一种太阳能光伏板清扫机器人的设计
2020-09-12侯凡博姬鹏飞张修太王程阳
侯凡博 姬鹏飞 张修太 王程阳
摘 要: 针对光伏板表面的积灰情况和清扫特点,设计了一种智能清扫机器人。该清扫机器人以STC51单片机为控制核心,按照清扫工序顺序动作,在光伏板表面进行自动清扫和吸尘。经过仿真实验,该清扫机器人能够自主完成对光伏组件的智能清洁,满足光伏电站实际应用需求。
关键词: 光伏板;清扫机器人;智能
1 绪论
随着传统不可再生能源的逐渐减少,能源危机问题日益突出。光伏发电作为主要绿色能源之一,越来越多的得到应用,太阳能发电的规模也达到了前所未有的程度。然而在实际使用过程中,空气中的微小颗粒容易积聚在光伏板表面形成积灰,导致光伏组件发电效率降低,同时也会给光伏企业带来巨大的经济损失。因此,太阳能光伏板的清洁成了新的研究课题。
传统的清洁方式以人工擦拭和清水清洗为主,效率较低且成本较高,而且受到环境和地域限制。近年来,国内外已经研发出了一些用于光伏板清洗的机器人,如以色列开发的机器人Ecoppia E4和日本未来机械公司研制的太阳能电池板清扫机器人,虽然都可以应用于太阳能光伏板的清扫,但是价格昂贵,普及型不高[1]。国内开发的车载式清扫机器人利用滚刷和吸尘系统对光伏组件进行无水清洗,不利于山区或沙漠地区使用。
针对目前存在的问题,本文设计了一种太阳能光伏板清扫机器人。该清扫机器人是一种智能化的光伏电池板清扫装置,可实现对光伏板表面灰尘自动清扫,功能集成性好、工作效率高,能有效应用于多种光伏发电场所。
2 系统的整体设计
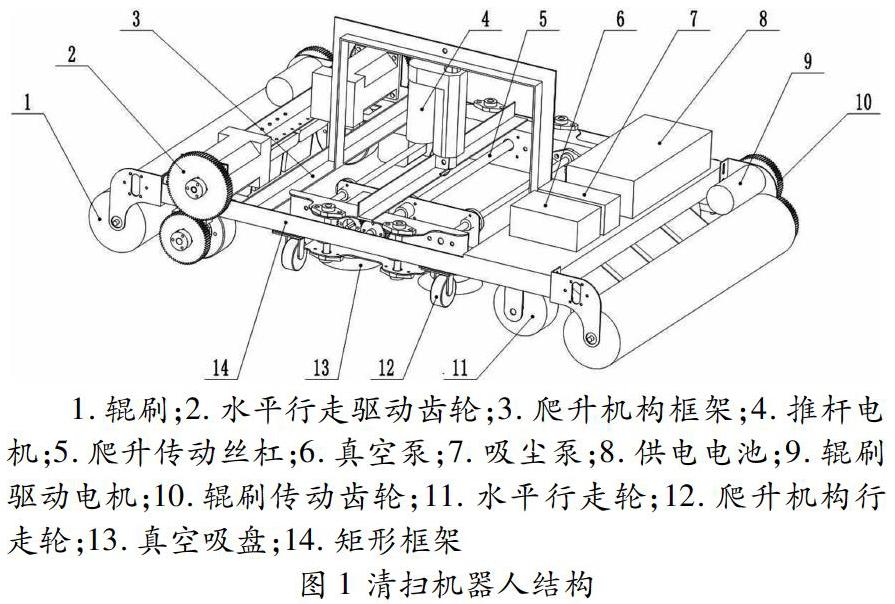
本文设计的清扫机器人结构主要包括:矩形框架、行走机构、爬升机构、清扫机构。矩形框架用于支撐整个机器人的形状,为各种机构提高安装位置。其结构示意图如图1所示。
具体工作过程是:行走机构带动清扫机器人在光伏组件上沿水平方向向前行走,行走的同时由清扫机构对光伏板表面进行清扫;当走到光伏组件尽头时,位置传感器检测到光伏组件边缘,机器人停止前进和清扫,由爬升机构将机器人向上提升一个工位;向上爬行结束后,机器人会朝反方向水平前进,前进的同时光伏板表面进行清扫;当走到光伏组件另一侧边缘时,再次停止前进和清扫,向上爬升一个工位[2]。整个过程可以分为水平行走、清扫和爬升三个部分,整个清扫过程都是这三个部分的循环。整个光伏组件清扫完毕或电量过低时,机器人会回到初始位置。整个工作过程示意图如图2所示。
3 清扫机器人控制系统硬件设计
清扫机器人的各项功能需要控制系统的统一协调和调配下才能顺利完成。根据清扫机器人所需实现的功能,控制系统的总体结构如图3所示:
运动控制系统硬件平台主要有微控制器、步进电机、步进电机驱动电路、传感器、直流电机、电源等组成。
3.1 控制模块
