基于运动仿真的标记器和传感器在内燃机曲柄连杆机构中应用的研究
2020-09-10陈庚
陈庚


摘要:介绍UG10.0运动仿真中标记器和传感器的特点,结合内燃机曲柄连杆机构运动的机理,利用if函数模拟内燃机曲柄连杆机构的加速运动和定速巡航运动,为现实复杂的内燃机运动提供可靠运动形式的依据。
Abstract: This content introduces the characteristics of marker and sensor in UG 10.0 motion simulation. Combining with the combustion engine about the mechanism of movement of crank-connecting rod, uses if function to simulate the accelerated motion and constant speed cruise motion of crank-connecting rod in the combustion engine, in order to provide a reliable basis for complex motion of combustion engine in reality.
关键词:运动仿真;标记器;传感器; if函数
Key words: motion simulator;marker;sensor;if function
0 引言
近年来运动仿真技术[1]在汽车、航天、模具等各个领域的应用越来越广泛,可以模拟复杂的运动过程,以减少样机的数量,节约成本,减少周期,实现公司利益的最大的化。運动仿真中的传感器[2]起到了至关重要的作用,如汽车与传感器[3,4],可以对汽车的行驶速度、行驶距离、发动机旋转速度、防抱死装置、电子变速控制装置等;传感器在机器人上的应用,要使机器人和人的功能更为接近,通过对物体产生的压觉、力觉、滑动感觉和重力感觉,来从事更高级的工作。本文以内燃机[5]为例,利用标记器和传感器,研究其复杂的运动过程。
1 标记器和传感器的特点
标记器是我们定义在连杆上的一些坐标系,用来标记一些点的位置。具有的特点:①记录下连杆上某个点的位移、速度或者加速度;②测量点的接触力、弹簧的行程、衬套的屈曲以及其它的动态因子;③监测运动物体的位置。
传感器可以捕捉绝对或者相对的运动结果数据(位移、速度、加速度或者力)。其特点:①可以在一个标记器或者运动副上或者相对其它的移动的或者固定的标记器;②可以使用于一个函数中;③可以直接打印成图表;④可以使用一个闭环信号图表来控制电机的电压。例如位移传感器可以监测两个标记器的线性距离,当标记器进入指定距离后,传感器被触发,然后会发出一个新的电压信号给电机。综合标记器和传感器的特点来看,标记器一般要配合传感器使用。
