基于SVPWM的电动汽车永磁同步电机PI控制策略
2020-09-10王喆
王喆





摘要:根据永磁同步电机的结构特点建立了不同参考坐标系下的数学模型,并在Matlab/Simulink中建立了电机控制系统的仿真模型。针对传统PI控制策略超调量过大的问题,设计了一种PI与SVPWM联合控制策略。为了验证PI与SVPWM联合控制策略的性能,将其与PI控制、滞环电流控制进行了对比研究。结果表明,PI与SVPWM联合控制策略的超调量为17.7%,远小于PI控制策略的33.4%和滞环电流控制策略的65.18%,控制过程更加平稳。PI与SVPWM联合控制策略作为电动汽车专用PMSM控制器的控制策略,能够满足电机的运行要求。
Abstract: Based on the structure characteristics of PMSM, the mathematical models under different reference coordinate systems are established, and the simulation model of the motor control system is established in Matlab/Simulink. To solve the overshoot problem of traditional PI control strategy, a combined PI and SVPWM control strategy is designed. In order to verify the performance of the combined PI and SVPWM control strategy, it is compared with PI control and hysteresis current control. The results show that the overshoot of the combined PI and SVPWM control strategy is 17.7%, which is much smaller than 33.4% of the PI control strategy and 65.18% of the hysteresis current control strategy, and the control process is more stable. The combined PI and SVPWM control strategy, as the control strategy of PMSM controller for EV, can meet the operation requirements of the motor.
關键词:永磁同步电机;电动汽车;空间矢量脉宽调制;控制策略
Key words: permanent magnet synchronous motor(PMSM);electric vehicle(EV);space vector pulse width modulation (SVPWM); control strategy
中图分类号:TM341 文献标识码:A 文章编号:1674-957X(2020)22-0025-06
0 引言
电动汽车的快速普及以及日新月异的技术发展,也使得其对于电机电控技术的要求不断提高。鉴于电动汽车所需的性能要求,永磁同步电机以其优异的性能特点在该领域得到广泛应用[1-3]。其中,由于内置式永磁同步电机更能满足电动汽车对于高转速大扭矩的需求,因此得到国内外学者的广泛关注[4-7]。文献[8]为了更好地实现对以永磁同步电机为驱动电机的电动汽车车速的控制,设计了一套基于滑模控制的永磁同步电机控制系统。文献[9]针对永磁同步电机传统模型预测控制系统在低采样频率下,存在稳态电流波动较大的问题,该文提出一种基于占空比调制的模型预测电流控制策略。文献[10]针对传统永磁同步电机转速环PI控制下转速跟踪性能差的问题,设计一种复合PI无位置传感器应用于表贴式永磁同步电机转速环控制系统。