Java3D虚拟现实技术下的机械臂运动仿真分析
2020-09-13任侠
任侠
摘要:在机器人中,机械臂为主要执行机构,对机械臂运动仿真进行分析具有重要意义。使用仿真技术实现参数设置、调试等工作能够提高效率,有效节约成本。目前,虚拟技术能够创建三维环境,并且和外界实时交互,被广泛应用到机械臂仿真领域中。以此,本文就对Java 3D虚拟现实技术背景下机械臂运动仿真进行分析。
关键词:Java3D虚拟现实技术;机械臂;运动仿真
虚拟现实VR在机器人系统中使用就是通过三维建模软件创建机器人和环境物体三维模型,使用三维图形仿真技术实现真实三维场景的创建,对机器人环境和本体进行几何建模,以此为机器人控制系统提供观察、研究的平台。利用虚拟仿真能够对机器人所达到空间范围、周围环境、运动状态的关系进行预知,降低实际运行意外事故,并且使运行效率得到提高。本文通过实验创建机械臂仿真系统,实现机械臂的运动仿真。
1 机械臂三维形体造型
Java3D为三维领域中Java语言的扩展,为纯粹面向对象结构。Java3D场景图为DAC,也就是具备方向性的不对称图形。三维形体为Java3D编程过程中的主要对象,包括三种方式生成需求三维形体:通过Java3D所提供用于编写点线面的类生成点线面对象;利用调用外部其他格式三维图形文件,实现复杂三维形体对象的生成;利用Utility生成形体geometry classes,Java3D具备基本形体和编写点线面对象应用,此可用在程序中创建简单形体,但是无法实现复杂形体。利用调用其他格式三维图形文件得到复杂形体,比如直接调用Lightwave格式与VRML2.0格式的三维图形文件,或者利用处理对DXF、DEG、3DS等格式三维图形文件,此格式三维模型能够在Ja-va3D程序中使用。
2 机械臂运动仿真的实现
2.1 遥操作VR系统结构
系统使用浏览器/服务器(BIS)模式,用户界面利用WWW浏览器实现,在前端实现部分事务逻辑,大部分在服务器端实现主要事务逻辑,在服务器中存储数据与应用程序,通过浏览器软件登录服务器实现客户端运行程序。服务器和机器人相互连接,机器人通过单片机进行控制,单片机利用串行口RS-232通信对数据发送和接收,对机械臂运动控制。
在浏览器客户端,浏览器对操作者提供文字、图像等提示信息的操作环境与良好界面,操作界面使用切换方式实现不同显示模式。在预显示模式中,虚拟机器人将机械臂各关节理想运行轨迹演示;在遥现模式中,操作员能够监控操作现场,并且实现意外误差诊断。
2.2 机械臂运动学建模
机械臂是通过一系列关节连接连杆构成,为了对末端执行器位姿描述,能够在每个连杆中固连的坐标系,对连杆坐标系关系进行描述。要想知道目标物体在第i个连杆坐标系中位置ip,物体在基坐标系中位置op的表达式为:
i-1Ai指的是第i个连杆相对于第i-1个连杆位姿。