2 if函数的特点及应用
运动仿真中的if函数:IF(Expression1: Expression2, Expression3, Expression4)
其含义:
If the value of Expression1<0,IF calculates and returns the value of Expression2.
If the value of Expression1=0,IF calculates and returns the value of Expression3.
If the value of Expression1>0,IF calculates and returns the value of Expression4.
If函数即为如果函数,Expression1是自变量,Expression2, Expression3, Expression4是结果值。如果自变量小于零,结果取2;如果自变量等于零,结果取3;如果自变量大于零,结果取4。
3 内燃机曲柄连杆机构[6,7]
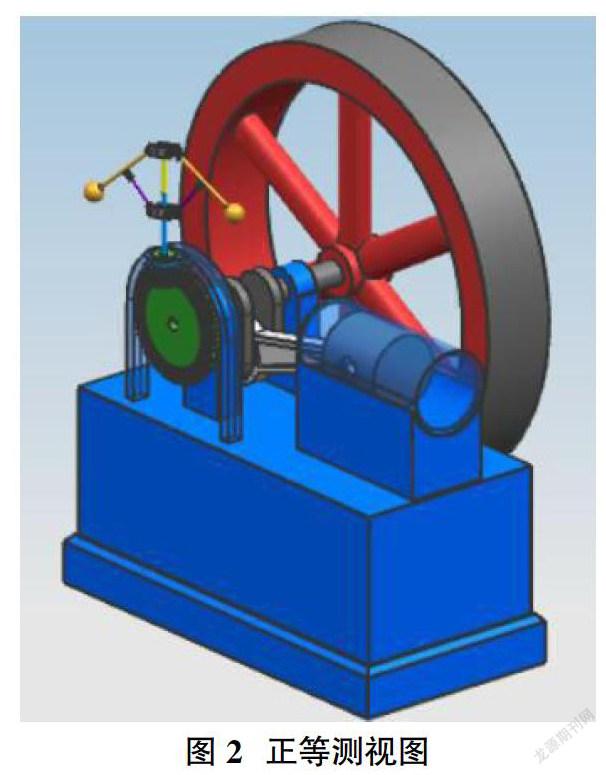
内燃机的原动力是燃料,通过燃料的点燃,产生瞬间的爆发力,为曲柄连杆机构提供动力[8],由于运动缸里的活塞在燃料点燃时运动快,恢复时运动慢,需要用到if函数,因为复杂的往复运动,最终输出的运动如何,需要配合标记器和传感器来研究。内燃机曲柄连杆机构的主视图和正等测视图如图1-图2。
通过活塞的运动输出速度,并结合两个小球的运动,来观察最终运动的形式。
4 实现加速运动
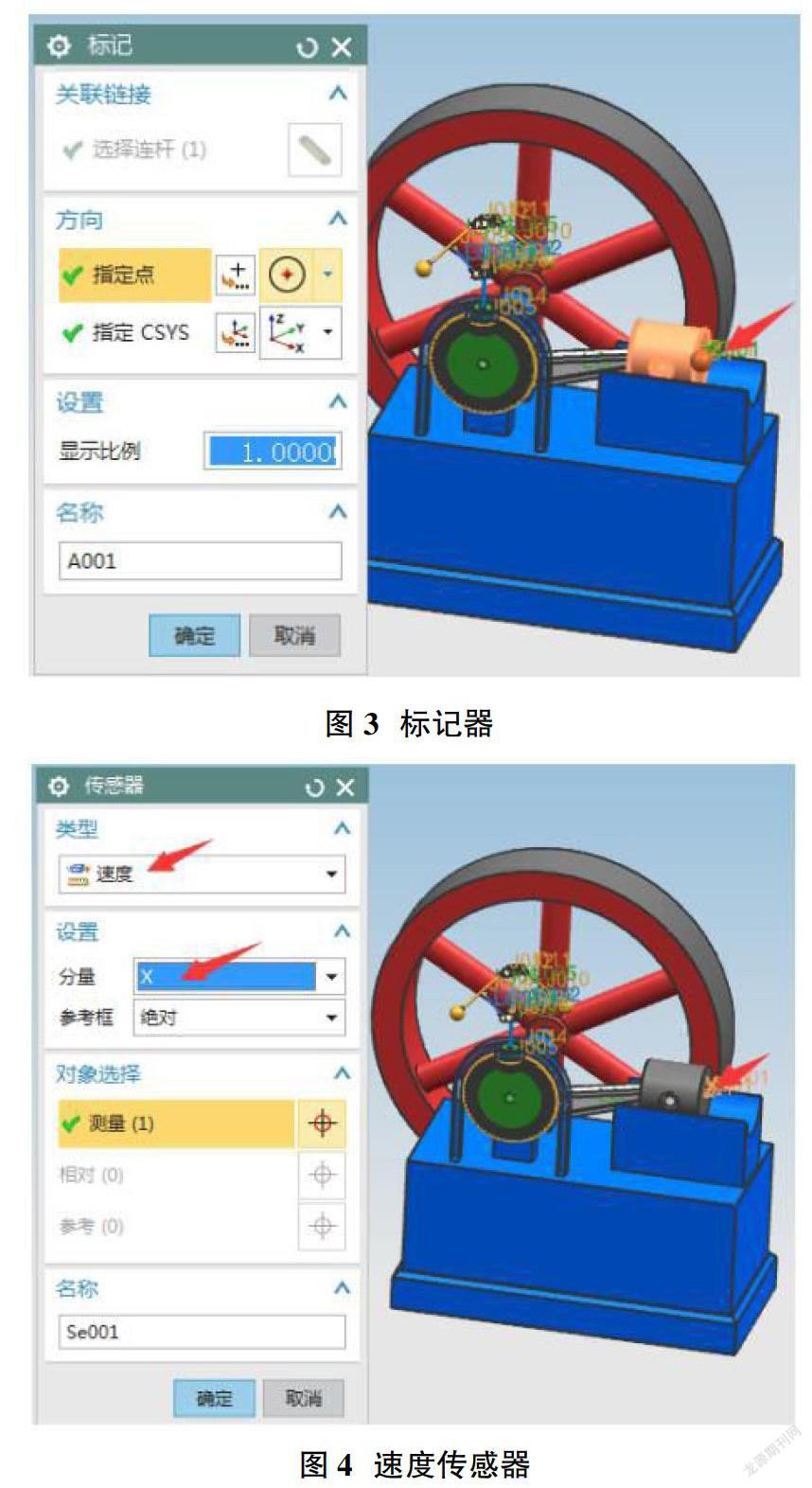
为了研究活塞的速度,需要用标记器来标记,在燃料与活塞的接触面来标记,产生xyz坐标系,如图3,并配合使用传感器,输出x方向的速度,如图4。
给该位置一个矢量力,如图5,采用if函数,如图6。
If函数的自变量是标记的传感器在x方向的速度,从图中可以看出,x的正方向向右(即向前),负方向向左(即向后)。由内燃机的机理可知,当活塞向x的正方向运动时,靠的是曲柄连杆的惯性力,属于If the value of Expression1>0,IF calculates and returns the value of Expression4.这种情况,所以e3为0;当活塞向x的负方向运动时,靠的是燃料的爆发力,属于 If the value of Expression1<0,IF calculates and returns the value of Expression2.属于这种情况,所以e2有力,给100N。结果如图7。
