电动叉车多路阀操纵机构优化设计及人机工程仿真
2020-09-10位猛
位猛
摘要:本文研究的是单杆操纵三阀,单杆操纵使得驾驶室空间充裕,操作方便。在验证多路阀操纵机构设计合理性时首先依据叉车驾驶员操纵相关机构的动作特征,然后对优化设计的多路阀机构进行人机工程仿真分析,不断改善叉车驾驶人员操作舒适性并根据仿真结果分析对多路阀操纵机构进一步优化的一种研究。
关键词:电动叉车;操纵机构优化设计;舒适性;人机工程仿真
0 引言
叉车多路阀是由两个或两个以上片式换向阀为主体组成的组合体,同时结合叉车的使用特点[1,2,4],而开发的一种专用液压阀。因为叉车驾驶室空间局限性,一个多路换向阀要实现所有该叉车所需的功能。所以叉车使用的多路阀设计成两个或两个以上片式换向阀为主体的组合结构,以实现叉车功能的多样性。
1 单杆操纵多路阀机构设计
本章节设计一种单杆操纵机构,该方案采用一个拨片在不同的位置拨动不同的多路阀阀芯,从而控制多路阀的换向,在滑动杆的两端利用凸台进行定位,同时在两端加装复位弹簧,从而使拨片可以正常状态下处于中间阀片上,实现自动复位的功能。
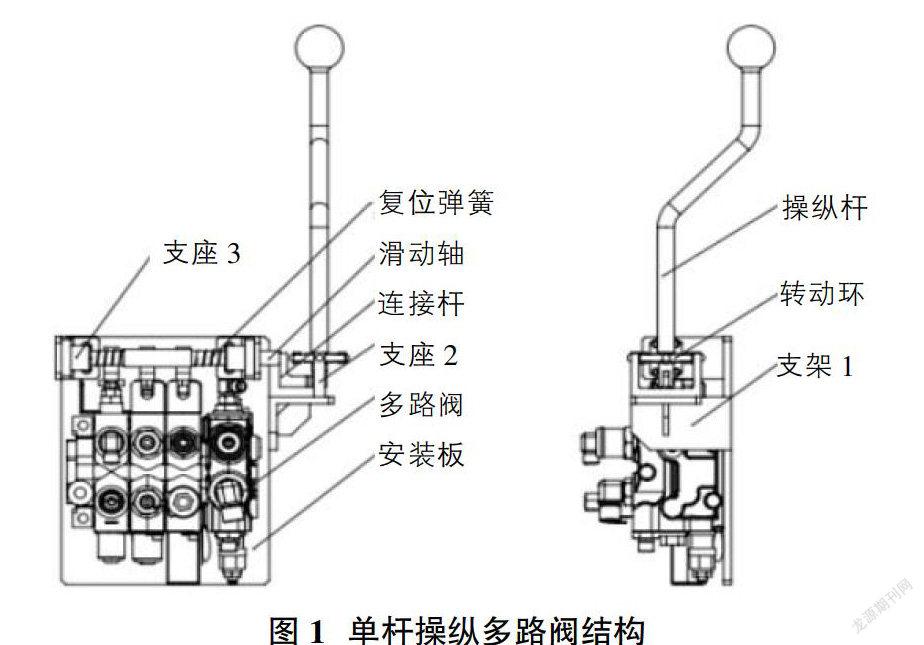
①该种单个操纵手柄操纵多个多路阀阀芯的机构主要组成有操纵杆、转动环、支架1、复位弹簧、滑动轴、连接杆、支座2、多路阀、安装板、支座3、阀芯卡槽与拨块,具体视图如图1。
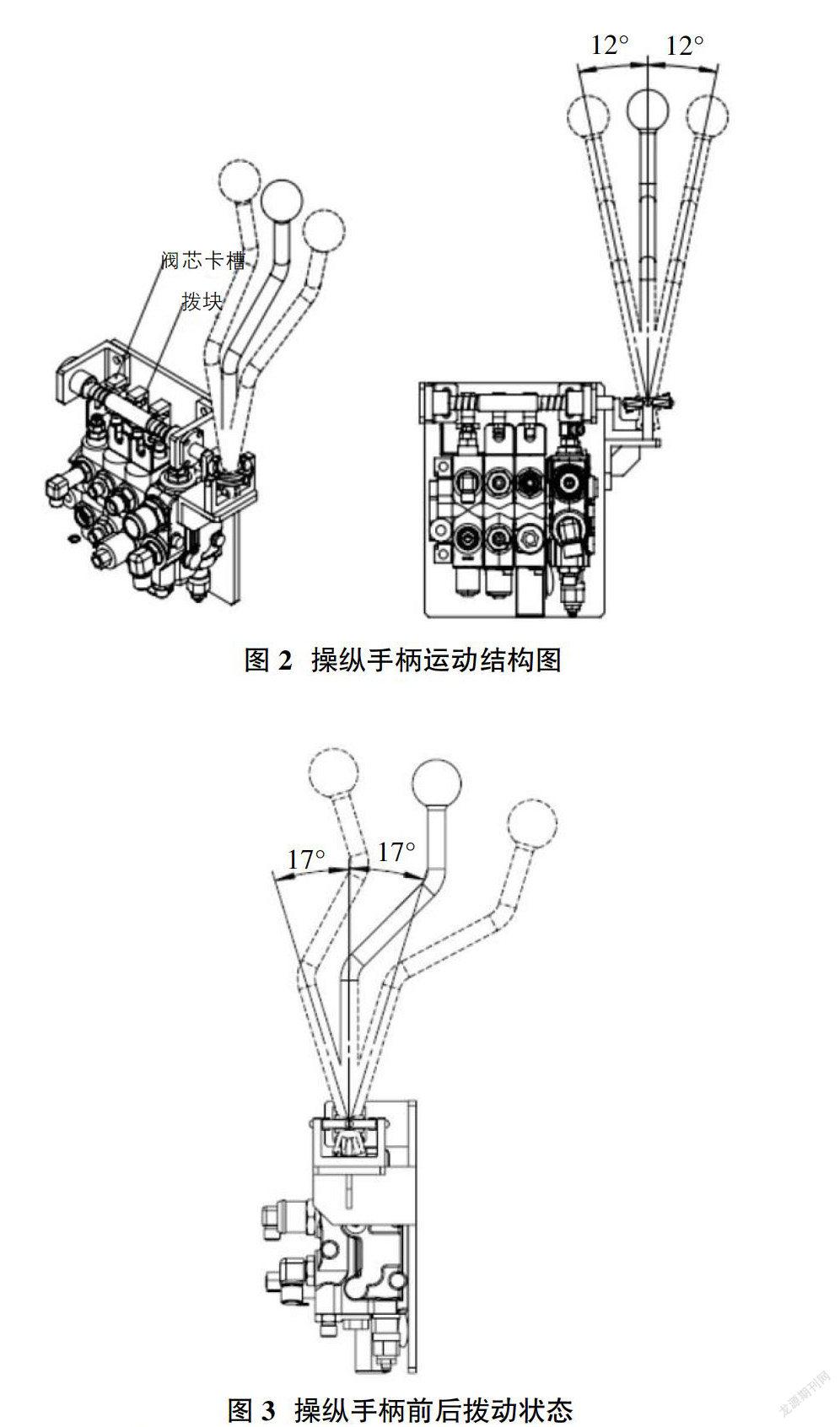