为了解决上述方法存在超调量过大的问题,本文将根据永磁同步电机的工作原理建立永磁同步电机的数学模型,并在Matlab/Simulink中建立电机控制系统的仿真模型。针对电动汽车永磁同步电机,设计一种基于SVPWM的PI控制策略,并进行仿真研究。研究结果表明,PI与SVPWM联合控制策略能够满足电动汽车电机的运行要求。
1 永磁同步电机的工作原理
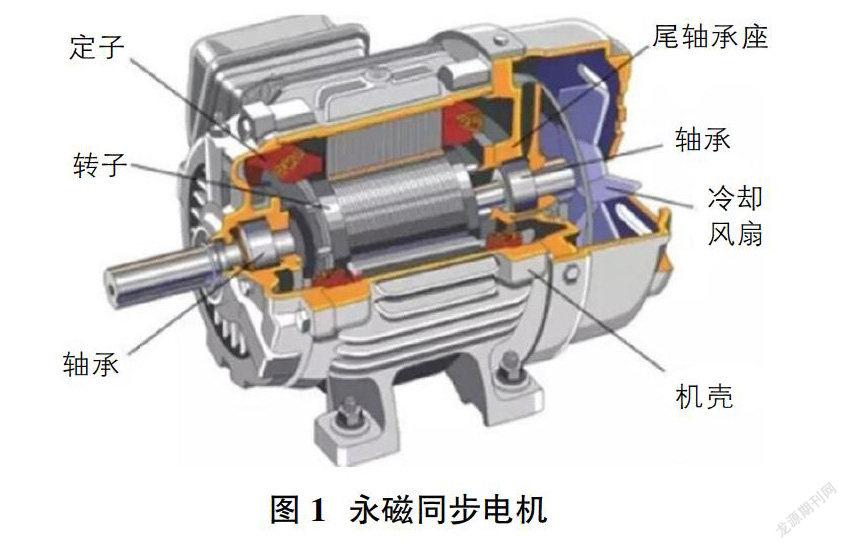
永磁同步电机的组成包括定子、转子、轴承、尾轴承座、冷却风扇和机壳等,如图1所示。由图1可知,定子就是指电机在正常工作下固定不动的部分,转子则是指电机在正常工作时旋转的部分。永磁同步电机由永磁体作为转子激发产生同步旋转磁场,三相线圈通过旋转磁场的电枢反应来产生三相对称电流。当三相对称电流在空间位置上相位差为2π/3时,就会产生空间中的旋转磁场,转子就会旋转。在此期间,电能完成了转化为动能的过程。
2 永磁同步电机的数学模型
永磁同步电机是复杂的非线性系统[11]。为方便求解永磁同步电机数学模型,使用三种坐标系,分别为三相静止坐标系A-B-C,两相静止坐标系α-β,以及两相同步旋转坐标系d-q,如图2所示。由图2可知,A轴根据定子绕组的物理位置确定,B轴与C轴分别与其成120°与240°;α轴与A轴重合,β轴与其垂直;d轴代表永磁体磁通方向,q轴与其垂直。
根据图2中永磁同步电机坐标系的几何关系,可以概括出三个坐标系之间的变换方法,主要是Clark变换和Park变换。在磁动势不变的前提下,建立的三相靜止坐标系到两相静止坐标系的变换称为Clark变换。
式中,Ld和Lq为d轴和q轴上的定子电感,?鬃d和?鬃q为d轴和q轴上的定子磁链,?鬃f为永磁体转子的磁链,ωr为转子旋转的角速度,R为定子电阻,p为永磁同步电机的磁极对数,k为电磁转矩系数。
不论是Clark变换,还是Park变换,均以总功率恒定为前提条件,因此电磁转矩方程中电磁转矩系数k为1。最终经过Park变换,获得两相同步旋转坐标系d-q下的永磁同步电机数学模型。建立电机控制系统之前,需要进行PMSM建模,包括PMSM型号设置、参数设置和高级设置。在PMSM型号设置中,设置电机相数为3,反电动势波形为正弦波,转子类型为凸极转子。在PMSM参数设置中,设置的参数如表1所示。在PMSM高级设置中,采用默认的采样时间,θ为0时的转子磁通位置设为“跟随A相”。
