适用于智能网联汽车的轮毂电机四轮驱动动力系统开发
2020-09-10罗映徐熊王淑超赵宗凯卢浩李靖赵磊
罗映 徐熊 王淑超 赵宗凯 卢浩 李靖 赵磊





摘要:轮毂电机和四轮驱动具有独特的性能优势,本文对动力系统进行详细计算,设计了一款适用于智能网联汽车的电动四轮独立驱动线控动力系统。
关键词:智能网联汽车;轮毂电机;动力系统
0 引言
电动化和智能化是当代汽车发展的必然趋势,采用轮毂电机的电动汽车底盘具有如下优点[1]:
①将汽车的动力、传动、制动等系统集中在车轮内部,简化了车辆的机械结构,从而降低了生产和维护成本、降低故障率。②整车质量降低,从而降低整车能量消耗,且更容易实现制动能量回收,增加续驶里程。③提高了整车的灵活性,采用四轮独立驱动,可实现较小的转弯半径,甚至能够实现原地转向。④提高了整车可靠性,智能网联汽车最终将实现无人驾驶,而采用四輪独立驱动线控底盘,即使有两个驱动轮失去动力,也能“跛行回家”,因此更适用于智能网联汽车。
本文将北汽EV150电动汽车的四轮全部改装成轮毂电机,采用自研的整车控制器VCU通过CAN总线与四个车轮的电机驱动器进行通讯,对整车控制算法进行了建模,最终实现四轮独立驱动,可用于智能网联汽车的研发和功能测试,为实现无人驾驶打下了基础。
1 整车动力性计算
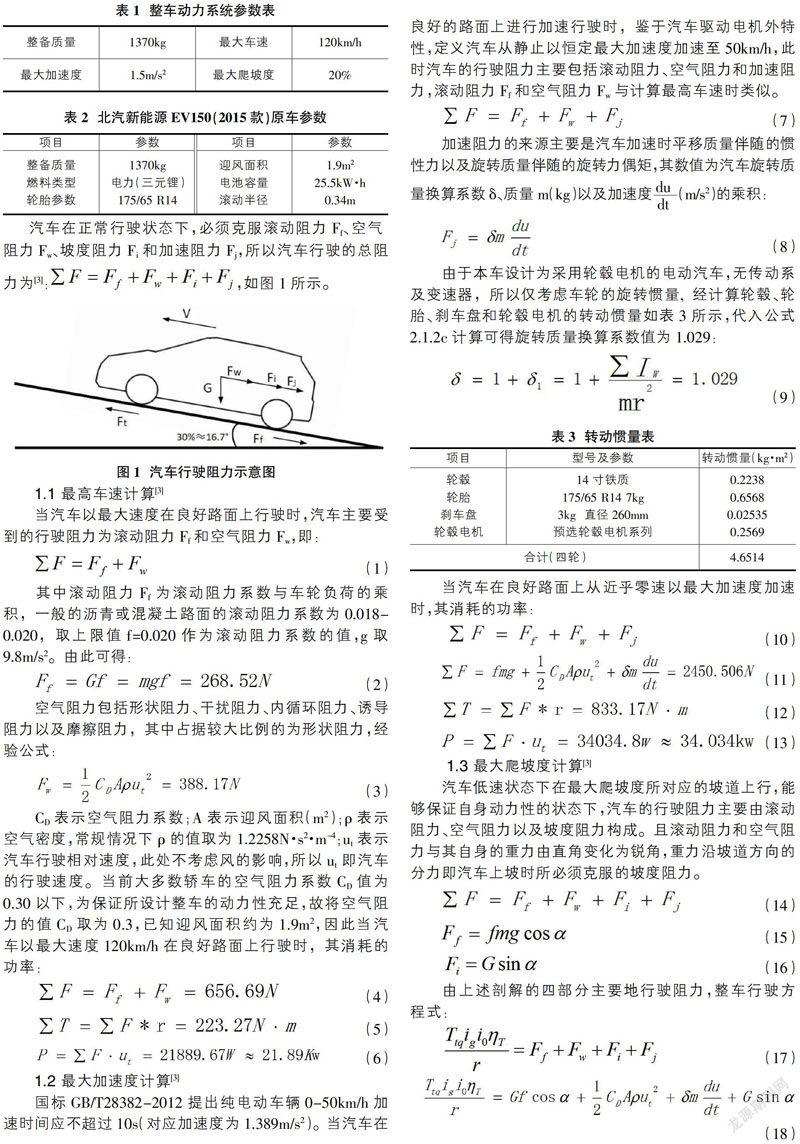
汽车的动力性能评价指标包括最大车速、最大加速度和最大爬坡度,根据GB/T28382-2012标准要求,取动力性能指标如表1所示。
本文是在北汽新能源EV150电动汽车上进行改装,其主要参数如表2所示[2]。
