基于机器视觉的工业机器人分拣技术实践
2020-09-12陈帅华
陈帅华
(重庆城市职业学院信息与智能工程系 重庆 402160)
目前,国外对机器人本体的研究已经相当成熟,具有运动速度快和控制精度高的特点。现在机器人的外围设备是研究的热点,将视觉传感器或触觉传感器和机器人本体相结合,配备以功能强大的应用软件程序,可实现机器人的智能化控制。对于分拣机器人来说,现有的配套视觉软件可以引导机器人进行准确快速的分拣作业,但是关于应用软件涉及到的核心技术属于商业机密,仍然处于严格保密状态。
国内很多学者针对分拣作业中的具体问题进行深入研究。例如,针对分拣工作环境恶劣的情况下,如何避免粉尘对摄像机的干扰;针对分拣中图像准确识别问题进行细致研究,从而提高分拣的准确率;针对传送带上目标坐标点的预测及获取进行分析,为能够快速分拣提供必要前提;针对特定分拣目标进行专一化的分拣设计。
一、机器视觉下的机器人分拣系统构建
为了探讨机器人分拣技术,现以广数机器人为例,基于机器人视觉构建一个机器人分拣系统,并对该系统在相机静止-目标静止,相机静止-目标运动两种情况下的运行情况[1]。
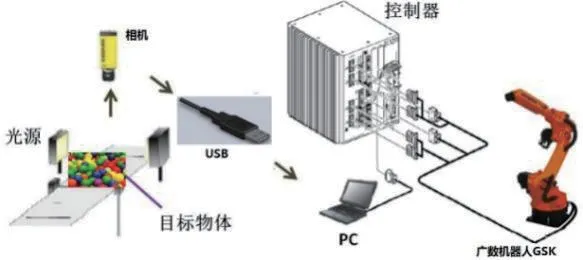
图1 视觉分拣机器人系统示意图
(一)机器人分拣系统的构成
基于机器视觉的工业机器人分拣系统的总体方案,机器人分拣系统由五个单元构成,分别为工作平台单元、视觉分拣单元、摄像机平台单元、机器人RC单元以及机器人机械手抓单元等五个部分。图像处理的作用是对相机拍摄到的外界图像进行预处理,提取图像中的某些特征,并根据这些特征来确定出联通成分的中心坐标;相机标定的作用是为系统建立一个图像坐标系与机器人坐标系,并以此来研究二者之间的关系[2];模式识别需以图像作基础,对图像及图像中的联通成分进行识别、分类;机器人控制是最后步骤,控制的实现方法是在计算机和机器人之间建立一个连接通信。

图2 机器视觉的工业机器人分拣系统
视觉分拣单元由PC机和视觉软件组成。主要是由视觉系统对摄像机采集的视频序列识别目标种类。再计算出工件的中心和摆放的方向。最后要根据图像坐标系和物体坐标系的关系,经过计算目标的相对位置和方向,将信息参数传入控制柜中。
(二)相机的标定
广数工业机器人控制柜提供RJ45 接口,PC机与工业机器人控制柜通过网线连接,工业摄像机通过USB与PC机连接。机器人示教盒用于对工业机器人进行编程。系统包括两个子系统:工业机器人控制系统,视觉系统。视觉系统包括:工业摄像机,PC,分拣工作平台[3]。
摄像机标定的方法分为两大类,一类是传统的摄像机标定方法,另一类是摄像机自标定方法。传统的摄像机标定方法比较简单,使用待标定的摄像机拍摄已知形状.尺寸的标定模板,标定模板可以为棋盘格模板、网格纸模板等。通过已知位置的图像点与空间点解算出标定模型中的未知参数,从而完成摄像机的标定。自标定方法不需要使用特定的靶标,以场景中位置未知的点作为参考点,摄像机通过特定的运动获得场景点图像,从而完成摄像机的标定。
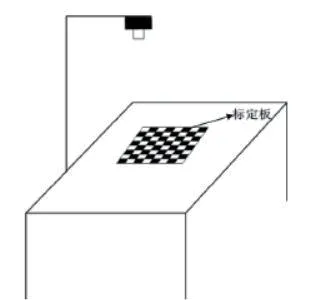
图3 相机采集标定靶标图
机器人分拣中,通过对相机标定结果的分析,可准确判定目标在机器人坐标系中所处的位置,为机器人的分拣和抓取动作奠定基础[4]。
(三)分拣实现过程
首先对目标工件进行图像预处理和特征提取,然后利用图像矩特征完成对神经网络的训练,最后引入算法对基于神经网络的分类器进行性能优化。识别算法,最后通过工件识别实验证实了改进后的神经网络分类器具有较高的识别准确率。通过标准D-H参数法建立华数机器人的运动学模型,分析运动学逆解的求取方法和选取标准。同时详细分析机器人关节转角和末端执行器位置之间的关系,得到基于最优抓取点的分拣策略[5]。最后在视觉分拣实验平台上完成了工件分拣作业。

图4 图像采集过程示意图
工业机器人分拣流程如下图5所示。分拣流程分为四个部分:图像预处理、目标提取、目标分析、分拣抓取。
分拣具体流程为:1.图像预处理:对采集到的图像进行图像平滑去除噪,消除噪声对图像的干扰。2.目标提取:使用Canny算子进行二值化,其目的是将目标图像从背景图像提取出来。3.单一目标分析:由于目标是规则的几何工件,仅靠角点检测是检测不出来圆形的,所以需要Hough圆检测来辅助识别。4.分类抓取:对每个单--工件目标求取特征点,求取其目标工件的中心和长短轴[6]。

图5 系统分拣的流程图
二、结束语
机器人分拣系统代替人工分拣,具有成本低、效率高的特点。本文介绍搭建了基于机器视觉的工业机器人分拣系统,分析了工业机器人的分拣系统的组成及分拣实现的过程。最后在视觉分拣实验平台上进行了对目标工件的抓取实验,验证了所设计的工业机器人视觉分拣系统的可行性。