3 空间矢量脉宽调制
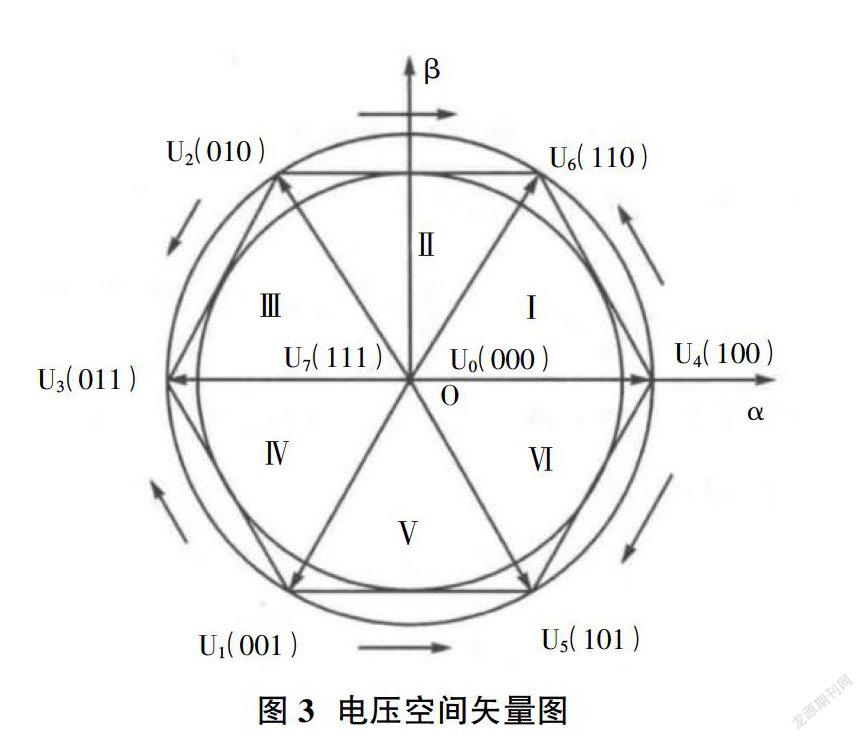
空间矢量脉宽调制(SVPWM)具有控制精度高、效果稳定、开关损耗小、易于数字化等优点,在电动汽车领域应用颇广[12]。目前的矢量控制策略主要包括电压法和电流法。电压法控制稳定性好、精度高,但实施起来相对复杂。电流法实施相对简单,但控制精度低且转矩波动大。为便于分析,研究SVPWM控制策略的前提是将电机与逆变器当作一个整体来考虑。电压空间矢量图如图3所示。
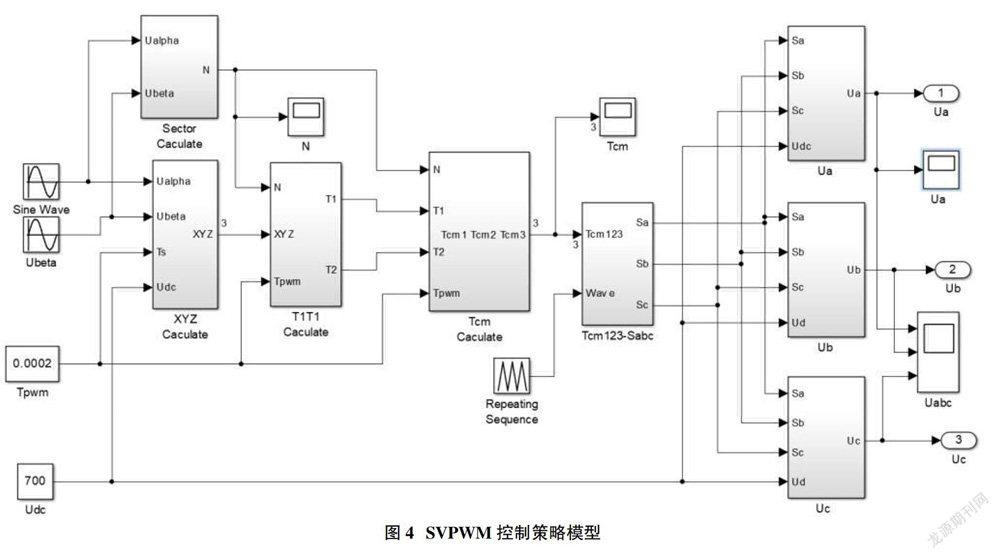
由于三相电压源逆变器的开关组合形式共有8种,在两相静止坐标系中分别表示为图3中的U0(000)、U1(001)、U2(010)、U3(011)、U4(100)、U5(101)、U6(110)、U7(111)。这样就产生了六个扇区,它们组成的正六边形区域无限逼近原有三相电机气隙中生成的圆形旋转磁链,最终在两相静止坐标系下的电机气隙中得到幅值不变的圆形磁链。利用Matlab/Simulink搭建的SVPWM控制策略模型如图4所示。
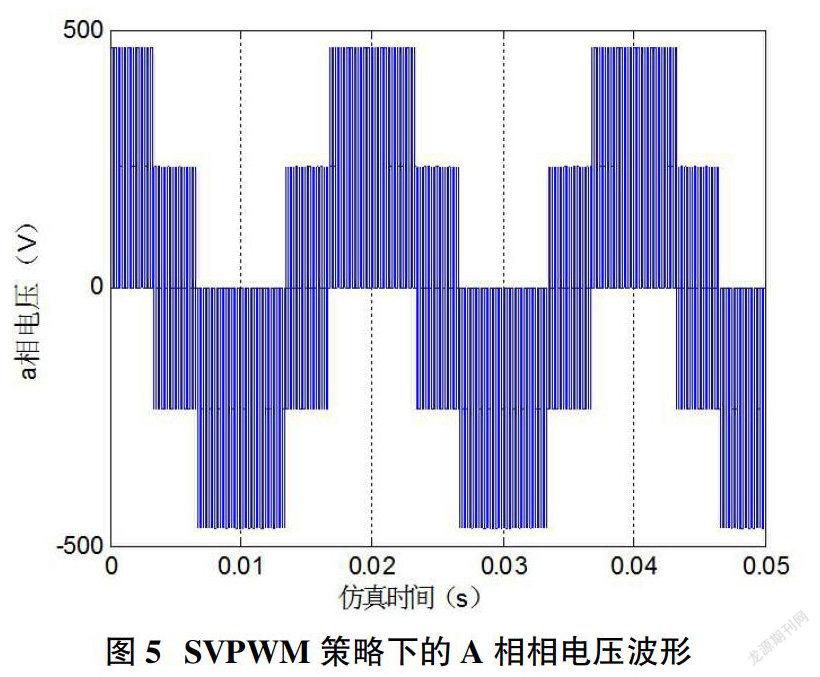
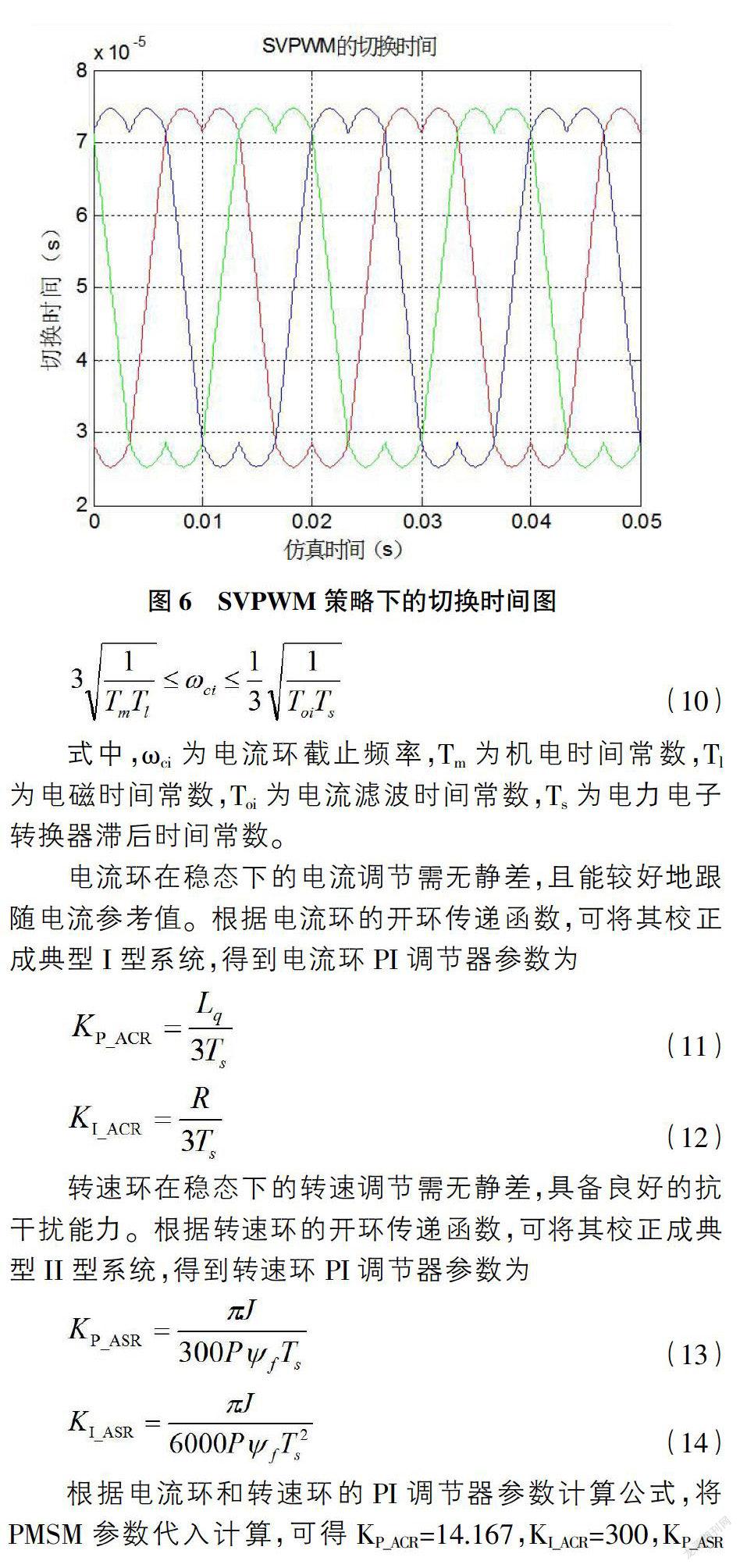
根据图4中的SVPWM控制策略模型进行仿真,得到A相相电压波形与切换时间图如图5、图6所示。由图5可知,相电压如同一个个矩形波有序排列而成,大体上呈现出正弦波的形状。这不仅符合SVPWM控制原理与过程,也表明SVPWM模拟输出的相电压信号是正确的。由图6可知,其调制波波形规则,呈马蹄状,这样能更好地利用直流电流,对逆变器输出电压的谐波分量具有较好的抑制作用。
4 PI控制