以此表示,两杆之间位姿矩阵能够得到手部位姿矩阵,并且和两杆的结构参数、运动参数、运动方式相关。每个连杆都通过四个变量进行描述,连杆长度为ai,连杆转角为ai,关节角为θi,连杆偏距为di。
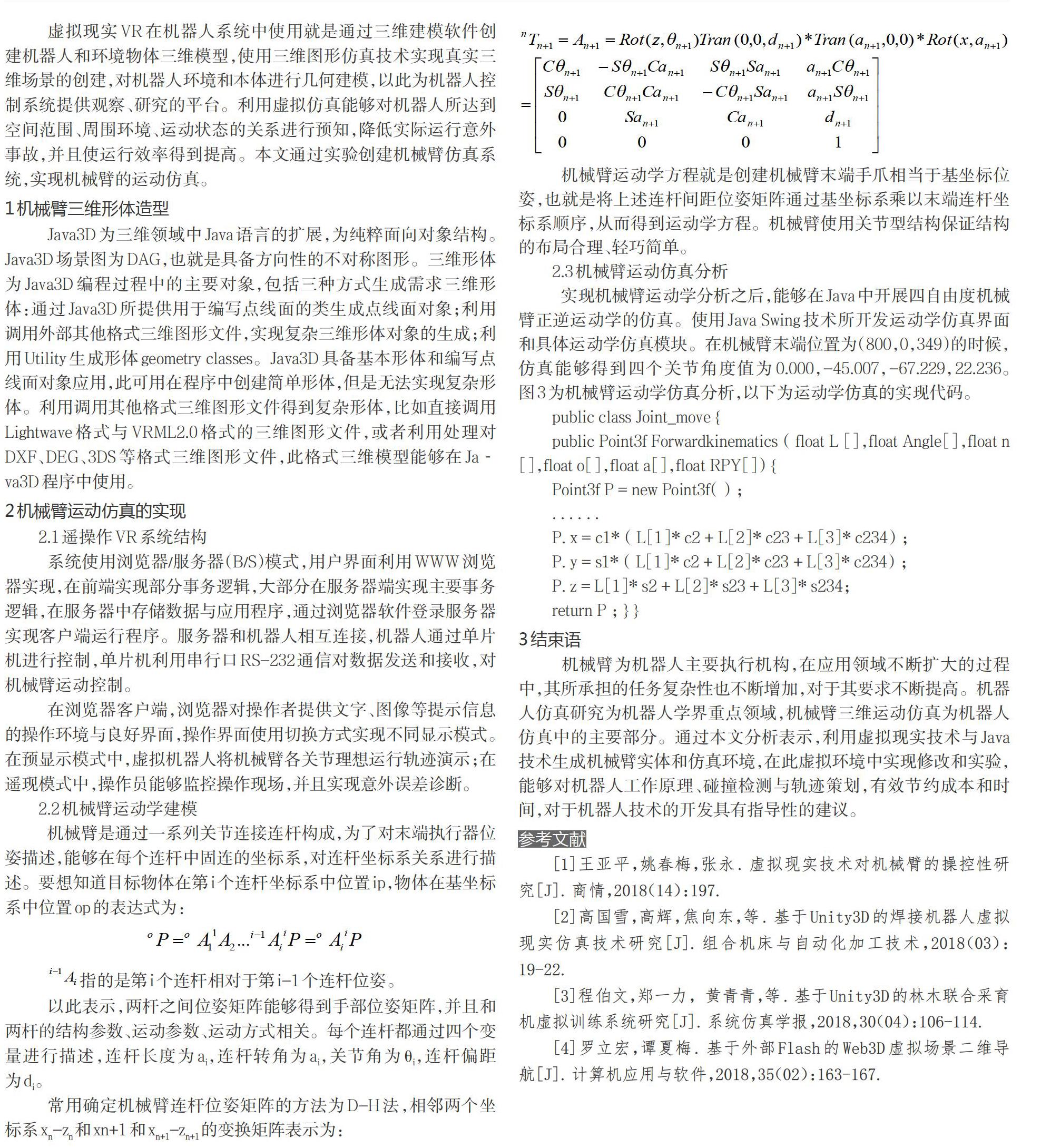
常用确定机械臂连杆位姿矩阵的方法为D-H法,相邻两个坐标系Xn-zn和xn+1和xn+1-zn+1的变换矩阵表示为:
机械臂运动学方程就是创建机械臂末端手爪相当于基坐标位姿,也就是将上述连杆间距位姿矩阵通过基坐标系乘以末端连杆坐标系顺序,从而得到运动学方程。机械臂使用关节型结构保证结构的布局合理、轻巧简单。
2.3 机械臂运动仿真分析
实现机械臂运动学分析之后,能够在Java中开展四自由度机械臂正逆运动学的仿真。使用Java Swing技术所开发运动学仿真界面和具体运动学仿真模块。在机械臂末端位置为(800,0,349)的时候,仿真能够得到四个关节角度值为0.000,-45.007,-67.229,22.236。图3为机械臂运动学仿真分析,以下为运动学仿真的实现代码。
public class Joint_move{
public Point3f Forwardkinematics(float L[],float Angle[],float n[],float o[],float a[],float RPY[]){
Point3f P=new Point3f();
P.x=c1*(L[1]*c2+L[2]*c23+L[3]*c234);
P.y=s1*(L[1]*c2+L[2]*c23+L[3]*c234);
P.z=L[1]*s2+L[2]*s23+L[3]*s234;
return P;}}
3 结束语
机械臂为机器人主要执行机构,在应用领域不断扩大的过程中,其所承担的任务复杂性也不断增加,对于其要求不断提高。机器人仿真研究为机器人学界重点领域,机械臂三维运动仿真为机器人仿真中的主要部分。通过本文分析表示,利用虚拟现实技术与Java技术生成机械臂实体和仿真环境,在此虚拟环境中实现修改和实验,能够对机器人工作原理、碰撞检测与轨迹策划,有效节约成本和时间,对于机器人技术的开发具有指导性的建议。
参考文献
[1]王亚平,姚春梅,张永.虚拟现实技术对机械臂的操控性研究[J].商情,2018(14):197.
[2]高国雪,高辉,焦向东,等.墓于 Unity3D的焊接机器人虚拟现实仿真技术研究[J].组合机床与自动化加工技术,2018(03):19-22.
[3]程伯文,郑一力,黄青青,等.基于Unity3D的林木联合采育机虚拟训练系统研究[J].系统仿真学报,2018,30(04):106-114.
[4]罗立宏,谭夏梅.基于外部Flash的Web3D虛拟场景二维导航[J].计算机应用与软件,2018,35(02):163-167.
