基于排列熵算法的自动化机械设备运行状态监测
2020-09-15林四连
林四连
(黎明职业大学,福建 泉州 364200)
随着自动化机械设备不断应用,对自动化机械设备运行状态监测受到人们的极大关注。通过对自动化机械设备运行状态监测,结合运维特征分析方法,进行自动化机械设备运行状态的可靠性监测,提高自动化机械设备运行状态的运维特征分析能力,研究自动化机械设备运行状态监测方法,在自动化机械设备运行状态可靠性分析中具有重要意义。相关的自动化机械设备运行状态监测方法研究受到人们的极大重视[1]。
传统的监测方法通常是根据机械设备常见的故障数据,结合以往的经验进行主观判断,但这种监测方法主观因素影响较多,机械设备监测的准确性较低[2],所以未被大量应用在实际的监测中。目前,常用的机械化设备监测方法包括:振动监测方法[3]和温度监测方法[4]。振动监测方法是通过正常机械化设备运行的动态性与出现异常的机械化设备进行运行数据对比,如振动频率等。该方法通过机械化设备运行数据的对比,可以判断机械设备的运行状态,但该方法在数据对比过程中由于对比数据较多,步骤繁杂,导致自动化机械设备运行状态监测的准确率较低。温度监测方法是根据自动化机械设备中某一部件对温度的敏感性进行监测。该方法可根据周围环境温度的变化识别机械化设备的运行状态,但该方法在监测过程中易受到外界因素的干扰,对自动化机械运行状态的监测实时性较差,不能及时反馈机械化设备运行状态。
基于上述问题的存在,本文提出基于排列熵算法的自动化机械设备运行状态监测技术。在自动化机械设备运行状态特征和运维可靠性分析的基础上,实现自动化机械设备运行状态监测。建立自动化机械设备运行状态监测的组分监测模型,结合运维动力学分析方法,进行自动化机械设备运行状态监测模型优化设计。通过构建自动化机械设备运行状态监测的分析模型,提取机械设备工况运行状态特征分析特征量;采用模糊信息检测方法进行自动化机械设备运行状态的排列熵特征量特征检测,结合排列熵分析方法,分析自动化机械设备的运行状态;采用关联特征检测方法提取自动化机械设备运行状态的机械设备运行可靠性特征量,通过排列熵组合算法,实现自动化机械设备运行状态监测。仿真实验结果表明,本文方法在提高自动化机械设备运行状态监测的准确性方面具有一定的优势。
1 机械设备工况运行状态特征分析
1.1 机械设备运行状态检测
为了实现基于排列熵算法的自动化机械设备运行状态监测,构建自动化机械设备运行状态监测的机械设备工况运行状态特征分析模型,监测自动化机械设备运行状态;分析质量数据的分布式融合模型,采用模糊信息分析方法,进行自动化机械设备运行状态监测状态分析,得到自动化机械设备运行状态监测的模糊模型的元素为:
(1)
式中,“*”表示复共轭。计算各个监测节点进行自动化机械设备运行状态监测的统计特征量。采用多目标检测方法,监测自动化机械设备运行状态,建立机械设备运行状态,分析动态特征量为:
(2)
式中,c4si=cum{|si(t)|4}表示机械设备运行状态分析的描述形态特征量;采用统计特征量分析方法,得到si,其表示自动化机械设备运行状态监测的峰度。用C4s表示机械设备运行状态分析的均匀谱,即:
C4s=diag[c4s1,c4s2,…,c4sL]
(3)
在污浊的环境中,确定自动化机械设备运行状态的运维形态谱峰和谱密度。当满足0≤m,n≤P-1,则有:
C1=AC4sAH
(4)
其中,A是一个维数为P×L的高阶统计特征量分布矩阵。
根据机械设备振动特征,实现非平衡数据多目标检测[5],输出的自动化机械设备运行状态的运维形态检测参数Φ,Ω,Λ,分别为:
Φ=diag[ej2φ1,ej2φ2,…,ej2φI]
(5)
Ω=diag[e-j2γ1,e-j2γ2,…,e-j2γL]
(6)
Λ=diag[ej2w1,ej2w2,…,ej2wL]
(7)
综上分析,在机械设备振动特性分析方法下,建立自动化机械设备运行状态监测的大数据分析模型;当满足span{Es}=span{A},考虑机械设备的运维分布偏移特性,得到自动化机械设备运行状态的运维形态分布矩阵TL×L,即:
EsT=A
(8)
提取机械设备工况运行状态特征量,采用模糊信息检测方法,检测自动化机械设备运行状态的排列熵特征量特征。
1.2 自动化机械设备运行状态分析
(9)
(10)
(11)
南桐选煤厂采用小直径重介质旋流器分选0.5~0.075 mm粒级的高硫难选煤,其分选可能偏差Ep值为0.057,煤泥降硫率达到14.3%,总精煤硫分下降4.83%。与常规浮选基本没有降硫效果相比,煤泥重介质旋流器是分选粗煤泥的一种较好方法[3]。
2 自动化机械设备运行状态监测优化
2.1 排列熵算法
采用模糊信息检测方法检测自动化机械设备运行状态的排列熵特征量特征;结合排列熵分析方法,分析自动化机械设备运行状态。自动化机械设备运行状态监测的稳定状态特征分布为C2,其排列熵元素C2(m,n)为:
C2(m,n)cum{(t+1),xm+1(t),(t),xn(t)}
(12)
通过自由基偶联分析自动化机械设备运行状态的排列熵特征量模糊信息特征。通过自由基偶联得到烯醇采样结果,即si(t)≈si(t+1)。结合多参量融合方法,得到自动化机械设备运行状态的运维形态检测样本分布集:
(13)
在稳定工况作用下,进行自动化机械设备运行状态的全自动运维,得到运维组分特征分布矩阵为:
C2=AC4sΛHAH
(14)
基于状态特征迁移重排,得到自动化机械设备运行状态监测的高分辨融合矩阵为4P×4P矩阵,即:

(15)

C=E∑EH
(16)
式中,E=[e1,e2,…,e4P]为自动化机械设备运行状态的特征分布酉矩阵;∑=diag[σ1,σ2,…,σ4P]为特征值组成的对角矩阵,且
σ1>…σL…>σL+1=…σ4P=0
(17)
根据参数融合分析方法,得到自动化机械设备运行状态中运维监测特征量,采用排列熵算法检测运行状态特征[7]。
2.2 自动化机械设备运行状态监测优化
采用关联特征检测方法提取自动化机械设备运行状态的可靠性特征量。通过排列熵组合分析机制,实现自动化机械设备运行状态监测。结合排列熵分析方法,分析自动化机械设备运行状态[8-9]。在各个监测节点,得到自动化机械设备运行状态的先验概率分布为:
(18)
Kx=E[x4(t)]-3E2[x2(t)]b
(19)
其中,E[x3(t)]为衰减特征,b为迭代次数。基于排列熵算法,引入动态加权因子,得到自动化机械设备运行状态的机械设备运行可靠性监测模糊度函数为:
(20)
采用全自动流动数据集特征分析方法,将X划分到C个聚类簇中,得到可靠性状态特征分布为:
(21)
(22)
采用状态动态重组,得到自动化机械设备运行状态的运维组分监序列为x(t),t=0,1,…,n-1。结合排列熵组合分析方法,评价自动化机械设备运行状态的可靠性,得到相应的状态特征统计信息量为:
(23)
根据上述分析,采用关联特征检测方法提取自动化机械设备运行状态可靠性特征量,通过排列熵组合分析机制,实现自动化机械设备运行状态监测。
3 仿真实验分析
3.1 实验参数
为验证本文方法在实现自动化机械设备运行状态监测中的应用性能,进行仿真实验分析。设定自动化机械设备运行状态监测的样本组合数据为3组,每组数据的采样长度为1024,对自动化机械设备油膜振荡,动静件摩擦等运行状态进行实时监测,得到机械设备的运行状态采集数据时域分布如图1所示。

(a)A类运行状态

(b)B类运行状态
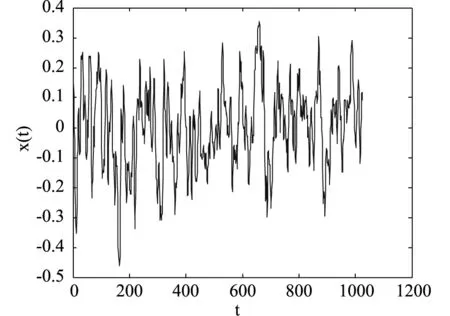
(c)C类运行状态图1 机械设备的运行状态采集数据时域分布
3.2 实验结果分析
3.2.1 不同方法监测排列熵分析
以图1的数据为研究对象,进行自动化机械设备运行状态监测,得到排列熵分布如图2所示。
(a)A类运行状态

(b)B类运行状态

(c)C类运行状态图2 机械设备的运行状态排列熵分布
分析图2可知,本文方法能有效实现机械设备的运行状态监测。
3.2.2 不同方法监测设备准确性分析
为了进一步验证本文方法监测的有效性,对比了本文方法、文献[3]方法以及文献[4]方法检测的准确性,对比结果如表1所示。

表1 不同方法监测机械设备运行状态准确性(%)
分析表1中数据可以看出,随着实验迭代次数增加,三种方法检测的准确性随之改变。当迭代次数为100时,本文方法的监测准确性为97.3%,文献[3]方法的监测准确性为84.3%,文献[4]方法的监测准确性为73.4%;当迭代次数为500时,本文方法的监测准确性为94.1%,文献[3]方法的监测准确性为91.4%,文献[4]方法的监测准确性为89.1%。可以看出本文方法进行机械设备的运行状态监测的准确性较高。
结语
本文提出的基于排列熵算法的自动化机械设备运行状态监测,将自动化机械设备状态进行重组,得到自动化机械设备运行状态的运维组分监序列;采用关联特征检测方法,提取自动化机械设备运行状态可靠性特征量,通过排列熵组合分析机制,实现自动化机械设备运行状态监测。实验结果表明:采用本文方法进行自动化机械设备运行状态监测的准确性最高可达97.3%,监测精度较高。