②该单杆多路阀操纵手柄通过旋转环来实现操作角度,由多路阀的构造规定多路阀的阀芯间隔为38mm,由结构的工作原理在软件Solidworks中作出拨块移动距离而得出操纵手柄的摆动角度为12°,如图2。
③多路阀阀芯由于结构原理,阀芯向上或者向下移动的距离为7.2mm,所以通过软件Solidworks可以得出由于阀芯垂直运动距离为7.2mm而得出拨块的偏转角度与操纵手柄的偏转角度为17°,如图3。
2 单杆操纵多路阀操纵机构仿真
在进行驾驶员操作多路阀单杆操纵机构人机工程仿真时,其中驾驶员坐姿舒适性仿真利用Delmia软件[5]中人体姿态分析(HPA)中姿态评估与优化功能,驾驶员操纵姿态舒适性分析运用了Delmia软件中RULA功能[3]。
①分析驾驶员操纵单杆操纵手柄前倾时姿态。
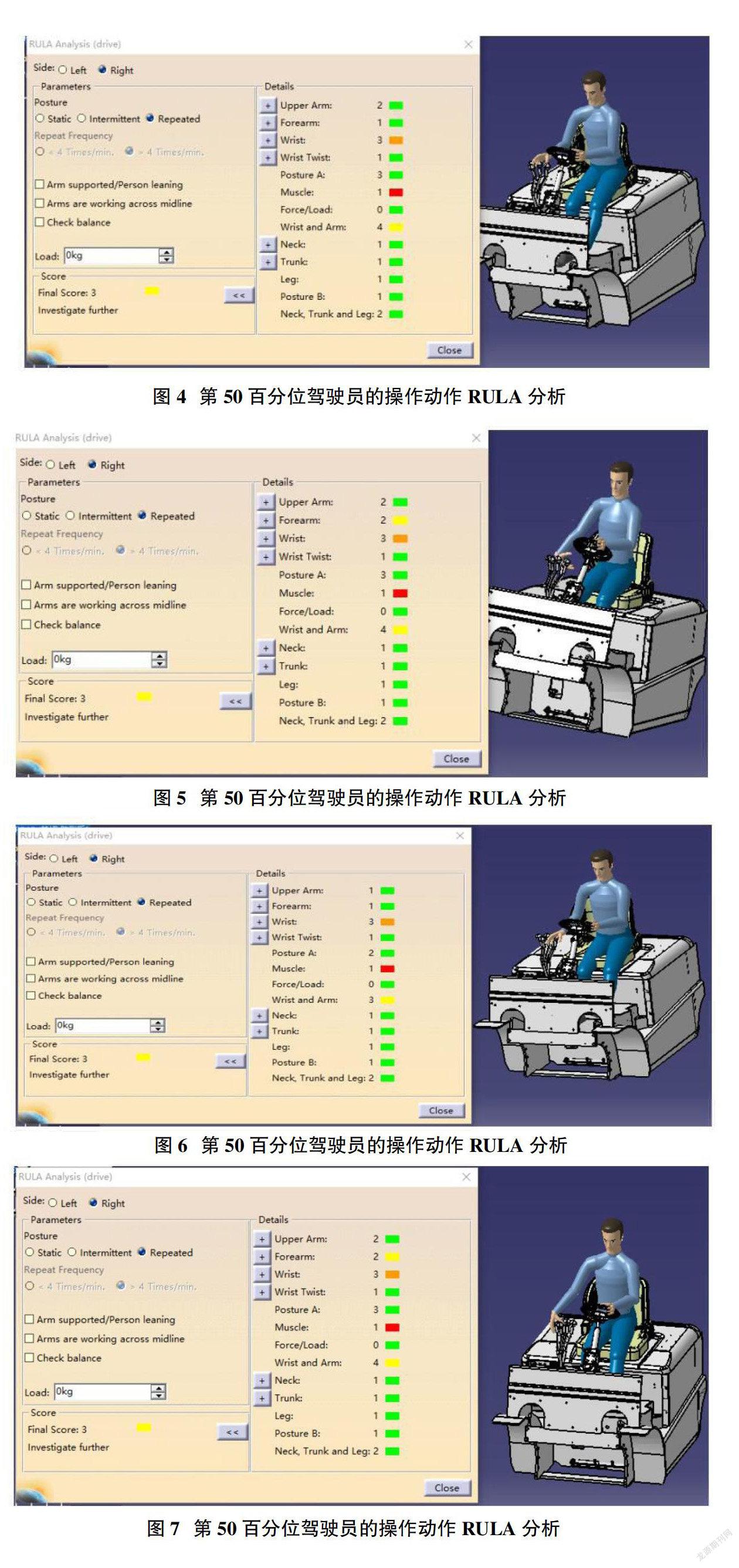
如图4结果表明驾驶员在操纵手柄时上臂(Upper Arm)得分为2分与前臂(Forearm)得分为1分,主要部位都处于舒适状态下,则说明驾驶员操纵该设计优化的多路阀操纵机构前倾时是舒适的。
②分析驾驶员操纵单杆操纵手柄后倾时姿态。
如图5结果表明驾驶员在操纵手柄时上臂(Upper Arm)得分为2分与前臂(Forearm)得分为2分,主要部位都处于舒适状态下,则说明驾驶员操纵本文设计优化的多路阀操纵机构前倾时是舒适的。
③分析驾驶员操纵单杆操纵手柄向靠近身体一侧运动时姿态。
如图6结果表明驾驶员在操纵手柄时上臂(Upper Arm)得分为1分与前臂(Forearm)得分为1分,然而其他主要部位都处于舒适状态下,则说明驾驶员操纵本文设计优化的多路阀操纵机构前倾时是舒适的。
