探究工程机械臂的系统结构动力学及其特性
2020-09-10孙强
孙强


摘要:如今随着科技的不断创新与发展,使得各类机械产品的性能、精确度以及使用寿命等方面都有了十分显著的提升,这些内容也正是加强机械产品设计的主要部分。而工程机械臂是各种工程机械设施最为主要的部件之一,是充分展现工程机械动力学性能的基础,能够有效的提高工程机械的质量、运行效率以及安全,对工程机械的准确程度方面有着重要的影响,所以本文就对其进行了研究。
关键词:机械产品;机械设施;运行效率
1 总体的研究现状
1.1 多体系统动力学的整体研究现状
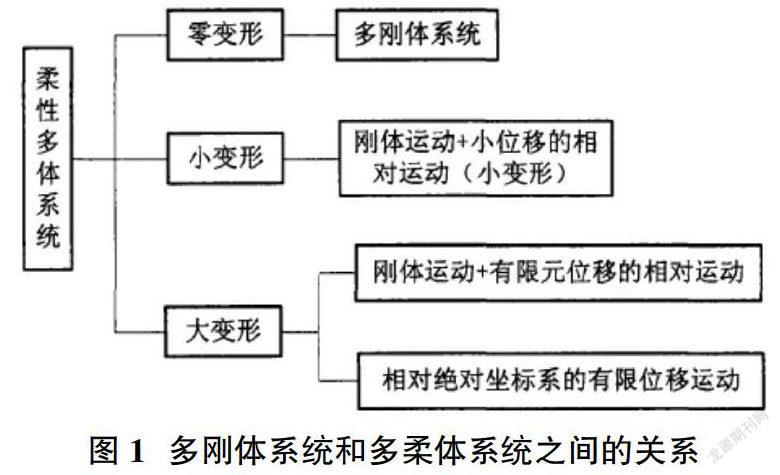
一般来说,工程机械臂是一套多体系统,且具有典型的特征,多体系统的结构界定较繁琐,是由物体、铰、外力等部件所构成的,同时存在拓扑结构的系统。通常多体系統的动力学是研究规律的科学,主要研究的是多体系统运动规律,其中还可以划分更多的层次,主要包括:多刚体系统动力学以及多柔体系统动力学,其中这两者的关系我们可以用图1来体现。而研究的内容为刚体、柔体系统动力学模型的理论、计算、微分方程、机构综合探究、柔性效应、优化措施以及结果可靠程度等等。现阶段的多体系统动力学已经有了较为全面的分析方法,其中最为普遍的方法有:拉格朗日方程分析法、牛顿欧拉方程矢量学法、图论法以及变分法等。
1.2 工程机械臂的研究内容及其现状
工程机械臂的部位是整个工程机械设施最为主要的部分之一,对它的设计方面会影响到整个工程机械的运行情况、性能以及生产效率等。如今对工程机械臂的研究内容主要包括以下几方面:
①工程机械臂的系统动力学微分方程研究。因为多体动力学常见的建模方法为罗伯森维滕伯格法、牛顿欧拉法、拉格朗日法以及休斯敦法等等,所以对于机械臂多体动力学的微分方程正是建立在这些方法之上的。
②机械臂的动力学仿真研究。此方法主要是通过力学的分析软件对机械臂的系统展开了仿真处理,得出受力情况的仿真曲线,给工程机械装置动力学的性能研究带来根据。
③工程机械臂的模型研究和动态优化。机械的结构性可以用相关模型指标来表示,主要是通过结构的振动模型指标来表示,其中模型的参数包括许多项目,主要包括:振动频率、阻尼和振型,通过这些指标就能够判断出机械结构特性的好坏。经过对指标的具体分析,我们可知机械臂的系统结构具有固定的频率和振型。经过对工程机械臂的模型研究和动态优化,可以有效的提升工程机械臂的系统运行效率和质量。从工程机械臂的角度上看,探究其结构并优化对设计方面来讲会更有效果。对动态结构的优化主要目的就是为了确保机械臂的框架更加优化,增强机械装置的运行效率以及稳定性。
④工程机械臂的系统轨迹策划和优化。轨迹策划就是指找出机械臂的端点和每个臂杆转角之间的关系,通过优化与控制相结合的办法,找出臂杆的运动轨迹。因为柔性臂的结构框架比较有弹性,在运动时其末端会发生抖动,因此应该采取有效的控制方法来得出准确的运动轨迹。
2 工程机械臂动力学性能智能控制