电动汽车多通勤于城市道路,在拥堵路段频繁地启停考验着电机的性能。因此,能否快速且平稳地达到跟车巡航速度,成为电动汽车制造厂商的研究重点。PID控制作为一种自动控制的闭环控制算法,是针对系统误差最为常用的调节方式。同步电机的转矩控制以及相对应的电流控制通常由比例积分(PI)控制器实现[13]。PI控制器设计包括了电流环与转速环的参数整定。
电流环用于改善动态跟踪的响应速度,通过对交轴电流iq进行控制,从而利用定子电流来控制电机转矩。在探讨电流环的PI参数设定前,为了便于分析,一般忽略反电动势对其的影响,并且对小惯性环节进行近似处理,其前提条件为式中,?棕ci为电流环截止频率,Tm为机电时间常数,Tl为电磁时间常数,Toi为电流滤波时间常数,Ts为电力电子转换器滞后时间常数。
电流环在稳态下的电流调节需无静差,且能较好地跟随电流参考值。根据电流环的开环传递函数,可将其校正成典型I型系统,得到电流环PI调节器参数为转速环在稳态下的转速调节需无静差,具备良好的抗干扰能力。根据转速环的开环传递函数,可将其校正成典型II型系统,得到转速环PI调节器参数为根据电流环和转速环的PI调节器参数计算公式,将PMSM参数代入计算,可得KP_ACR=14.167,KI_ACR=300,KP_ASR =0.11359,KI_ASR=28.397。利用Matlab/Simulink搭建的传统PI控制策略模型如图7所示。
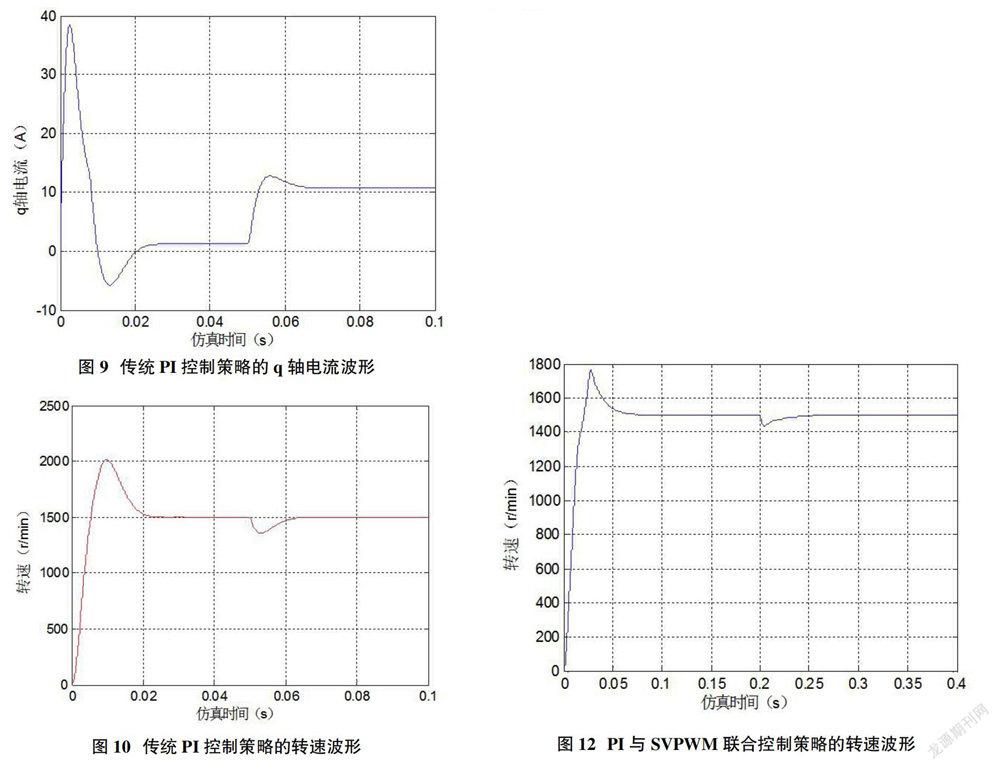
图7中的仿真条件为:参考转速为1500r/min,负载转矩TL初始值为0,在t=0.05s时的 TL设为10N·m。根据图7中的传统PI控制策略模型进行仿真,得到d轴和q轴的电流波形如图8和图9所示,q轴的转速波形如图10所示。由图8可知,d轴电流值在经过短暂振荡后等于0,在0.05s时由于增加10N·m的转矩负载,故产生了一次波动,但很快恢复至0。由图9可知,q轴电流值在零负载时经过一次振荡后近似等于0,这是因为此时的负载转矩为0,而在0.05s时由于增加的转矩负载,故q轴电流值逐步稳定在10A,这表明q轴电流控制着电机的转矩特性。