林用悬挂机具自动调平系统
2020-09-14刘瑞林
刘瑞林,毕 武,付 琼,王 石
(国家林业和草原局哈尔滨林业机械研究所,黑龙江 哈尔滨 150086)
自动调平系统最早应用于工业领域[1-2],由于社会发展的需要,自动调平系统已逐步应用到农业、林业等悬挂机具设备的相关领域中,传感器性能的不断提升大大提高了自动调平系统的适应性[3-4]。当前国内市场大多数农林悬挂机具设备仍是传统的手动调平模式[5],这种方式的悬挂机具设备不能做到随作业情况的变化而自动调平。农林作业中的悬挂机具设备如农用犁旋一体机、林业用葡萄冬剪机和旋耕机等常用悬挂机具设备作业时,拖拉机拖带机具车轮的一边在未耕作土地上而另一边车轮处于耕过的土地上,或是拖拉机在有倾斜的坡地作业时,会造成拖拉机与连接的悬挂机具之间产生倾角,拖拉机与悬挂机具之间产生的倾斜会影响平整度及等耕深作业指标和作业效率,这时为了保证作业效果,需要手动对机具进行调平,手动调评精度差、效率低。采用PLC控制的林用悬挂机具液压自动调平系统,可以有效地提高林用悬挂机具的作业机动性和作业效率。
1 调平系统工作原理
1.1 调平系统动力驱动结构方式
通常情况下,农林业悬挂机具设备的调平动力驱动机构,可以采用机电和液压两种不同的动力驱动方式[6]。