效动态范围较小。
本文中被校准的传声器声阵列如图 10所示,实验采用美国 PCB传感器制造公司(PCB Piezotronics Inc.)制造的130E22型驻极体传声器(如图11所示)、浙江爱华仪器有限公司生产的AWA14424S型声阵列耦合腔标准声源、32通道的数据输出卡、32通道的数据采集卡以及PC端测量采集软件。在精确校准阵列分辨率和动态范围基础上,使用点声源模拟系统精确模拟从低频到高频的空间点声源,从而定量给出阵列的有效频率响应范围。

图10 32通道传声器声阵列实物图Fig.10 Picture of 32-channel microphone array
图11 130E22型传声器Fig.11 Type-130E22 microphone
实验模拟了 50~5 000 Hz 的单频空间点声源(按照1/3倍频程),对传感器阵列进行校准。被校准的32通道传声器阵列使用3.1节中所述的波束形成算法,声压级设置为 50 dB,通过对比传声器阵列定位的位置与模拟点源的位置,校正阵列定位位置的精度。设定模拟声源的位置分别位于中心点(0, 0)和(0.4, 0.4)。实测点声源坐标的实验数据如表1所示。
表1 不同频率下模拟点声源坐标对应的实测坐标值Table 1 The measured coordinates corresponding to the coordinates of the simulated point sound source at different frequencies
图12给出了在200~4 000 Hz不同频率下,传声器阵列定位位置与模拟点声源在(0, 0)位置处的对比(图中的黑点为坐标原点,图中的色棒代表声压级的范围为56.3~56.9 dB)。
由校准实验结果对比图可以发现,模拟点声源位置与声阵列定位的位置重合度较好。结合实测坐标值进一步得到:当频率较高(630~4 000 Hz)时,传声器阵列定位的坐标值是恒定的,且图形结果显示较好,阵列定位位置与模拟点源的位置重合,校准精度高;当频率较低(200~500 Hz)时,传声器阵列定位的坐标值有小幅波动,但波动小于0.02 m,同时图形结果显示较差,在软件中调小动态范围,图形全部显示后,两个位置也是重合的。实验结果表明,被校准的32通道传声器阵列的有效频率响应范围为200~4 000 Hz。这说明本文提出的基于自由场点声源模拟系统的传感器阵列成像校准方法对声阵列的校准精度较高。
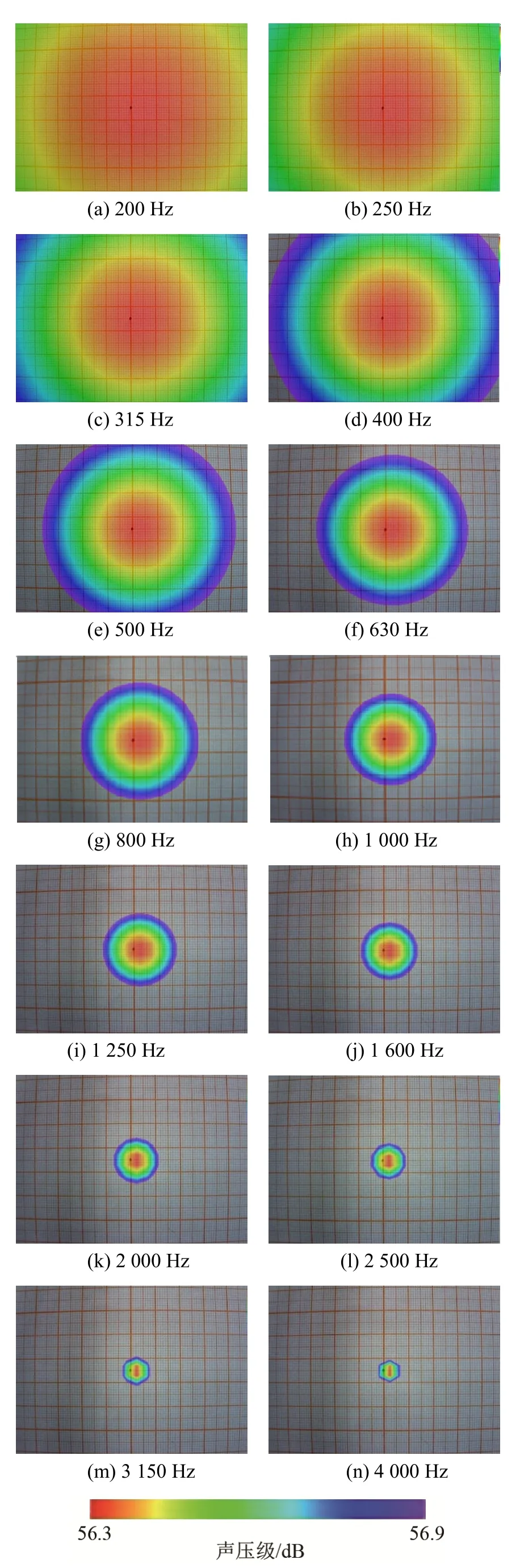
图12 对200~4 000 Hz单频点声源的传声器阵列定位声图像Fig.12 Acoustic images of microphone array positioning for 200~4 000 Hz signal frequency point sources
4 结 论
本文介绍了一种基于多通道标准声源的空间点声源声场模拟方法,并利用此方法设计了一套空间点声源模拟系统。本文设计了一个无空间指向性、空间尺寸极其小的点声源,精确地模拟了从低频到高频的空间点声源,定量给出了阵列的有效频率响应范围,实现了对传声器阵列系统定位准确性的校准,为传声器阵列系统声源定位精度校准的研究提出了一个新的思路与方式。
实验模拟了50~5 000 Hz频率下的空间点声源对声阵列进行校准,被校准的32通道传声器阵列采用波束形成算法,对比传声器阵列定位的位置与模拟点源的位置。结合 200~4 000 Hz点声源位置与传声器阵列定位位置对比图,实验结果表明本文提出的基于自由场点声源模拟系统的传感器阵列成像校准方法对传声器阵列的校准精度较高。该方法操作简单,定位精度高,不受环境因素的影响,可以方便地校准传声器阵列系统定位精度。因此,本文提出的基于多通道标准声源的空间点源声场模拟方法能够满足各种实验要求,具有工程应用意义。