汽车在正常行驶状态下,必须克服滚动阻力Ff、空气阻力Fw、坡度阻力Fi和加速阻力Fj,所以汽车行驶的总阻力为[3]:■,如图1所示。
1.1 最高车速计算[3]
当汽车以最大速度在良好路面上行驶时,汽车主要受到的行驶阻力为滚动阻力Ff和空气阻力Fw,即:
其中滚动阻力Ff为滚动阻力系数与车轮负荷的乘积,一般的沥青或混凝土路面的滚动阻力系数为0.018-0.020,取上限值f=0.020作为滚动阻力系数的值,g取9.8m/s2。由此可得:
空气阻力包括形状阻力、干扰阻力、内循环阻力、诱导阻力以及摩擦阻力,其中占据较大比例的为形状阻力,经验公式:
CD表示空气阻力系数;A表示迎风面积(m2);?籽表示空气密度,常规情况下?籽的值取为1.2258N·s2·m-4;ut表示汽车行驶相对速度,此处不考虑风的影响,所以ut即汽车的行驶速度。当前大多数轿车的空气阻力系数CD值为0.30以下,为保证所设计整车的动力性充足,故将空气阻力的值CD取为0.3,已知迎风面积约为1.9m2,因此当汽车以最大速度120km/h在良好路面上行驶时,其消耗的功率:
1.2 最大加速度计算[3]
国标GB/T28382-2012提出纯电动车辆0-50km/h加速时间应不超过10s(对应加速度为1.389m/s2)。当汽车在良好的路面上进行加速行驶时,鉴于汽车驱动电机外特性,定义汽车从静止以恒定最大加速度加速至50km/h,此时汽车的行驶阻力主要包括滚动阻力、空气阻力和加速阻力,滚动阻力Ff和空气阻力Fw与计算最高车速时类似。
由于本车设计为采用轮毂电机的电动汽车,无传动系及变速器,所以仅考虑车轮的旋转惯量,经计算轮毂、轮胎、刹车盘和轮毂电机的转动惯量如表3所示,代入公式2.1.2c计算可得旋转质量换算系数值为1.029:
