RV减速器主轴承受力分析与仿真
2020-09-10师坤峰
师坤峰




摘要:主轴承作为RV减速器的关键支撑部件,其性能与寿命直接影响减速器的工作性能、可靠性和安全性。本文结合RV减速器的结构特点,完成对RV减速器的整机受力分析。基于Romax Designer仿真分析软件,建立三维等效模型并对模型进行静力学仿真,进一步对主轴承受载时的接触状态进行分析。
关键词:RV减速器;主轴承;接触分析;寿命
中图分类号:TH132.46 文献标识码:A 文章编号:1674-957X(2020)22-0042-04
0 引言
RV(Rotary Vector)减速器作为一种小体积、大传动比、高运动精度、高刚度的减速器,由渐开线行星齿轮减速机构和摆线针轮行星减速机构两部分构成[1],主要用于20公斤以上的工业机器人关节。
主轴承作为RV减速器的关键支撑元件,其性能与寿命直接影响减速器的工作性能、可靠性和安全性[2]。随着“中国制造2025”的实施和推进,对主轴承的性能提出了更高的要求,虽然我国轴承研究已经取得骄人进展,但与国外仍存在差距。国外对RV减速器用轴承的相关制造技术进行封锁,而国内RV减速器零部件的研究主要集中在摆线轮和曲柄轴[3],关于主轴承的相关研究较少。对此,本文结合RV减速器的结构特点,对RV减速器用主轴承进行理论和仿真分析,为主轴承的设计分析提供参考。
1 RV减速器传动原理及轴承种类
