5自由度机械手实验平台的运动学分析
2020-09-10肖国红
肖国红

摘要:针对开发出的一种基于PLC控制的5自由度机械手实验平台,进行了运动学分析。通过运动学分析,可以得到各关节运动参数与机械手末端的手爪位姿之间的数学模型,从而实现对工件的准确抓取。对机械手的运动学分析,不仅可以在实验中演示各种状态下的抓取动作,而且使学生掌握机械手运动学的分析方法。
Abstract: The kinematics analysis of a 5-DOF manipulator experimental platform based on PLC control is carried out. Through the kinematics analysis, the mathematical model between the motion parameters of each joint and the position & posture of the end of the manipulator can be obtained, so as to grasp the workpiece accurately. Upon the kinematics analysis of manipulator, it can not only demonstrate the grasping action in various states in the experiment, but also make students master the analysis method of manipulator kinematics.
关键词:5自由度机械手;实验平台;运动学分析
Key words: 5-DOF manipulator;experimental platform;kinematics analysis
中图分类号:TP241 文献标识码:A 文章编号:1674-957X(2020)22-0223-02
0 引言
由于多自由度机械手在物料搬运过程中能取代人工操作,并且具有重复精度高、能显著提高自动化水平和生产效率的特点,得到了广泛的应用[1]。实际生产中,在设计好机械手后必须建立运动学模型[2]。通过正逆向运动学模型,可以计算出各关节在一定运动参数下机械手末端的位姿,也可以根据机械手末端位姿确定关节的运动参数,从而实现可控地准确抓取物料[3]。
本项目开发的基于PLC控制的5自由度机械手实验平台,目的是在完成机电产品开发与设计、机器人学、电气控制与PLC等课程的实验教学基础上,通过该平台使学生掌握机械手运动分析的方法,为以后从事相关的设计工作打下基础。
1 机械手系统的结构
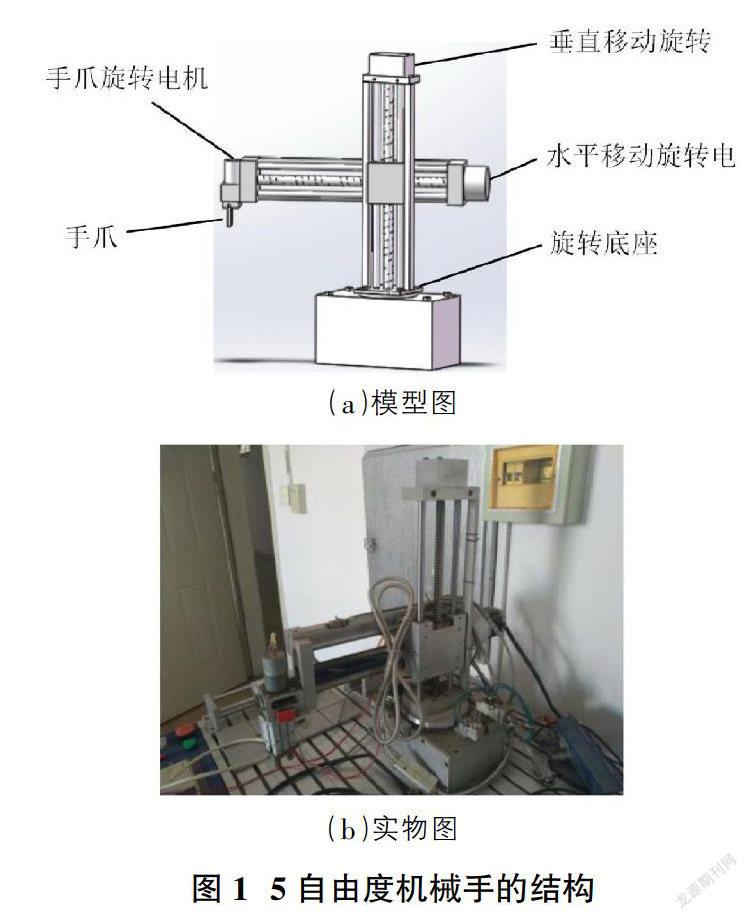