机电驱动方式需要将电机作为控制执行器件,直接将电能转化为机械能,该驱动方式成本低、稳定性好,但承载能力不足,驱动力较小,不适用于大型设备,一般用在小型悬挂机具设备上;液压驱动方式需要将电能转化为液压能,再由液压能转化成机械能,该驱动方式有体积小、质量轻、驱动能力强、操作简单便于实现自动控制等特点,是比较常用的驱动方式,可用于大型设备中。
1.2 调平系统工作原理
悬挂机具调平系统可分为单边调平驱动和双边边调平驱动。单边调平驱动方式如图1所示,该方式调平结构简单,双边调平驱动方式如图2所示,该方式结构比较复杂,可根据具体情况进行选择。拖拉机上的悬挂机具转动机构与悬挂机具连接,悬挂机具由驱动机构驱动绕转动机构转动。除了悬挂机具转动,悬挂机具转动机构和拖拉机的连接视为刚性连接。悬挂机具横滚角传感系统安装在悬挂机具上实时测量拖拉机的横滚角,拖拉机田间作业时,悬挂机具与拖拉机一同产生倾斜,自动调平控制系统根据横滚角作出控制决策,驱动调平驱动机构调节悬挂机具与拖拉机的相对角度,使悬挂机具实时保持预期的作业角度[7]。
2 调平控制系统
2.1 电液调平系统组成
悬挂机具自动电液控制调平系统由信号采集、自动电液控制和执行机构组成,系统设计框图如图3所示。装有自动电液控制调平系统的悬挂机具在作业时,安装在悬挂机具架上的倾角传感器实时测量悬挂机具的倾斜角度,控制系统按照预设的角度范围对实时输入的角度值进行判断,当角度超出预设范围时,控制机电液压系统进行悬挂机具平衡位置的伸出与收缩,达到调平悬挂机具目的,直至角度调节到预设范围内,实现悬挂机具自动调平闭环控制,保持机具处于期望的预设角度范围内。