此时if函数的意思是传感器在x的负方向,加力;在x的正方向没有力。通过Solution解算,看内燃机曲柄连杆机构的运动过程,可以看出,在刚开始时,力不够,曲柄不能周转,在if函数的作用下, x的负方向继续加力,曲柄的可以实现周转,且速度原来越快,小球的张角也是越来越大。为了监测运动仿真的真实性,输出图表来观察。如图8。
从图表中可以看出刚开始时,速度的变化不稳定,后来进行加速运动。传感器可以直接输出图标,来观察运动过程。
5 实现定速巡航运动
该装置的终极目标是实现定速巡航,速度达到一定时,保持不变,从小球的位置来看,即小球的张角达到了某一位置。此时便可以使用小球的高度位置进行传感标记,当小球的位置低于某一位置时,活塞端需要给力;当小球位置等于某一位置时,活塞端不需要给力;当小球位置大于某一位置时,活塞端也不需要给力。所以该位置需要给if的套现函数来实现。
采用标记器标记此时的位置,并利用投影测量该位置距离转轴中心的距离为250mm,用传感器检测该位置的位移。此时if函数的自变量是该位置与250mm的差值,当自变量小于零时,活塞端需要给力,即活塞端传感器if函数;当自变量等于零和大于零时,不要给任何力,即为0,如图10。可以实现定速巡航的运动,如图11。
为了更加清楚的表达活塞的运动形式,采用图表直接输出,可以看出速度刚开始不稳定,慢慢加速,最后定速,实现了定速巡航的运动,如图12。
6 总结
UG NX软件中的运动仿真模块,为现实生活中的复杂运动提供了可靠的依据。而标记器和传感器的配合使用,更加逼真地模拟真实的运动过程。
①了解标记器和传感器的特点和使用方法;②认识if函数并学习如何使用该函数,以及它的套现函数;③利用标记器和传感器,并结合if函数,实现内燃机曲柄机构的加速运动和定速巡航运动。
参考文献:
[1]李锐.基于UG的机构运动仿真和分析[J].机械工程与自动化,2010(5):44-45,48.
[2]安培成.浅析传感器技术在机电一体化系统中的应用[J].内燃机与配件2018(01):82-83.
[3]陈玉.传感器技术在无人驾驶汽车中的应用研究[J].电子测试,2017(21):81-83.
[4]徐鹏越.传感器在汽车测速中的应用 [J].中国新通信, 2018,20(01):221-222.
[5]于振华.基于UG软件平台的四杆机构运动仿真分析[J].机械研究与应用,2010,23(1):10-11.
[6]张启城.基于内燃机曲柄连杆的设计及动力学分析[J].内燃机与配件,2018(19):27-28.
[7]马炳杰,张欢,王志刚.内燃機曲柄连杆机构冲击动力学分析[J].石家庄铁道大学学报(自然科学版),2013(02):32-35.
[8]侯凤国,田杨.基于Workbench的某牛头刨床运动学分析[J].机械制造与自动化,2012,41(3):77-78.