本项目开发的5自由度机械手,可以实现底座旋转、竖直移动、水平移动、手爪旋转、手爪移动抓取等动作,达到在指定位置取放工件的目的。图1分别是机械手样机的模型图和实物图。
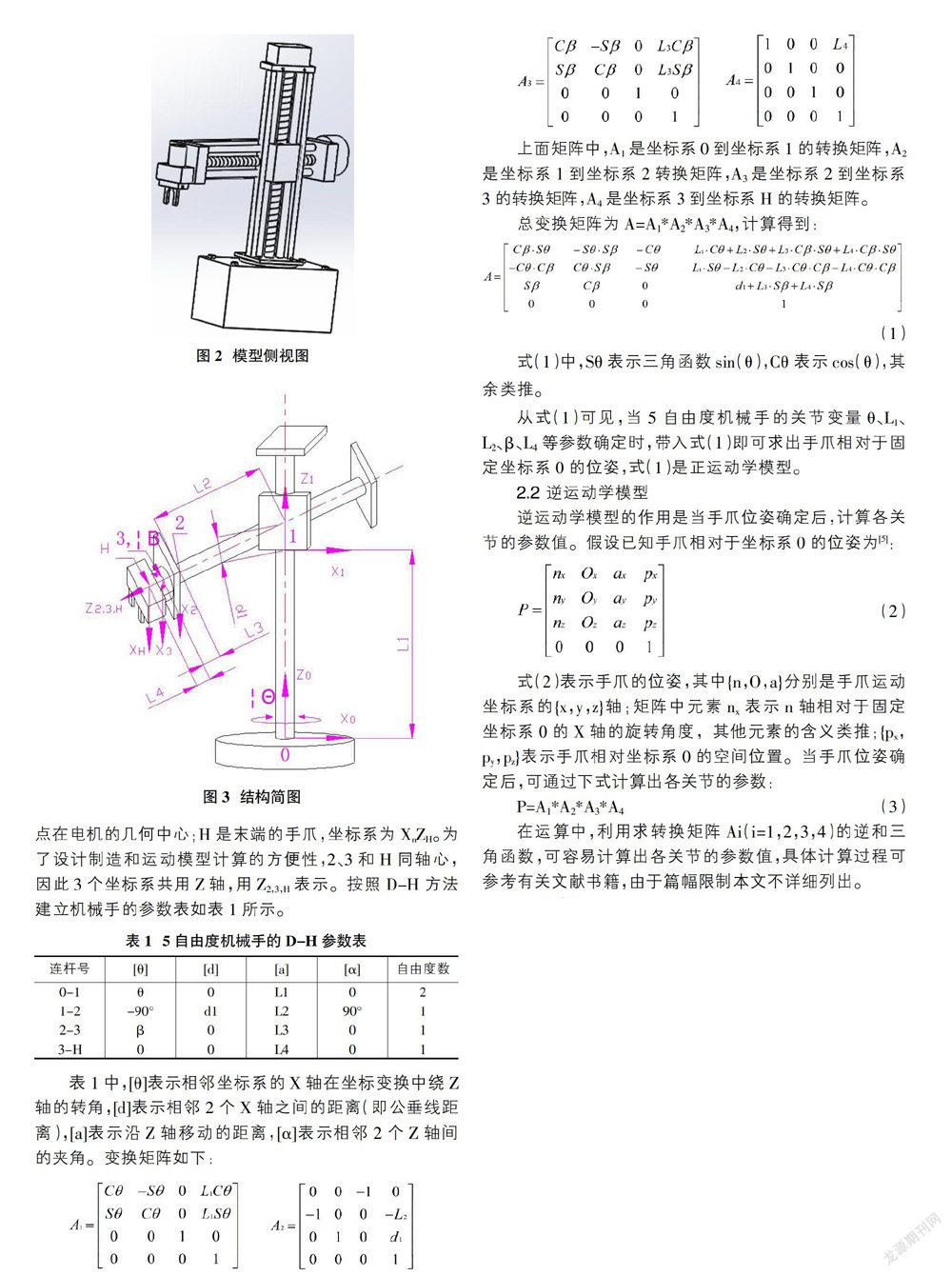
在该机械手系统中,底座通过螺栓固定在一定高度的工作台上,底座内装有旋转电机(1个转动自由度,转角范围0~180°);在旋转底座上,竖直方向安装有1根丝杠,通过丝杠上方电机的旋转,实现机械手在垂直方向的上下移动(1个垂直方向移动自由度),与丝杠平行安装的2根立杆起支撑作用;同样,在水平方向也安装有旋转电机、丝杠以及支撑杆,实现水平方向的左右移动(1个水平方向移动自由度);在末端,旋转电机在-45~45°范围内旋转(1个转动自由度),可根据工件取放时的位置调整旋转角度改变姿态;最末端是移动手爪,在气缸的驱动下移动并实现手爪张合(1个移动自由度),完成取放动作。为便于观察和分析,给出模型侧视图(图2)和结构简图(图3)。
2 运动模型的建立
2.1 正运动学模型
应用D-H方法建立机械手的坐标系如图3所示[4],其中0表示底座固定坐标系X0Z0的原点(按照D-H方法规则,Y0按右手规则确定,可不必表示出來,下同);1是实现垂直上下移动的滑座,坐标系为X1Z1,坐标原点在滑座底平面与垂直丝杠中心线相交的位置;2是水平移动丝杠的垫板,坐标系为X2Z2,坐标原点在垫板底平面与水平丝杠中心线相交的位置;3是旋转电机,坐标系为X3Z3,坐标原点在电机的几何中心;H是末端的手爪,坐标系为XnZH。为了设计制造和运动模型计算的方便性,2、3和H同轴心,因此3个坐标系共用Z轴,用Z2,3,H表示。按照D-H方法建立机械手的参数表如表1所示。
2.2 逆运动学模型
逆运动学模型的作用是当手爪位姿确定后,计算各关节的参数值。假设已知手爪相对于坐标系0的位姿为[5]:
3 结束语
通过开发出的一种基于PLC控制的教学用5自由度机械手,研究了该机械手的正逆运动学分析方法。利用实际的实验教学设备学习机器人的运动学知识,不仅增强了学生学习积极性,达到预期的教学效果,同时也为学生以后从事相关工作打下牢固基础。
参考文献:
[1]谢亚青.基于PLC的5自由度模块化气动搬运机械手研制[J].机械设计与制造,2009(01):180-181.
[2]高蕾娜.4自由度示教机械手构型设计与运动分析[J].实验室研究与探索,2016,35(07):44-46.
[3]吴晓雷.三自由度机械手运动学的研究[J].山东工业技术,2013(11):171-173.
[4]Saeed B Niku.机器人学导论[M].北京:电子工业出版社,2013.
[5]韩建海.工业机器人[M].武汉:华中科技大学出版社,2014.