图1 单边调平驱动方式1.拖拉机;2.转动机构;3.倾角传感器;4悬挂机构;5.调平驱动机构
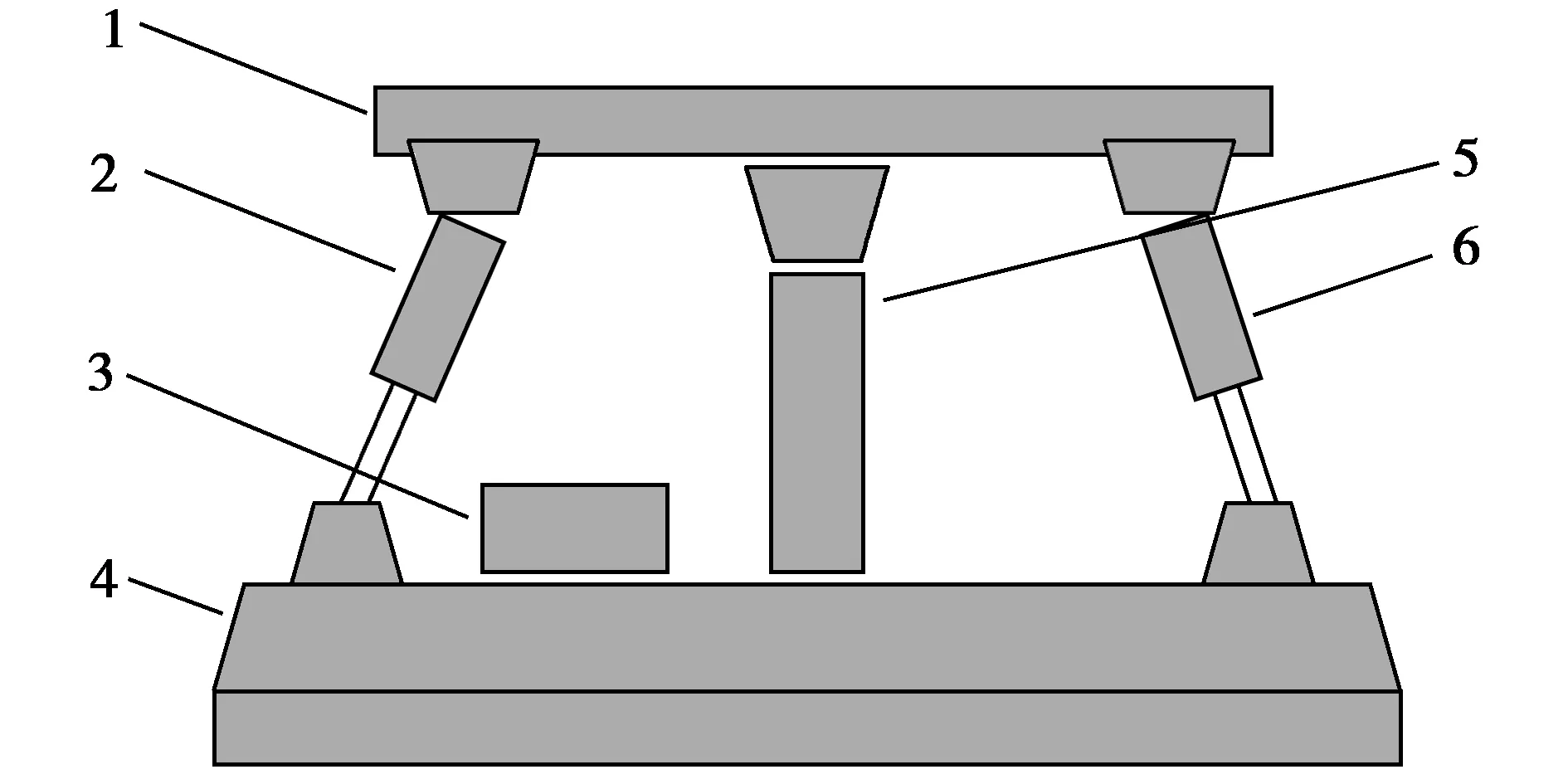
图2 双边调平驱动方式1.拖拉机;2.左调平驱动机构;3.倾角传感器;4.悬挂机构;5.转动机构;6.右调平驱动机构
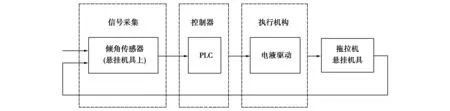
图3 悬挂机具电液调平控制系统框图
电液调平系统采用手自结合的控制模式,并设定最小调平角。悬挂机具正常作业时,倾角传感器采集悬挂机具倾斜数据送至PLC 控制器,控制器将信号与最小调平角相比较;当悬挂机具发生倾斜时,PLC控制器采用模糊PID自动调平闭环策略,控制驱动执行器件调整悬挂机具工作状态,使其减少倾斜度,直至角度调节到预设范围内,恢复水平作业状态,保持机具处于期望的预设角度范围内。
2.2 模糊PID控制器的工作原理
模糊自整定PID参数控制系统,能在控制过程中对不确定的条件、参数、延迟和干扰等因素进行检测分析[8],以常规PID控制器为基础,将采样的偏差值和偏差变化率作为模糊控制器的输入变量,利用模糊控制规则实时调整PID参数。悬挂机具调平模糊PID控制框图如图4所示。
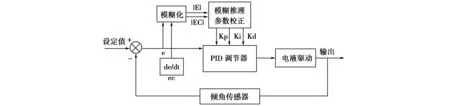