1.3 最大爬坡度计算[3]
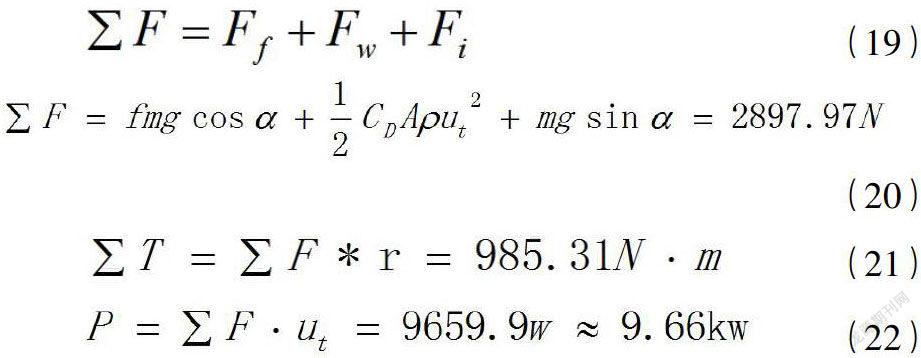
汽车低速状态下在最大爬坡度所对应的坡道上行,能够保证自身动力性的状态下,汽车的行驶阻力主要由滚动阻力、空气阻力以及坡度阻力构成。且滚动阻力和空气阻力与其自身的重力由直角变化为锐角,重力沿坡道方向的分力即汽车上坡时所必须克服的坡度阻力。
当汽车在最大爬坡度(20%)所对应的坡道(约为11.3°)上行,以12km/h的速度匀速行驶时(此时也可以忽略空气阻力,因为是最低车速,这时的功率应该根据TNP的关系来算),其消耗的功率及对应扭矩:
根据上述分析和计算,所选电机的总功率不小于34kW,总力矩不小于986N·m,由于是四轮驱动电机,因此单个电机的功率不小于6.8kW,力矩不小于246.5N·m。
2 电机选型
目前,可以应用于轮毂电机四轮驱动电动汽车的电机地类型主要为:无刷直流电机、开关磁阻电机、感应电机和永磁同步电机,由于永磁同步电机体积小、质量轻、可靠性高,并且在运行的过程中噪音和振动比其他电机都表现出了良好的性能,所以选用永磁同步电机并选配了相应的电机驱动器,如图2所示为电机和驱动器实物。
鉴于市面成品轮毂电机可选量较少因素,最终选择的电机参数如表4所示。
根据上面的计算,将所选电机额定扭矩代入公式,将峰值扭矩代入公式,可以反推计算出车辆的最高车速、最大加速度和最大爬坡度如表5。
3 线控动力系统控制实现
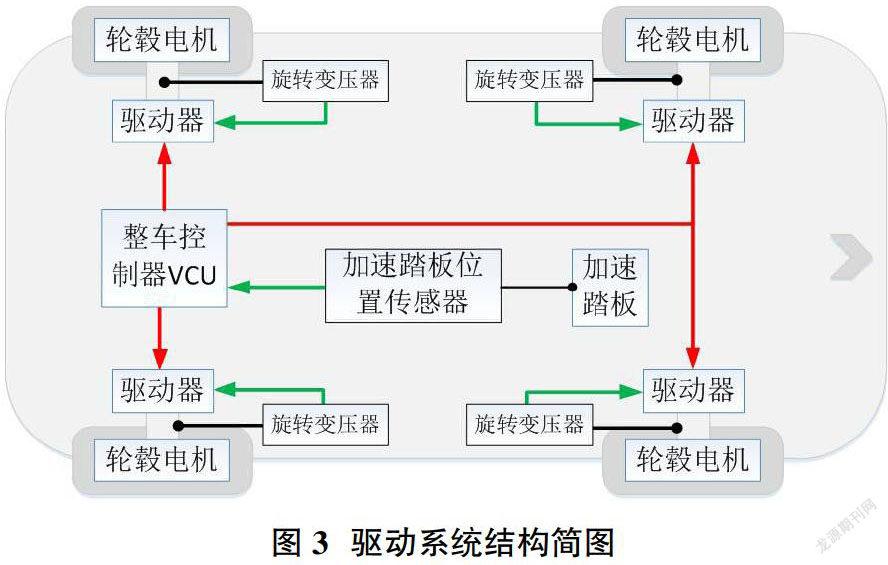