由图10可知,转速在0.01s时达到最大值2000r/min,并在0.03s时恢复至参考转速1500r/min;在0.05s时因转矩负载的增加,所以转速有所小幅度下降,且在0.064s时恢复至参考转速1500r/min。这体现了传统PI控制策略能在一定程度上满足要求。
由传统PI控制策略的转速波形可以看出,传统PI控制在响应速度、稳定速度、抗干扰能力等方面具有优势,但其超调量过大,需要进一步改进。
5 基于SVPWM的PI控制策略
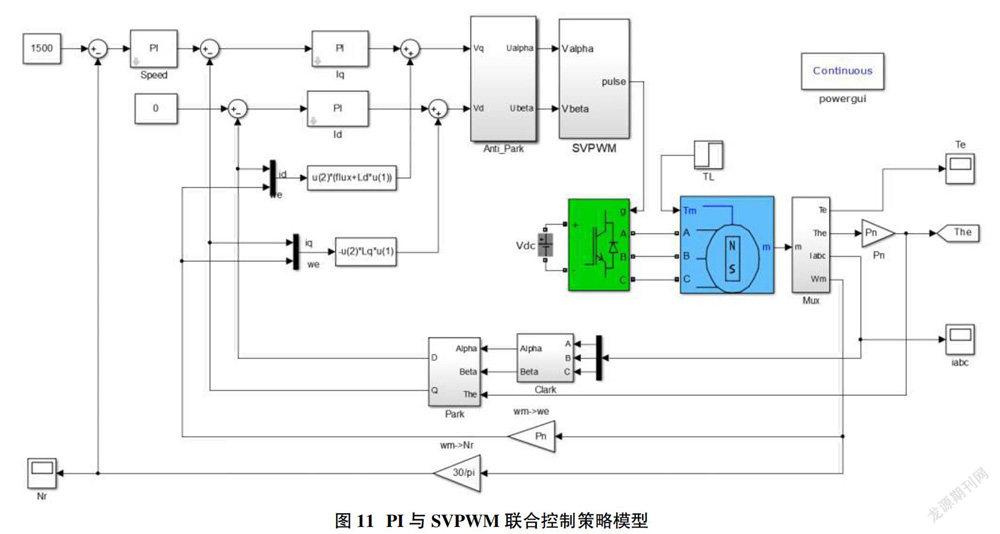
传统PI控制策略的超调量过大,因此引入SVPWM控制策略对其加以改进,称为PI与SVPWM联合控制策略,其仿真模型如图11所示。图11中的Speed PI调节器参数为转速环的PI参数,Id PI调节器和Iq PI调节器参数为电流环的PI参数。模型仿真条件为:参考转速为1500r/min,负载转矩TL初始值为0,在t=0.2s时,负载转矩TL设为10N·m。
根据图11中的PI与SVPWM联合控制模型进行仿真,得到转速波形、三相电流波形和转矩波形,如图12、图13和图14所示。由图12可知,转速在0.03s时达到最大值1758r/min,并在0.07s时恢复至参考转速1500r/min。联合控制策略的响应速度与传统PI控制策略相比略有逊色,但未出现大幅高频振荡,超调量也在一定程度上得到抑制,由此可见联合控制策略侧重于控制过程的平顺性。由于转矩负载的增加,转速在0.05s时略有下降,但幅度很小,且恢复过程较为平缓,这表明联合控制策略具有优异的抗干扰能力。从转速方面进行综合分析,PI与SVPWM联合控制策略能满足电机的运行要求。
由图13可知,电流在零负载时经过0.05s的振荡后稳定保持小幅度的三相电流,这段时间的三相电流波形较为规整,且呈现明确的收缩趋势,这就说明电流带来的噪声频率不会有大幅波动。在此后的零负载情况下电机电流输出稳定,一直保持在较小的电流值上。由于在0.2 s时转矩负载10N·m的增加,电流立刻能呈现为正常的三相波形并保持稳定,且波动更小。