选用STC51单片机作为主控芯片,通过单片机的PWM脉宽调制对步进电机进行控制,实现行走、爬升和清扫部分的功能,并利用感知部分的信号作为控制的反馈信号和控制信号。STC51单片机正常工作需要复位电路和晶振电路构成单片机最小系统,如图4所示。
单片机下载程序时采用内部UART实现串口通信,单片机正常工作时采用蓝牙通信与手机端APP进行通信,如图5所示。
3.2 行走模块
由2个步进电机和2个步进电机驱动器构成。驱动器接收到单片机的控制指令,驱动步进电机,实现清扫机器人的水平行走,如图6所示。
3.3 爬升模块
由1个步进电机、1个步进电机驱动器、1个推杆升降电机、2个吸盘和1个真空泵构成。当需要进行爬升时,推杆升降电机向下运动,将吸盘接触到光伏板表面的同时,矩形框架被整体提升悬空,随后真空泵开始抽气,吸盘会牢牢固定在光伏板表面,爬行步进电机转动实现清扫机器人的横向移动,控制电路如图7、8、9所示。
3.4 清扫模块
由2个直流电机和一个吸尘泵构成。每个电机带动一个清扫毛辊,在清扫机器人向前行走时进行光伏表面的清扫,同时吸尘泵开始工作,将灰尘吸进收纳装置。
3.5 感知部分
由接近开关、光电开关、编码器等构成。单片机通过读取传感器、编码器的状态和数据,实现清扫机器人在行走和爬升过程中位置的精确控制[3]。
3.6 电源部分
选取24V锂电池作为整个系统的电源,通过电压转换实现5V电压输入。
4 清扫机器人控制系统软件设计
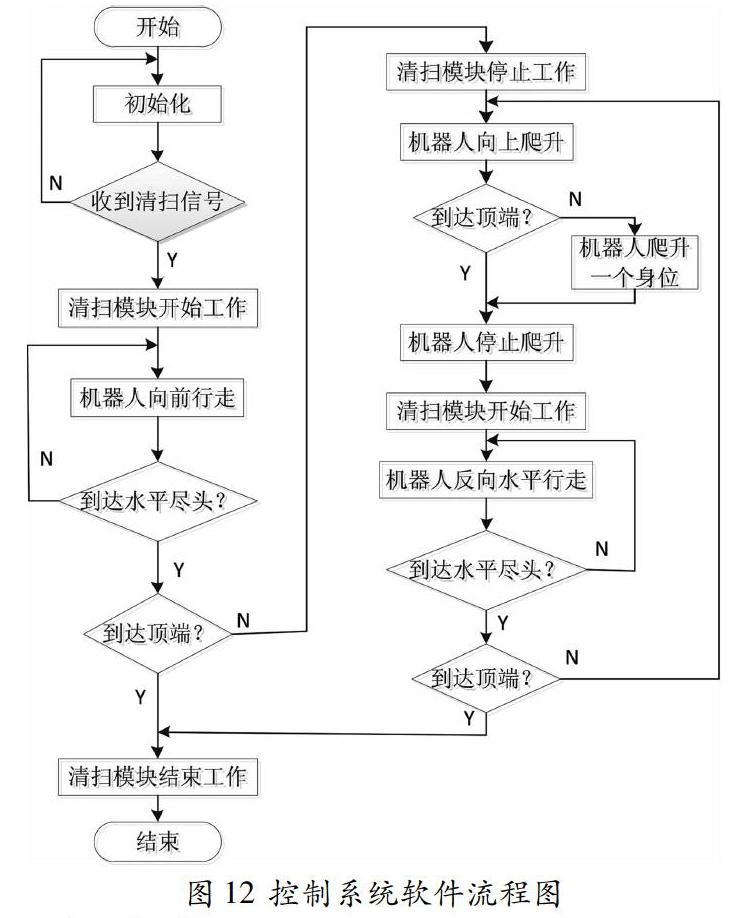
根据清扫工作流程和硬件电路开发控制程序。控制程序系统流程如图12所示:
5 现场运行分析
为了验证系统的可行性和合理性,分别在实验室和学校屋顶光伏阵列进行了运行试验。现场运行表明,本文所设计的清扫机器人能够在整个光伏阵列实现自动清扫,清扫范围能够覆盖整个光伏阵列,清扫效果理想。同时,机器人可在晚间工作,会光伏板白天发电影响更小。整体样机如下:
6 结论
本论文从实际应用出发,研究设计了一种智能清扫机器人,用于对光伏组件表面的积灰进行清扫[4]。该清扫机器人具有自动清扫、爬升、避障、路径规划等功能,可完成光伏组件表面自动清扫。仿真及现场实验运行结果均表明,该清扫机器人清扫效果良好,可有效降低人力成本,提高清扫效率,可应用于大规模光伏电站。
参考文献:
[1]顾曙光.一种太阳能电池板全天候移动清洗装置的研制[D].苏州大学,2015.
[2]于晨.光伏面板清扫机器人关键技术研究与设计实现[D].山东大学,2018.
[3]李园,赵熙,汪贵平.光伏电池板智能清洁系统[J].自动化与仪表,2018,33(10):41-44+98.
[4]王军.光伏组件清扫机器人运动控制系统设计与研究[D].安徽大学,2016.
项目来源: 安阳市科技攻关项目-光伏发电站太阳能电池板清扫机器人(40088902)