图4 悬挂机具调平模糊PID控制框图
2.3 模糊控制输入、输出变量及语言描述
一般可采用以误差e和误差变化率ec为输人语言变量、以Kp、Ki和Kd为输出语言变量的二输入三输出PID模糊控制器,以实际操作经验和技术知识为模糊控制核心,建立模糊规则控制表,从而得到PID参数整定的模糊控制规则。
各变量的模糊论域为:{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6};
各变量的语言值为:{NB,NM,NS,Z,PS,PM,PB}。
考虑到对论域的覆盖程度和灵敏度、稳定性与鲁棒性原则,各模糊子集采用三角形隶属函数[9],利用三角形隶属函数即可方便地求出输入语言变量的赋值。输入、输出变量隶属三角型对称分布形式如图5所示。
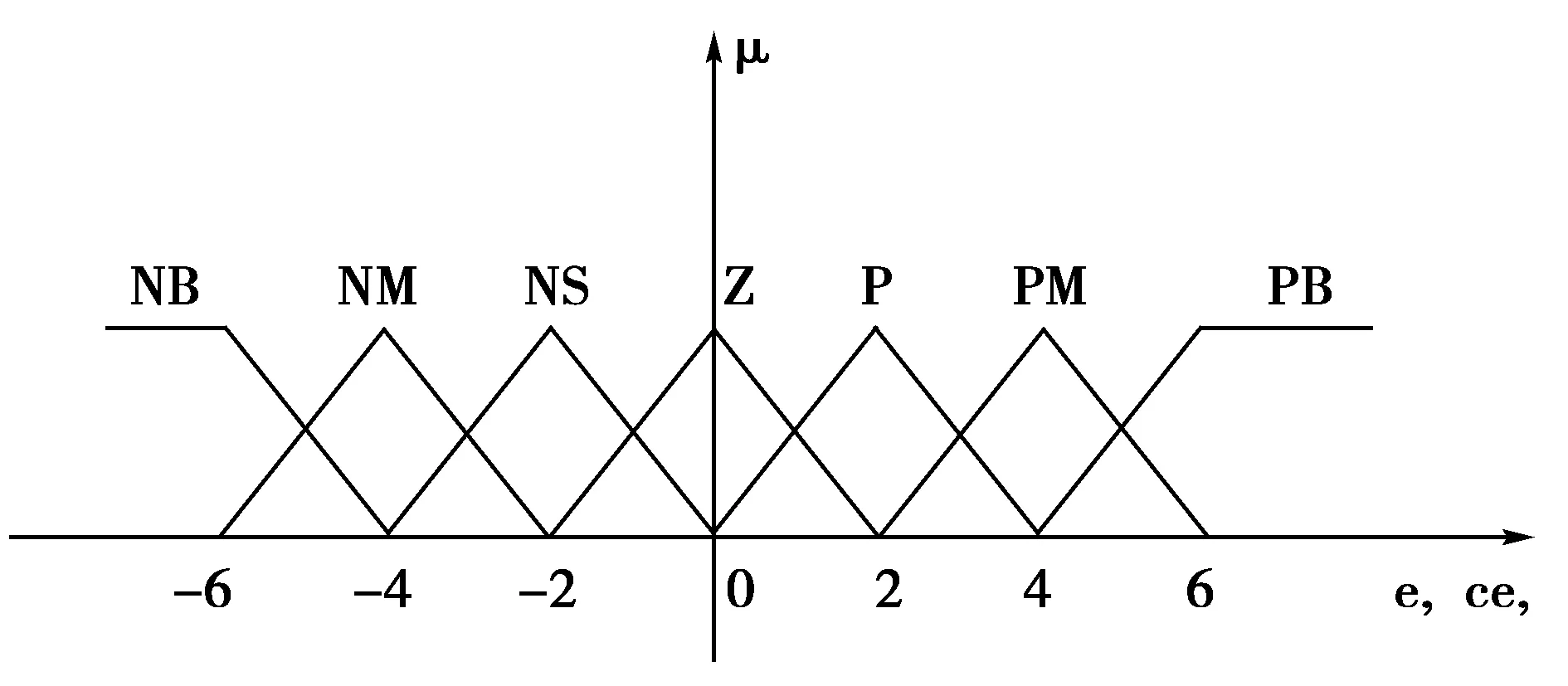
图5 输入、输出变量隶属三角型对称分布形式
考虑到PID控制的特点并通过合成推理,可得到一个模糊控制查询表,即模糊控制规则和输入语言变量赋值表。模糊控制规则表是模糊控制规则简化的表现形式,其实质是将控制经验加以总结后得到的一些模糊条件语句。这些模糊控制规则要能够保证控制器输出的动静态响应特性达到最佳的控制效果。模糊控制查询表见表1。
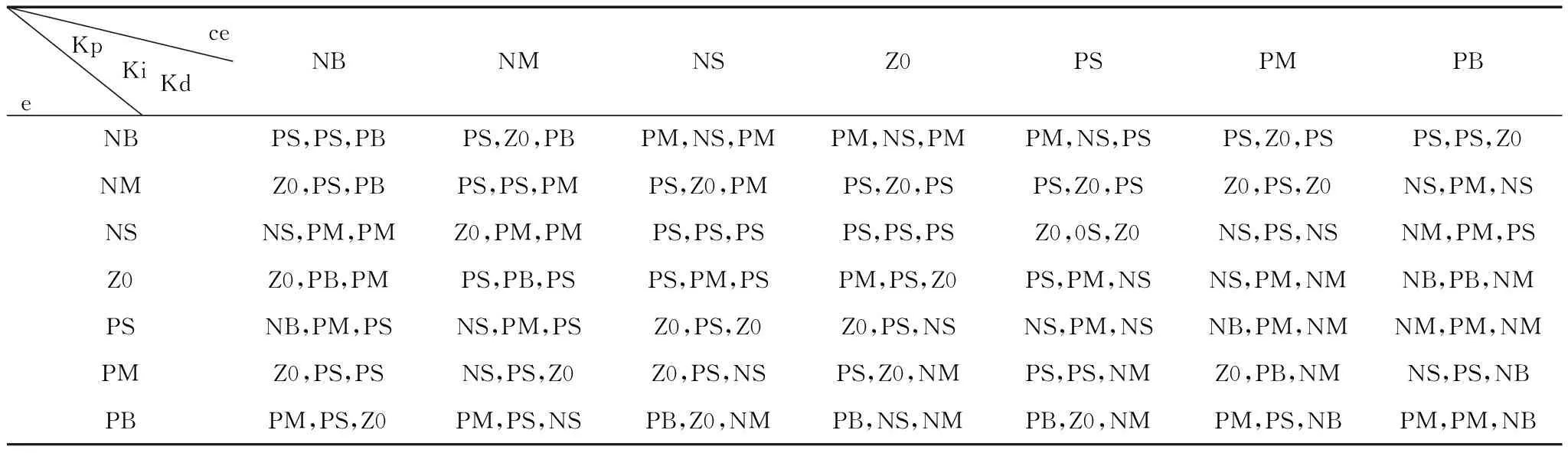