RV减速器中,渐开线中心轮沿顺时针方向旋转,小渐开线行星齿轮在公转的同时还有逆时针方向自转,并通过花键与曲柄轴相连,传递扭矩给摆线针轮减速机构,带动摆线轮做偏心运动,摆线轮在绕其轴线公转的同时,还将反向自转,做顺时针运动,通过曲柄轴推动法兰盘做顺时针转动输出[4]。
RV减速器基本结构如图1所示,其内部主要有支撑摆线轮片相连的滚针轴承、支撑曲柄轴的圆锥滚子轴承以及支撑减速器所有负载及转矩的角接触球轴承。对于工业机器人来说,较高的轻量化设计要求决定了RV减速器需要有紧凑的结构[5],因此RV减速器在生产制造时一般选用特殊制造的非标准薄壁轴承,同时将轴承的内圈直接加工在输入、输出法兰盘表。
2 受力分析
内部受力分析主要计算RV减速器在以某转矩输出时,减速器内部各零部件的相互作用力,经过分析推导,可得到曲柄轴支撑轴承与支撑、输出法兰盘的作用力。进行外部受力分析时,需确定好外部负载的作用点以及主轴承的基本尺寸,结合内部受力分析得到的支撑、输出法兰盘的作用力,沿RV减速器主轴线建立水平、竖直两平面的力与力矩平衡方程,得到减速器主轴承的具体受力情况。
在针齿壳固定情况下,以x坐标轴右侧,y坐标轴下侧为正,力的平衡方程为:
3 实例分析
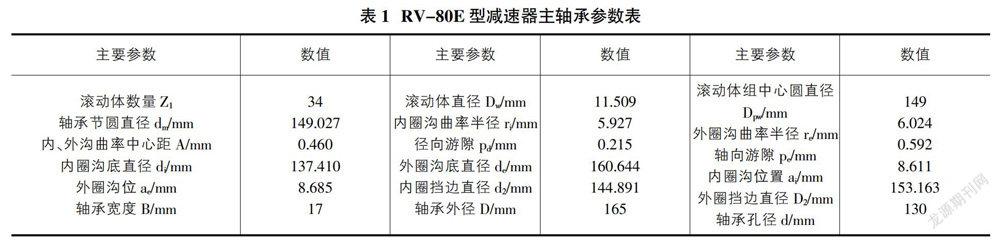
以纳博特斯克RV-80E型减速器主轴承为例,其具体参数见表1。
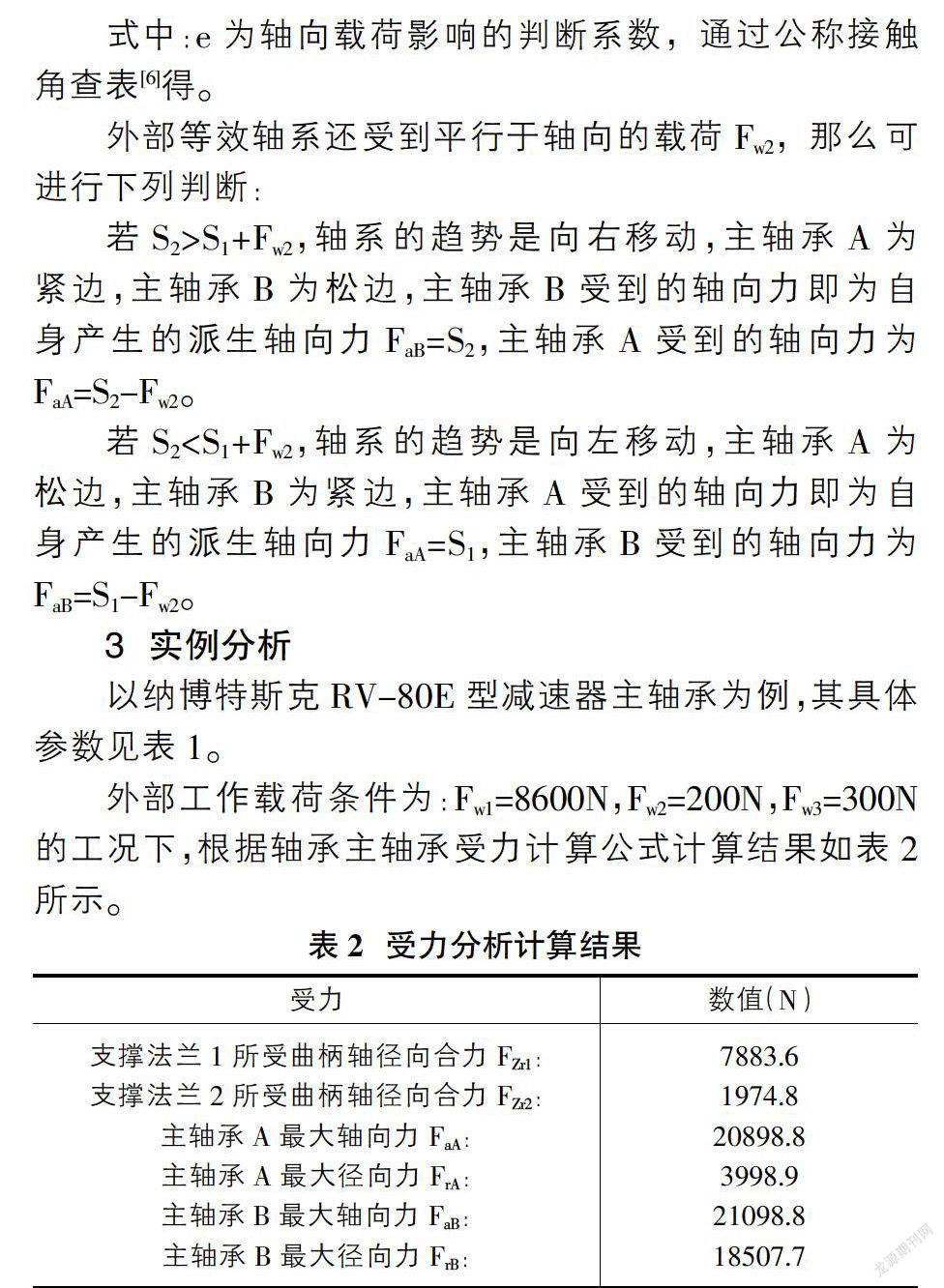
外部工作载荷条件为:Fw1=8600N,Fw2=200N,Fw3=300N的工况下,根据轴承主轴承受力计算公式计算结果如表2所示。
4 主轴承静力学仿真