如图3所示,该线控动力驱动系统由4个独立的轮毂电机、每一个轮毂电机配有各自的电机驱动器,工作时互相独立不干涉,4个电机均装有旋转变压器,以实时反馈电机旋转的角度和转速。驱动模式有两种:转速PID闭环控制模式和转矩PID闭环控制模式。该线控动力驱动系统还包括整车控制器VCU、加速踏板传感器,整车控制器采集加速踏板传感器信号,解算成速度或转矩信号后通过CAN-BUS总线发送至电机驱动器,来实现四个轮的独立驱动。
需要注意的是:安装前必须针对电机参数对驱动器进行各项参数标定,才能实现在不同行驶工况下对电机的转速和转矩进行精确控制,根据控制要求,制定通讯协议如表6所示。
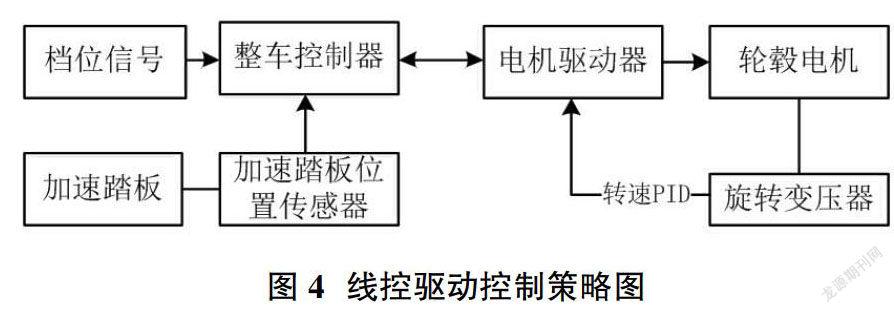
动力驱动系统由整车控制器VCU作为核心控制器,通过CAN总线与各轮毂电机驱动器实现信号收发,驱动器根据接收到的VCU的控制信号对电机的转矩和转速进行控制(如图4所示)。在整个过程中,旋转变压器、轮速传感器和扭矩传感器持续工作,实时监测车轮转速和车轮转矩,并通过CAN总线反馈给整车控制器。VCU根据接收到的反馈信号,对发出的控制信号进行实时调整,精准控制电机转速和转矩,其控制模式又细分为转矩闭环PID控制以及转速闭环PID控制。
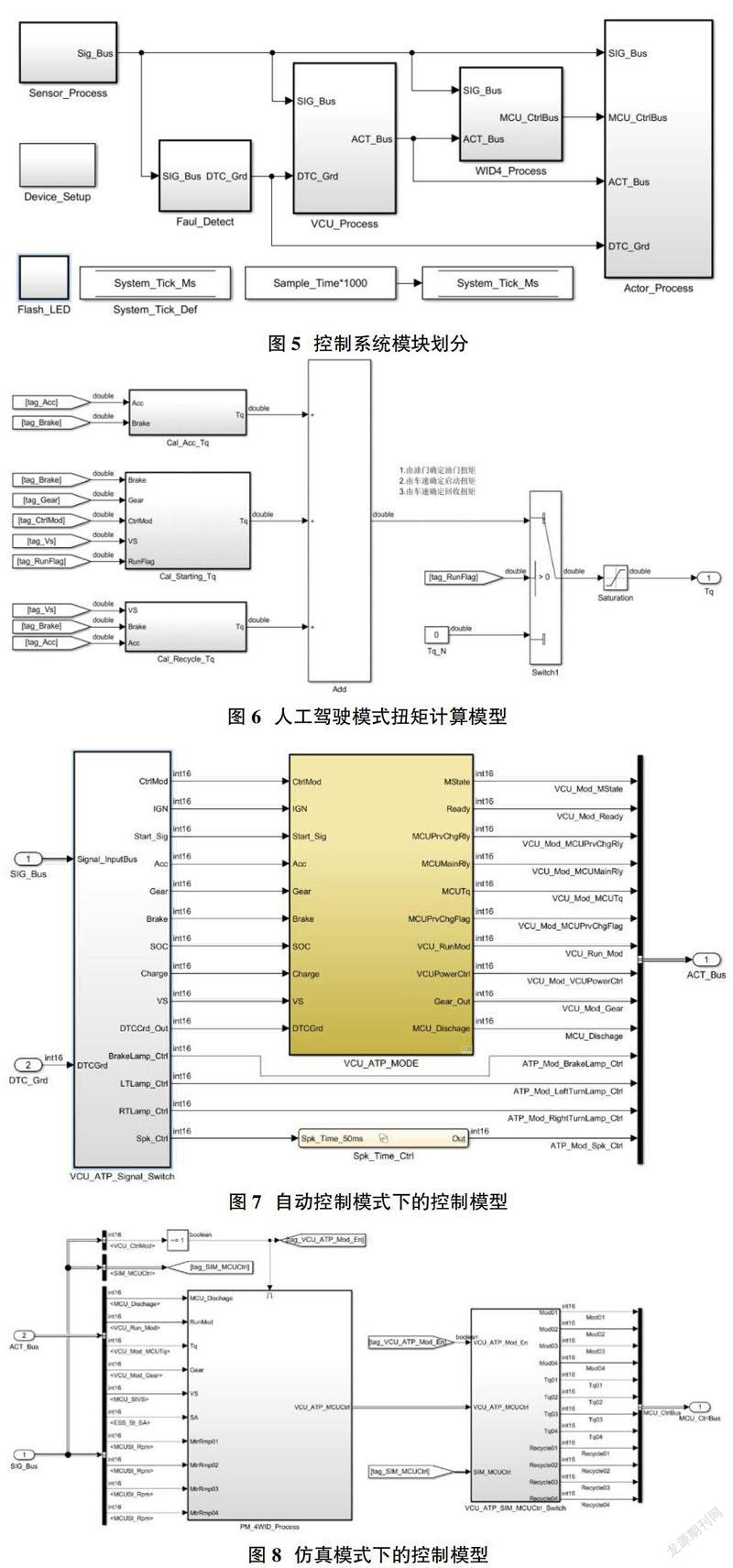
4 控制系统建模
本模型采用simulink软件对驱动控制系统进行建模,硬件采用PM-ECMV2可配置控制器,功能包括:人工驾驶控制模式、自动驾驶线控模式、仿真调试模式。
如图5所示,模型由数据采集模块、故障诊断模块、VCU处理模块、四轮驱动处理模块、执行器控制模块等组成。