表1 模糊控制查询表
2.4 PLC的模糊PID程序设计
调平悬挂机具控制系统的模糊PID控制是一个两输入三输出的曼达尼系统,可视为两维输入、单个输出的三个子系统,分别求出PID的比例、微分、积分三个参数的模糊规则数值查询表,采用加权平均的方法得到Kp、Ki、Kd三个模糊控制变量查询表,用离散化的方式处理,将这三个参数查询表存放在PLC的共享数据块DB中。实际运行时,查表即可得到PID三个参数变化的模糊值,最后将模糊控制策略通过离线计算和在线查询的方式实现PID参数动态整定[10-13]。通过上述方法可实现调平悬挂机具控制系统的PLC模糊PID三个参数的实时动态整定。PLC模糊PID控制流程框图如图6所示。
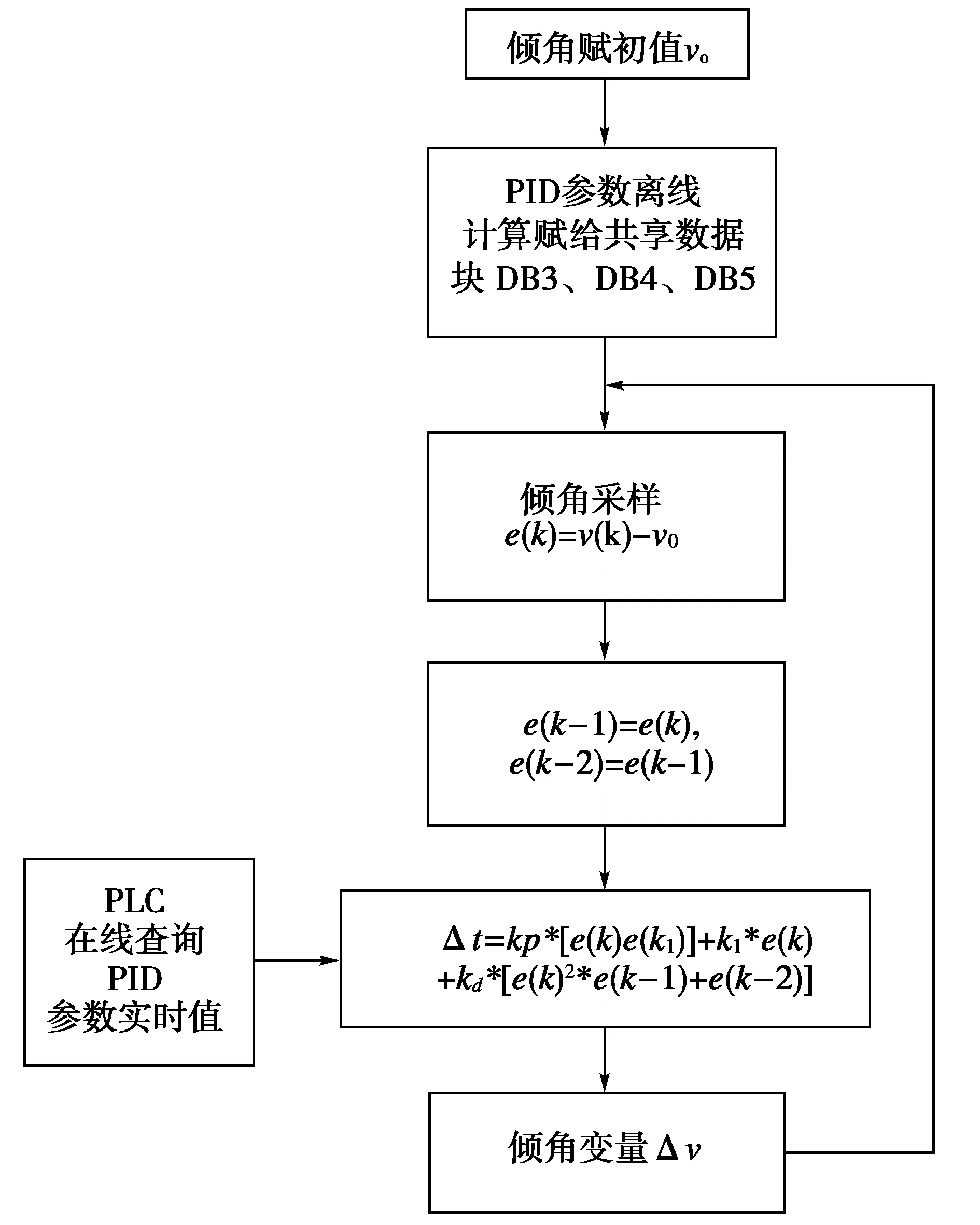
图6 PLC模糊PID控制流程框图
3 结束语
设计的农林业常用悬挂机具调平控制系统,根据悬挂机具自动调平控制的作业要求,确定了一种以PLC为控制器的PID模糊调平控制策略,实现了农林业常用悬挂机具自动调平控制。该控制方案可广泛应用于各种调平系统中,确保悬挂机具在预设的角度范围内作业,经试验验证达到了预期控制指标。此外,由于本系统采用了以PLC为控制器的策略,不仅比采用单片机控制的方法具有更好的可靠性,而且还有开发周期短、控制性能稳定等优点,推广使用可收到较好的经济效益和社会效益。