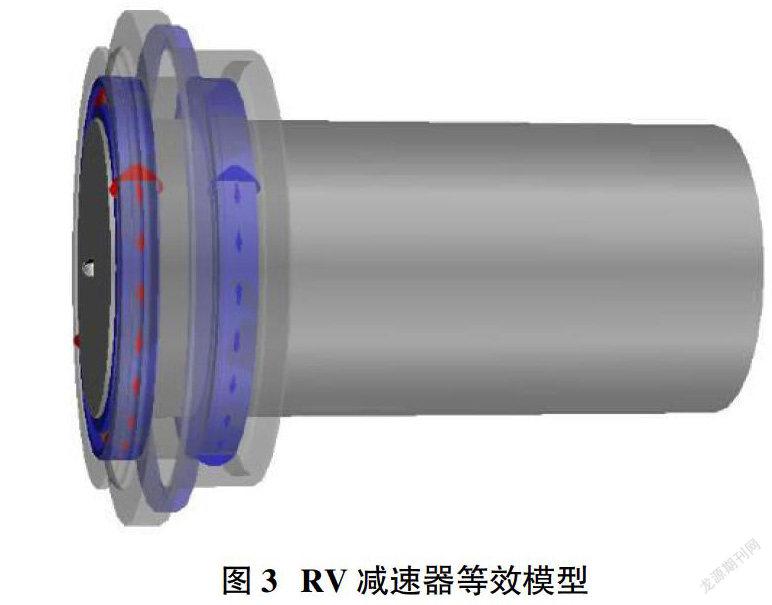
本文使用Romax Designer完成RV减速器等效模型的几何建模,将输入、输出法兰等效成轴,上文中已对主轴承受力来源进行分析,故可将摆线轮、曲柄轴等简化,为了更加真实反映边界条件,在轴承外圈添加针齿壳,但是不作为详细分析对象。
4.1 加载定义
轴承选用GCr15,其材料的参数为:杨氏模量2.08E+11Pa,泊松比0.3,密度7.81×103(kg/m3),轴承外圈刚性连接在针齿壳内圈,针齿壳设置为接地。轴承内圈装配在轴上,建立好的等效模型如图3。
根据第二节受力分析和第三节可执行程序的计算结果,将载荷添加在模型中,考虑各轴段以及负载质量的重力效应,设置重力矢量为(0,0.9807,0)m/s2。设置工况为:环境温度为45℃,速度15rpm,扭矩784Nm。加载完毕后,对模型进行求解分析。
4.2 仿真结果分析
主轴承在受到联合负载时会产生两个方向的位移和倾覆角,主轴承的尺寸参数,滚动体填充个数以及承受载荷大小都会对位移量产生不同程度的影响。不同的位移量(尤其是倾覆角度)会导致主轴承内圈与外圈的基础状态和接触位置发生改变,进而使主轴承的实际接触角、滚动体载荷分布以及接触变形量发生变化,对滚动体与内、外滚道间的表面接触应力及寿命有重要影响。为了研究受载时主轴承内部接触状态,对滚动体与滚道间的载荷情况进行了分析,如图4所示。
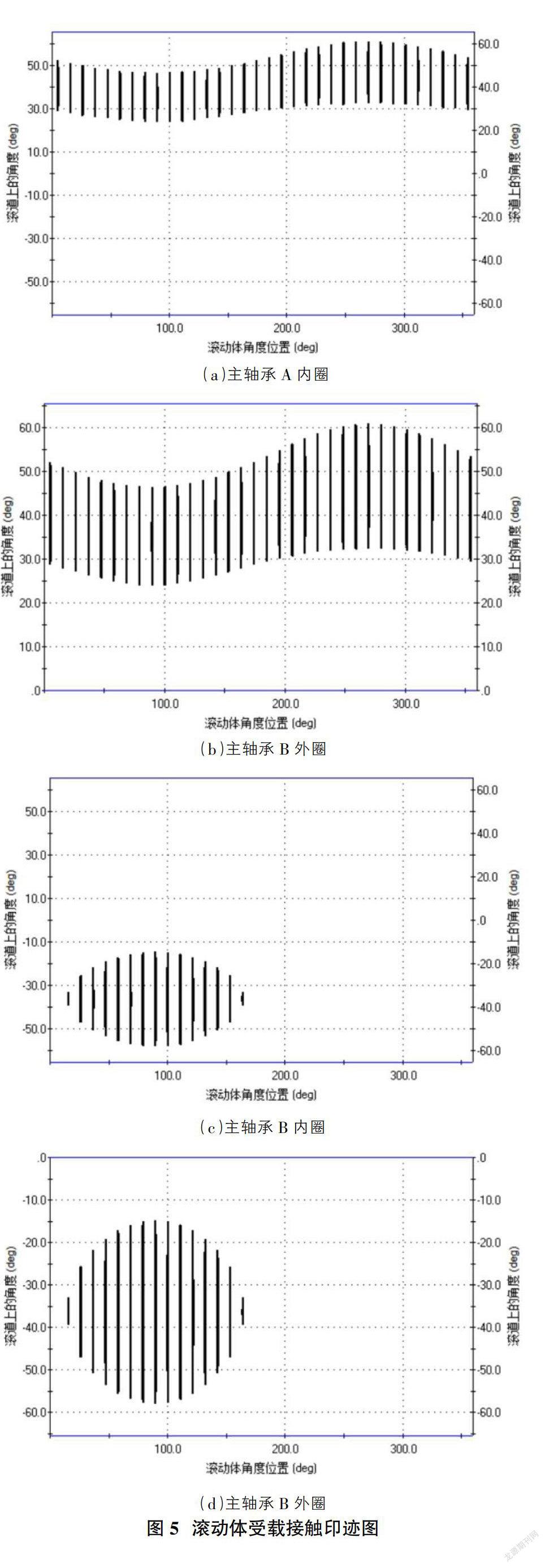