4.1 人工驾驶控制模式
控制使用的信号有加速信号、制动信号、档位信号、车速信号、停止信号,然后计算得到输出整车控制扭矩,发送给四轮驱动模块然后分配给4个驱动轮。
整车扭矩包括行车扭矩、起步扭矩、能量回收扭矩三部分。其中行车扭矩计算模块(Cal_Acc_Tq)利用加速信号做开环扭矩输出,启动扭矩计算(Cal_Starting_Tq)通过车速闭环计算扭矩输出、制动能量回收计算(Cal_Recycle_Tq)通过车速查表获得回收扭矩值,如图6所示。
4.2 自动驾驶线控模式
当检测到由人工驾驶切入到自动驾驶状态时,控制系统进入自动驾驶模式,自动驾驶模式下的加速信号、档位信号、转向灯、制动灯、喇叭等信号由自动驾驶决策控制器(本文不涉及)通过CAN总线下发,然后通过多路选择器后进入整车控制逻辑,如图7所示。
4.3 仿真模式
当检测到由人工驾驶模式进入到仿真调试模式时,系统自动进入到仿真调试模式,该模式下,所有输入和输出信号参数均可通过仿真模型进行在线修改,在仿真环境中验证控制算法,控制模型如图8所示。
5 总结
本文对轮毂电机四轮驱动电动汽车的线控驱动系统的动力系统进行了计算,并对控制系统进行了详细设计,最后经实车实验(如图9所示),完成了对动力系统设计的功能和性能验证。实验证明,最高车速121km/h,最高爬坡度20%,最大加速1.83m/s2,满足设计要求。
参考文献:
[1]陈国迎.四轮独立线控电动汽车试验平台搭建与集成控制策略研究[D].长春:吉林大学,2012.
[2]张玉良.体验北汽纯电动汽车E150EV[D].青海:青海科技,2012.
[3]余志生,汽车理论[M].五版.北京:机械工业出版社,2015.