由图14可知,转矩波形经过多次不规则振荡后,在0.07s开始便在零转矩附近小幅度高频振动,这说明永磁同步电机在稳定状态下输出的转矩保持在一定范围内。由于转矩负载在0.2s时增加到10N·m,输出转矩经过一定的超调后,在0.02s时恢复到参考转矩,并保持在稳定状态。
为了进一步阐明PI与SVPWM联合控制策略性能,将其与滞环电流控制进行了对比研究。滞环电流控制作为不依赖电机参数的闭环控制,具有不错的鲁棒性,该控制方法逆变器包括转速環和一个采用滞环控制的电流闭环。三种控制策略转速波形的基本参数对比如表2所示。由表2可知,PI与SVPWM联合控制策略的超调量为17.7%,远小于PI控制策略的33.4%和滞环电流控制策略的65.18%,虽调整时间较长,但控制过程更加平稳。对于电动汽车,首先考量的是它的舒适性与操纵平顺性,PI与SVPWM联合控制策略作为电动汽车专用PMSM控制器的控制策略,能在更大程度上满足电机的运行要求。
6 结论
根据永磁同步电机的工作原理建立了永磁同步电机的数学模型,并在Matlab/Simulink中建立了电机控制系统的仿真模型。针对电动汽车永磁同步电机,设计了一种PI控制器,并进行了仿真研究。仿真结果表明PI控制在响应速度、稳定速度、抗干扰能力等方面具有优势,但超调量过大,因此利用矢量控制方法对其加以改进,从而提出了PI与SVPWM联合控制策略。为了验证PI与SVPWM联合控制策略的性能,将其与PI控制、滞环电流控制进行了对比研究。PI与SVPWM联合控制策略的超调量为17.7%,远小于PI控制策略的33.4%和滞环电流控制策略的
65.18%,虽然调整时间较长,但控制过程更加平稳。对于电动汽车,首先考量的是它的舒适性与操纵平顺性,PI与SVPWM联合控制策略作为电动汽车专用PMSM控制器的控制策略,能在更大程度上满足电机的运行要求。
参考文献:
[1]赵明星.电动汽车永磁同步轮毂电机直接转矩模型预测控制研究[D].长春:吉林大学,2018.
[2]姚超,陆海斌.电动汽车用永磁同步电机性能参数仿真[J]. 微电机,2019,52(1):21-25.