因为内、外圈接触载荷几乎相等,周向载荷分布线也基本相同,主轴承A因较大的轴向力导致滚动体全体受载,而主轴承B因受到较大的倾覆力矩的影响,滚动体仅在30~150°范围内受載,且受载个数为19个。同时主轴承A、B的最大载荷分别在90°和270°处取得,且主轴承B的载荷大于主轴承A,受载之前,球轴承为点接触,受载之后,滚动体与内、外滚道接触发生变形。因接触椭圆半短轴b过小,Romax接触印记图像只显示半长轴a,滚动体受载接触印记如图5所示。
对于单个轴承而言,滚动体与内、外圈滚道接触变形几乎相同,轴承A的滚动体因全体受载,半长轴a的波动不大,轴承B的滚动体载荷区小于180°,半长轴a在载荷区内有较大的变形量,随着滚动体接触位置的改变,接触印迹逐渐接近挡边但并没有发生椭圆截断现象。滚动体与滚道间接触区的接触变形以及最大接触应力数值如表4所示。
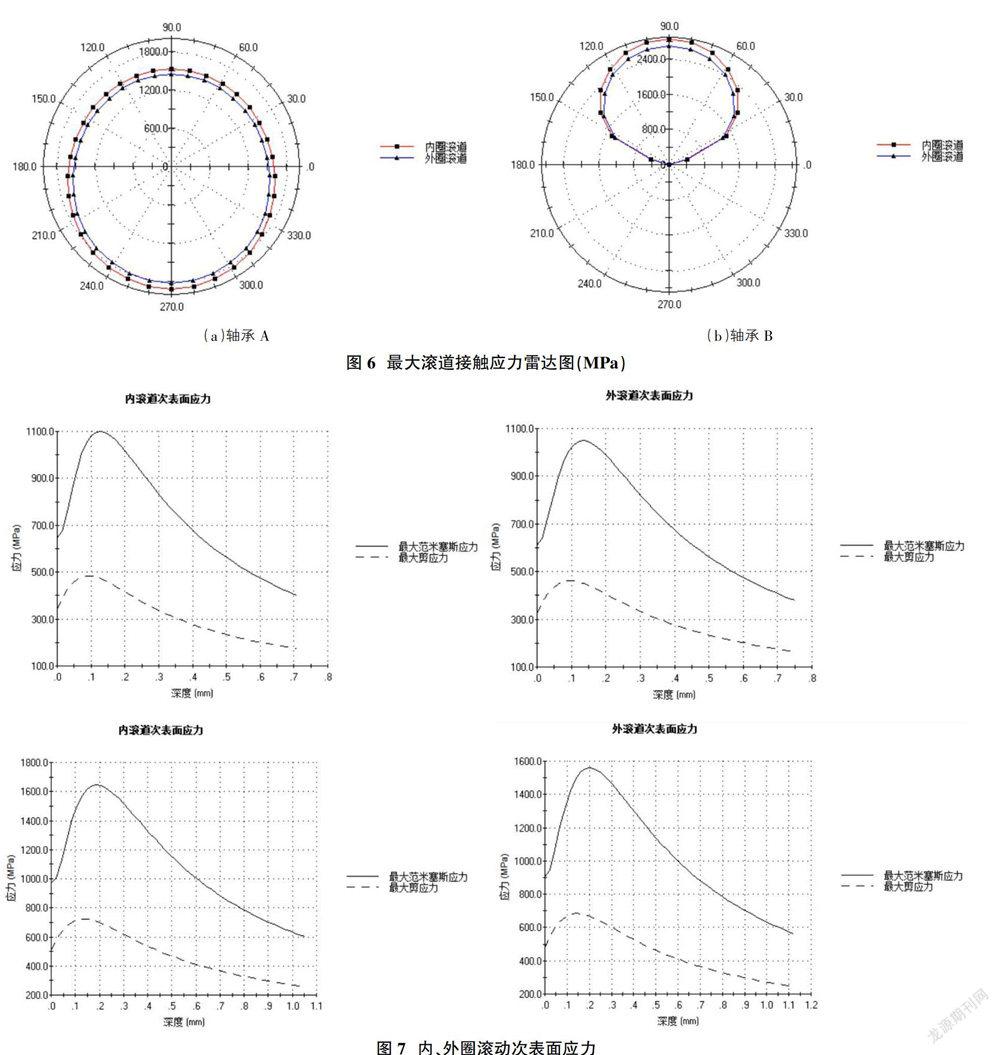
对于RV减速器主轴承内、外圈相比,表面接触应力及次表面应力较小;因为部分滚动体受载,主轴承B的两种应力值均大于主轴承A,但均小于应力安全极限4200N。滚道表面最大应力分布如图6所示。
主轴承内、外圈次表面应力如图7所示,最大次表面应力(范米塞斯)发生在接触表面下载0.15~0.22mm处,大小约是表面最大接触应力的57%,且随载荷的增加,最大应力发生深度有下沉趋势。最大次表面应力发生在主轴承B的外圈接触区,最大次表面应力为1645.5MPa。
5 结论