工程机械臂的系统比较复杂,它的属性是非线性的,属于多变量系统,其具有高阶次、不稳定、多变量、非线性以及强耦合等特性,所以如果将其作为控制对象,就必须采取科学、合理的控制方法,才能有效的对其性能进行研究。重点应对工程机械臂的动态性能进行研究,例如运行的速度、振型、频率以及运动轨迹等。现阶段工程机械臂的运动轨迹控制越来越受到人们的关注,并逐渐成为了热门内容,正因为工程机械臂的不断应用,因此大量的学者和专家纷纷对工程机械臂进行探究,他们一般采用不同的控制理论来探索,与此同时也提出了相应的控制方法,当前控制方法有许多,主要包括:鲁棒控制、自适应控制等等等,这些方法在特定的情境下都有一定的成效。这里面需要提到的是PID控制器,PID控制具有许多优势,它的结构非常简单,是日常应用最广泛的一种控制方法,它的应用也非常广泛,许多大型企业都在应用,其原理图为图2。
3 工程机械臂的系统结构优化及过程
对工程机械臂的系统结构优化研究是现阶段的重点内容之一,对工程机械臂的合理化设计能够有效的提高机械装置的强度,减少损坏和伤害,不过静态的优化措施已无法满足现代化的要求,所以必须采取动态的优化方法来增强机械设备的强度和设计。动态的优化方法是在静态的优化方法之上形成的,经过对机械部件中相关参数以及分布情况进行调整,以提高部件的动态性能。如今是科技化的时代,越来越多的机械设备被大量的使用,因此对其性能、结构以及设计等方面的优化更加受到了人们的重视。
3.1 机械臂动力学系统动态优化的实现过程
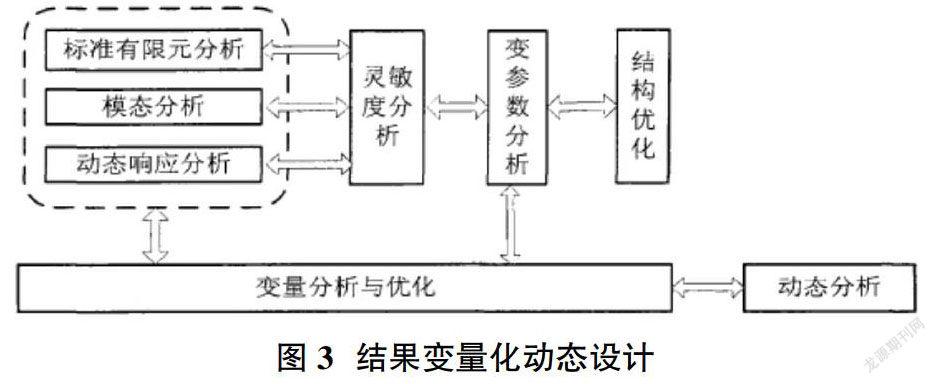
对机械臂动力学系统结构的研究中最常用的方法就是有限元法。通常机械臂的结构是由板、杆等部件组成的,通过有限元法能够准确的构造出实际的机械装置,有很高的精确性。有限元法的优化机理主要以变量分析为主,通过变量分析来了解机械的结构,其主要是建立于高灵敏性分析以及级数展开式的基础之上,类似于重分析法。变量分析的主要流程是:当设计参数在规定的范围当中出现变化时,探究机械装置的固有频率以及动刚度等动态性能的变化,先制定出目标函数、设计变量以及状态函数,然后求解,最后改善机械装置的薄弱之处,增强机器的动态性能。图3就是结构变量化动态设计的流程。
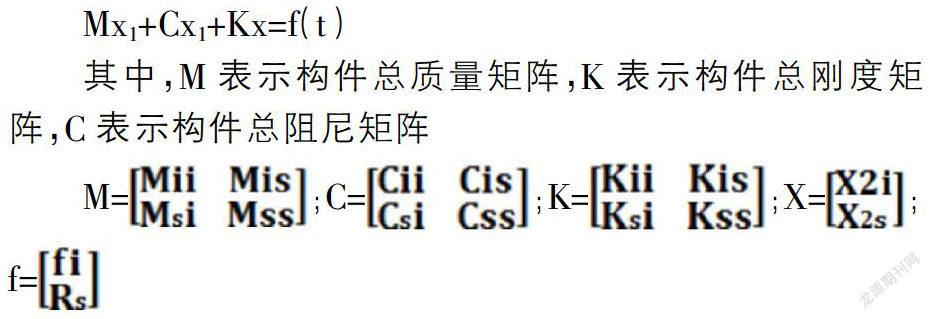
对机械系统建设有限元模型,通过动力缩减工艺得出结构动力学的有限元方程为:
其中,M表示构件总质量矩阵,K表示构件总刚度矩阵,C表示构件总阻尼矩阵
X1i为强迫运动速度,X2i为强迫运动加速度,fi为主动力,Rs为反作用力,i为约束自由度,s为未约束自由度。
通过上述公式我们能够得出结构振动系统的固有频率、振型等,主要是通过位移、速度、加速度、应力、应变等指标得到。研究结构系统的固有频率和振型是动态优化设计的基本,通过此机械模型能够有效的发现影响结构动态性能的模态频率,并可将其作为动态优化的主要目标函数。
3.2 工作装置有限元建模