④分析驾驶员操纵单杆操纵手柄向远离身体一侧时姿态。
如图7結果表明驾驶员在操纵手柄时上臂(Upper Arm)得分为2分与前臂(Forearm)得分为2分,然而其他主要部位都处于舒适状态下,则说明驾驶员操纵本文设计优化的多路阀操纵机构前倾时是舒适的。
3 结论
综上所述,叉车驾驶员在操纵单杆手柄时,上肢舒适度较高,驾驶员驾驶姿态舒适性也比较舒适,操作动作RULA姿态舒适分析也在合理范围内,因此该多路阀操纵机构优化设计是符合人机工程学要求。
参考文献:
[1]Clustering-based Sales Forecasting in a Forklift Distributor[J].International Journal of Engineering Research and Development,2019,11(1).
[2]于彦凤,王帅.基于人因工程学的工程车辆驾驶室舒适性研究[J].大众标准化,2019(13):33,35.
[3]彭卫平,胡向阳,雷金,陈磊.基于RULA的数控机床控制面板操作舒适性分析[J].人类工效学,2017,23(06):42-46,56.
[4]王瑞,章文誉,姚甲,马庆丰,吴信丽,葛立银,杨鸥.具有单连杆操纵机构的叉车多路阀[P].CN206051466U,2017-03-29.
[5]陈世钟,宋健,黄卓,窦正伟,管贻生.DELMIA在机器人生产线仿真中的应用[J].机械制造与自动化,2016,45(04):157-160.
