高空间分辨率动态影响线自动测量技术研究
2020-09-10段敏宋刚邢春超
段敏 宋刚 邢春超

摘 要:本文提出了一种高空间分辨率的动态影响线自动测量技术,有效解决传统影响线测量方式需中断交通的问题。基于高精度动态车辆定位系统,结合健康监测系统动态模式下监测数据,自动提取与匹配挠度和应变等动态响应测量数据。实桥测试结果表明,系统可以有效完成高空间分辨率动态影响线自动测量。
关键词:影响线;高空间分辨率;自动测量;健康监测系统
桥梁是交通建设中的关键性枢纽,是国家经济和社会发展的重要基础设施。随着使用年限的推移,受外界环境、材料老化以及疲劳效应等将导致桥梁结构出现损伤积累和性能劣化。传统评定方法在量大面广的中小桥的快速评定具有一定局限性[1],专家评定法需要汇总不同专家意见不适用于中小桥梁,传统荷载试验耗时费力,需长时间中断交通,基于健康监测的评定方法需要一定海量数据分析与处理能力,可靠度分析法中影響可靠度的因素较为复杂,各个因素间相互影响。随着桥梁健康监测系统建设,桥梁已布设多种监测传感器,如何快速有效的利用已有监测传感器对桥梁承载能力进行评估具有重要的研究价值,基于影响线的桥梁承载能力快速评估技术成为研究热点。唐等[2-3]针对基于影响线的桥梁结构评定理论的研究进展进行阐述。王等[4]通过对已知标定车辆过桥产生的桥梁动应变响应进行反演计算得到相应测点的应变影响线,实现桥梁影响线动态测试。吴[5]研究了基于实测位移影响线的桥梁结构损伤识别方法,提供了一种智能化方法和技术手段。余[6]针对基于影响线的评定方法的研究现状和技术瓶颈,提出了一种能够在不封闭交通的情况下获得桥梁影响线,并根据影响线变化快速评定桥梁安全的方法。邹[7]利用通用有限元软件ANSYS阐述基于实测影响线的中小跨径梁桥承载力快速评定的过程,并进行实桥测试。
传统准静态加载方式,需要中断交通,测量需要反复架设仪器设备,耗费较大人力物力。本文提出了一种高空间分辨率动态影响线自动测量技术,不需要中断交通,通过动态加载车辆的高精度定位数据,结合健康监测系统测量的结构响应数据,自动完成影响线的测量与提取。该方法可快速重复测量影响线,无需现场重复部署设备,有效降低人力成本,可大大提高影响线测量频次,为桥梁状态评估提供有效支撑。
1 系统架构
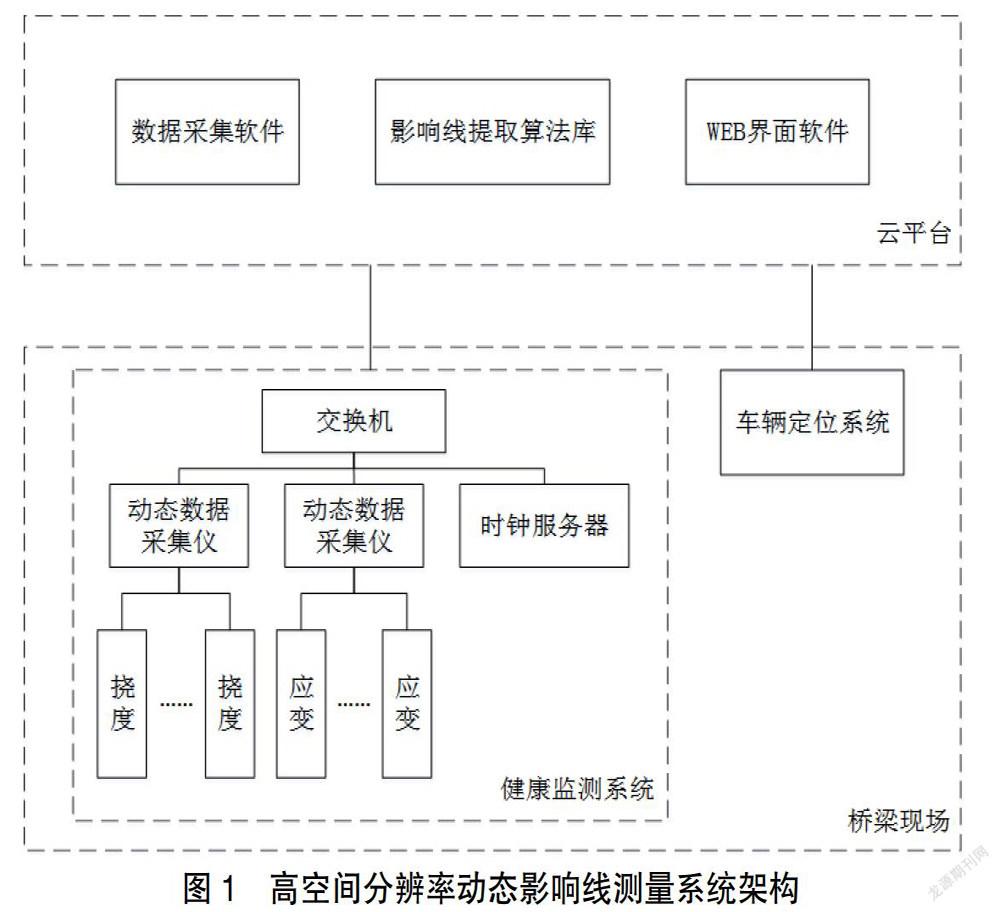
高空间分辨率动态影响线测量的关键在于荷载车辆定位、数据动态同步采集。系统引入云平台技术,采用二级架构体系,分为桥梁现场层以及云平台层。系统架构如图1所示。
系统工作流程设计如下:
Step 1:标准车辆加载并进行称重,重量记为;