[3]胡耀华.电动汽车用内置式永磁同步电机的研究[D].南京:南京航空航天大学,2017.
[4]龚贤武,马建,徐淑芬,等.电动汽车用永磁同步电机高效快响应控制策略[J].中国公路学报,2014,27(5):171-176.
[5]Errouissi R, Al-Durra A, Muyeen S M. Experimental validation of a novel PI speed controller for AC motor drives with improved transient performances[J]. IEEE Transactions on Control Systems Technology, 2018, 26(4): 1414-1421.
[6]徐恺.电动汽车永磁同步电机动态最大转矩电流比控制方法研究[D].成都:电子科技大学,2018.
[7]陈揆能,梁明,丁建平,等.电动汽车用永磁同步电动机动态性能的改善[J].微电机,2014,47(8):11-14.
[8]罗川宁,郝润科,杨威,等.电动汽车中永磁同步电机转速的控制[J].测控技术,2018,37(1):51-54.
[9]刘佳敏,葛召炎,吴轩,等.基于占空比调制的永磁同步电机预测电流控制[J].中国电机工程学报,2020,40(10):3319-3327.
[10]李恒江,董鑫,魏海峰,等.表贴式永磁同步电机转速环复合PI无位置传感器控制[J].电工技术学报,2020,35(10):2119-2129.
[11]张厚升,李震梅,边敦新,等.电动汽车用三相开绕组永磁同步电机的控制及容错运行[J].吉林大学学报(工学版),2020,50(3):784-795.
[12]於锋,朱晨光,吴晓新,等.基于矢量分区的永磁同步电机三电平双矢量模型预测磁链控制[J].电工技术学报,2020,35(10): 2130-2140.
[13]程静,蔡华祥,陈强,等.永磁同步电机参数自整定及参数辨识技术研究[J].微电机,2020,53(1):101-105.