我们在UR里模拟出了某机械装置的三维模型,同时将一些影响非常小的因素除掉,如螺纹孔、圆角以及倒角等微小的影响因素,然后在NASTRAN当中设置出各项变量的属性,其中材料的弹性模量设置为2*1011MPa、泊松比为0.3、密度为7800kg/m3、重力加速度为9.8m/s2。其次将工作装置划分成网格,主要的划分方法为自由网格划分法和四节点四面体实体單元划分法,可将工作装置划分成119584个单元和57126个节点。工作装置借助销轴把每个部件相连接,销轴铰接的具体处理形式为:除去销轴,在销轴的中心销处设置外部的节点,将其与销轴孔的内表面之间通过单元形成刚性的区域,制约径向自由度,留置切向自由度。
算出机械臂装置的固有频率和振型是研究机械系统动态特性的主要部分。因此可以采用模态分析来算出机械臂装置的固有频率以及振型,其中模态分析的内容包括两部分,分别为:自由模态和约束模态,在进行模态分析时只需对几种较为典型的工况实施探究即可。在研究时应将工作装置、回转平台以及动臂油缸作为一个整体,保持不变。具体的结果详见表1。
通过模态分析的结果我们能够发现,对此工作装置频率的影响主要是在前几阶上,而且前阶的固有频率都在之中,所以分析工作装置模态时,应对前阶频率展开探究。
3.3 通过有限元软件分析工作装置结构动态优化
NASTRAN有极强的优化设计性能,能够对静力、模态、频率以及振型实施优化。在优化的过程当中,其允许有限元软件实施多个响应来优化目标函数,具体的指标有速度、位移、加速度、应力、频率、体积和它们的组合等等,设置的变量约束可为1D、2D、3D以及模型约束等。
以第2阶固有频率f2最大作为动态优化目标,即
min F(X)=1/f2
其为最大化臂架的弯曲刚度。
依照此优化模型,通过有限元软件NASTRAN的优化部分,设计目标函数、相关变量以及约束条件等得出结果,详见表2。
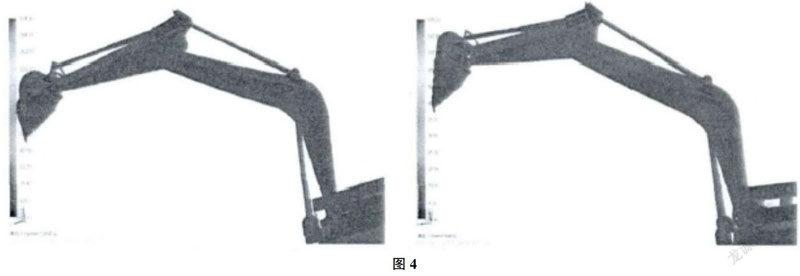
经过图表当中的数据以及结果对比我们能够发现:①对工作装置动态性能影响最大的为第2阶,频率升高了24.42%,弯曲刚度显著减少。②优化以后使得机械臂的重量减少了240.602kg,钢材与原来比节省了12.9%,显著减轻了机械臂的重量,使得改善后机械臂变得更为灵活。③机械臂的动应力比原来降低了166.37MPa,同时静、动应力差从83.059MPa变为了10.054MPa。由此可见,动态优化能够有效的增强机械臂的动态性能以及抗疲劳性能。④优化之后机械臂的水平静位移比之前的降低了32.7%,最大动位移减少为15.68mm,使得静、动态性能都显著的增大了。(图4)
4 总结
总之,工程机械臂的系统结构对工程机械装置的动力学性能有着严重的影响,不仅能提高工程机械的整体性能,而且还能有效的增强工程机械的运行安全、施工进度以及工作效率,所以对其进行探究是很有必要的。
参考文献:
[1]陆佑方.柔性多体系统动力学[M].北京:高等教育出版社,1996.
[2]宋建龙.柔性机械臂动力学建模与仿真研究[D].天津:天漳大学,2001.
[3]吕广明.工程机电技术[M].哈尔滨:哈尔滨工业大学出版社,2004.
[4]李杰.板结构动应力优化设计研究[D].郑州:郑州机械研究所,2004.