本文通过建立RV减速器主轴承受力模型,对RV减速器主轴承进行了受力分析,计算得到主轴承详细受力情况。综合受力模型和理论计算结果并结合Romax软件,对RV减速器等效模型进行静力学仿真分析,通过静力学仿真具体分析了在给定工况下主轴承内外滚道的载荷分布状态、接触印记和次表面应力,得到主轴承A和主轴承B最大载荷处分别为270°处和90°处,最大载荷为1912.7N和2862.2N。通过对载荷分布和接触区尺寸的分析验证了该型号轴承在工作载荷下接触应力远小于GCr15的许用应力4200N,确认了几何参数设置的合理性。为主轴承运转特性分析提供了良好的理论基础与仿真支撑,有助于加快RV减速器研发设计进程,对于研究RV减速器的受力分析具有重要的意义。
参考文献:
[1]李泽强,卢阳,杨立光,张少龙,冯武雷.机器人用摆线减速器关键零部件建模与装配[J].装备制造技术,2015(01):24-27.
[2]王强.三环减速器的数字化建模运动仿真及实验研究[D].河南科技大学,2014.
[3]王东峰,姜韶峰,张振强,刘胜超,何崇光.工业机器人RV减速器专用精密轴承技术分析[J].轴承,2018(05):7-11.
[4]刘珂荧,吴鑫辉,冯长建,李文龙.机器人用RV减速器曲柄轴弯曲应力分析[J].大连民族大学学报,2018,20(03):222-226.
[5]叶小芬,祝敏,陳馨雯,孟永帅,宫峰.RV传动机构作用力分析研究[J].机械传动,2019,43(08):107-115.
[6]王文斌.机械设计手册.第3卷,机械零部件与传动设计(二)[M].北京:机械工业出版社,2004.