Step 2:标准车在前轴正上方部署车辆定位系统,标定伸缩缝位置;
Step 3:平台录入车辆重量信息与伸缩缝位置;
Step 4:标准车进行跑车试验,平台自动控制系统工作模式,并将采集数据自动上传至云平台;
Step 5:影响线自动分析计算与提取。
2 车辆定位系统
车辆动态定位精度是影响线准确提取的关键因素之一。国内外针对车辆定位方法已有广泛研究,例如RFID技术[8]、接收信号强度[9]、GNSS[10]、UWB[11]等。考虑中小桥梁管养费用有限和重复利用等因素,基于GNSS的车辆定位系统相较于RFID和UWB的方法更适合点线、点面等中小桥群的快速测量。
本文基于北斗GNSS系统设计高空间分辨率的车辆定位系统,系统基于高精度MEMS组合导航,采用多传感器数据融合技术将卫星定位与惯性测量相结合,大大提高了系统的可靠性、精确性和动态性,满足城市峡谷等复杂环境下长时间、高精度、高可靠性导航应用需求。车辆定位系统的安装于车辆顶部前轴正上方,基于测量桥梁伸缩缝的绝对位置信息,通过车辆位置信息相对桥梁伸缩缝的位置信息即可完成车辆在桥梁上实时动态通行位置的测量。
3 数据动态同步采集
数据动态同步采集是保证影响线自动测量的前提,车辆定位信息与挠度及应变等监测数据同步是关键。桥梁结构响应频率较低,其数据同步采集精度要求较低,本文提出基于NTP的授时方法,车辆定位系统与监测系统均通过GNSS获取精确时间,从而保证数据通过相近时间戳可实现系统的数据动态同步采集以及数据的自动匹配。
健康监测系统根据系统功能划分设计多模式工作机制。系统录入伸缩缝位置标定后动态监测车辆位置信息,当车辆进入监测区域范围内,系统通过云平台自动切换健康监测系统工作模式。准静态工作模式适用于低频次采集状态的长期监测。动态采集模式适用于影响线测量,车辆进入预设区域后启动动态模式,车辆位置信息与监测数据均标注精准时间戳。
4 实桥测试
为进一步验证系统的可行性,选择实桥进行测试。选取内环快速路上6×20 m的预应力混凝土空心板桥进行测试。
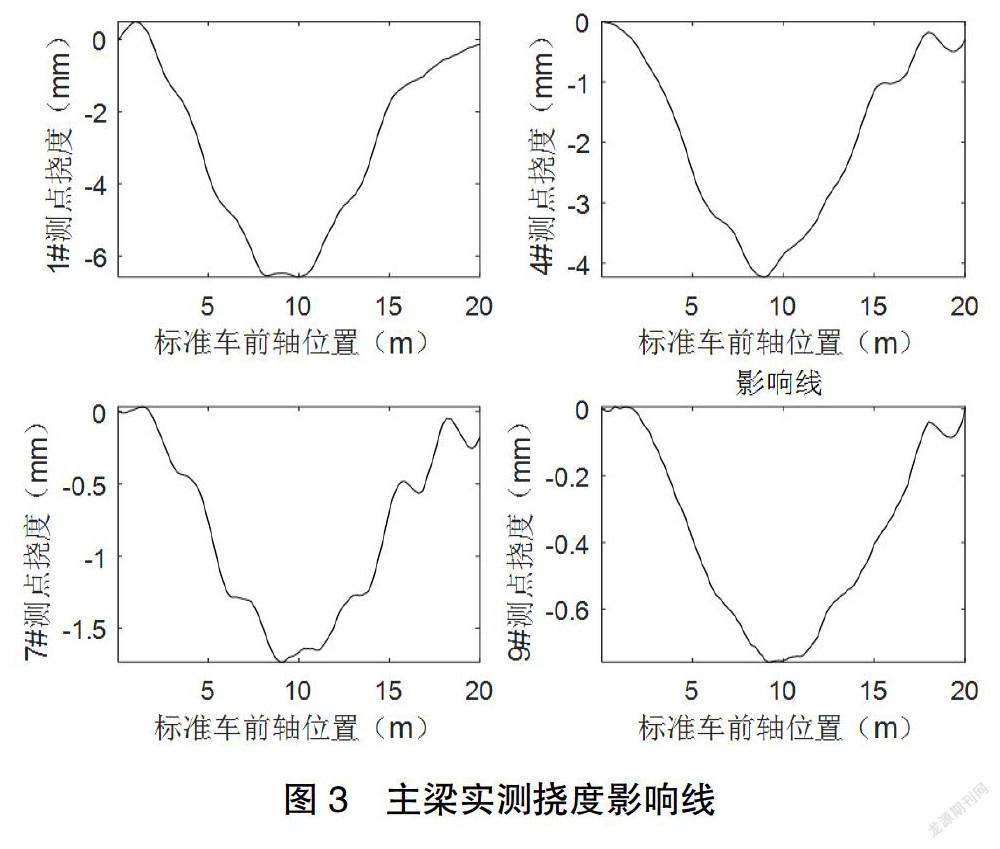
选择桥梁第4跨进行测试,在桥梁梁底跨中截面布设4个挠度测量点(对应测点编号1、4、7、10),利用毫米波雷达实现桥梁动挠度的测量。车辆定位信息输出速率及挠度采集频率均设置为100 Hz。车辆定位系统精度5 cm,基于雷达的挠度测量系统精度0.1 mm,北斗时钟服务器授时精度±2 ms。加载车为1辆3轴载重汽车,加载车总重34.3 t,其中前轴重8.1 t,中后轴共重26.2 t,前中轴距4.0 m,中后轴距1.4m。选取车道3跑车数据进行分析,4片梁影响线结果如下:
试验结果表明,本文所提出的高空间分辨率动态影响线自动测量技术可有效的解决动态影响线快速自动化测量问题,具有良好的工程应用价值。
5 结束语
本文提出了一种高空间分辨率动态影响线自动测量技术,基于高精度MEMS组合导航,采用多传感器数据融合技术将卫星定位与惯性测量相结合的车辆定位技术,有效解决中小桥复杂环境下的高空间分辨率动态车辆定位问题。基于GNSS绝对时间戳的数据同步采集与匹配方法,为数据自动匹配与分析提供保障。基于云平台技术,实现远程全自动化的测量。最终实桥验证结果表明,该方法可有效的应用于桥梁动态影响线自动测量,为桥梁状态评估提供有效支撑。
参考文献:
[1]Sohn H,Farrar C R,Hemez F M,et al.A Review of Structural Health Review of Structural Health Monitoring Literature 1996-2001[J].Data Acquisition,2002,la-13976.
[2]唐光武,廖敬波,赵岩,等.基于影响线的桥梁结构评定理论研究进展[J].公路交通技术,2008(06):39-43+47.
[3]廖敬波,唐光武,张又进,等.实测准静态广义影响线在桥梁结构静载试验中的应用研究[J].公路交通技术,2009(06):65-68.
[4]王宁波,任伟新,何立翔.基于桥梁动力响应的应变影响线提取[J].中南大学学报,2014,45(12):4362-4369.
[5]吴贵飞.基于实测位移影响线的桥梁结构损伤识别研究[D].北京工业大学,2017.
[6]余亭.基于影响线的桥梁快速安全评定方法研究[D].东南大学,2019.
[7]邹武雷,基于实测影响线的中小跨径梁桥承载力快速评定[J].福建交通科技,2020(04):88-93+64.
[8]Chon H D,Jun S,Jung H,et al.Using RFID for accurate positioning[J].Positioning,2005,3(1&2):32-39.
[9]Parker R,Valaee S,Vehicular node localization using received-signal-strength indicator[J].IEEE Transactions on Vehicular Technology,2007,56(06):3371-3380.
[10]张凡,基于北斗定位的车辆定位监控系统的设计[D].武汉理工大学,2014.
[11]徐爱功,曹楠,隋心,等.基于BDS/UWB的协同车辆定位方法[J].测绘科学,2020,45(06):1-8.
