基于V模式的智能SCR软件开发及应用
2020-09-10黄永鹏刘星叶宇梁郑岳
黄永鹏 刘星 叶宇 梁郑岳




摘要:为满足非道路国四排放标准对柴油机排气污染物NOx限值的要求,结合基于模型开发的设计思想和V模式开发流程,完成了从需求架构设计、MATLAB/Simulink建模开发、软件测试确认的智能SCR软件开发。智能SCR软件的控制策略主要包括催化器模型、前馈控制模型、氨存储计算模型、尿素量修正模型、尿素喷射控制模型等。然后将智能SCR软件与柴油机其它控制功能进行软件集成,并将生成的ECU软件刷写至非道路国四ECU。最后在试验台架上完成了多组冷机和暖机的非道路瞬态循环(NRTC循环)测试。试验结果表明:在NRTC试验循环下,NOx转化效率最高达到了94.46%,经催化还原后的NOx排放值达到了0.464g/(kW·h),低于非道路国四排放标准对排放物NOx的排放限值要求,开发的智能SCR软件可以批量应用于非道路国四柴油机。
Abstract: A order to meet Non-Road T4 emission standard for requirements of diesel engine exhaust pollutants NOx limits, combined with the model-based design idea and the V-model development process, an intelligent SCR software from requirement and architecture design, MATLAB/Simulink modeling development, software testing and validation is completely developed. Control strategy of the intelligent SCR software is mainly included catalytic converter models, feed forward control models, NH3 storage and calculation models, urea quantity correction models, urea injection control models, etc. The intelligent SCR software is integrated with other control functions of diesel engine, and the generated ECU software is written into a Non-Road T4 ECU. It is tested finally several times with cold and warm Non-Road Transient Cycles (NRTC) on a test bench. The test results show that under NRTC test cycle, the NOx conversion efficiency reached the highest 94.46%, and the NOx emission value after catalytic reduction reached 0.464g/(kW·h), which was lower than the NOx emission limit of non-road T4 emission standard, the developed intelligent SCR software can be applied to the series product of non-road T4 diesel engines.
關键词:非道路国四排放;基于模型开发;V模式开发流程;智能SCR软件;NRTC循环
Key words: non-road T4 emission;model-based development;V-model develop process;intelligent SCR software;NRTC cycle
0 引言
随着环境问题的日益突出,针对道路用汽车和非道路移动机械用柴油机的污染物排放法规逐步完善,其对氮氧化物(NOx)和颗粒物(PM)等柴油机排气污染物的排放限值都作出了严格的要求。非道路国四阶段的排放法规对额定净功率在130kW至560kW之间的非道路用柴油机的NOx污染物排放限值要求已经达到了2.0g/(kW·h)。选择性催化还原(SCR)技术作为减少柴油机NOx排放的重要尾气后处理技术[1],已广泛应用于道路车辆、工程机械等领域[2]。
由于非道路移动机械对柴油机的采购成本较敏感,无论是采用国际知名电控燃油系统供应商提供的非智能型后处理系统控制方案,还是使用单独的后处理控制器控制智能型后处理系统,都不利于对柴油机成本的控制,因此通过自主研发既能控制智能型后处理系统,又不需要增加单独的后处理控制器的集成式智能SCR软件,为企业在达标排放法规要求下,推动后处理系统标准化、降低后处理系统配套门槛及有效控制柴油机成本提供了一个良好的方式。
1 后处理系统介绍
如图1所示为一种非道路国四后处理系统结构示意,该后处理系统的技术路线为DOC+DPF+SCR,其主要电控零部件包含通过CAN总线控制的智能尿素泵、集成了尿素液位温度品质传感器的尿素箱、DOC上游温度传感器、DPF上游温度传感器、DPF压差传感器、SCR上游温度传感器、下游NOx传感器等。
该后处理系统的工作原理为:当柴油机运行时,集成在ECU中的智能SCR软件将根据柴油机当前的运行状态,通过CAN报文的形式向智能尿素泵发送相应指令,并由智能尿素泵独立完成系统初始化、怠速等待、建压、休眠、等待喷射、喷射、反抽、尿素管路加热、防冻液解冻等工作。其中,智能SCR软件负责采集后处理系统各个温度传感器信号、压差传感器信号、NOx传感器信号、尿素液位温度品质传感器信号和与柴油机运行工况相关的参数,然后通过催化器模型、前馈控制、氨存储计算、自适应修正等控制算法计算出理论的尿素喷射量,并将其按照一定的CAN报文格式发送到CAN总线网络中。智能尿素泵从CAN总线网络中接收到尿素喷射量报文后,按照设定的喷射压力和喷射频率驱动尿素喷嘴工作。尿素溶液在柴油机高温尾气下发生蒸发、热解和水解等反应后生成NH3,然后NH3与上游尾气中的NOx经混合器充分混合后,进入SCR催化器进行催化还原反应生成N2和H2O,从而实现降低柴油机NOx排放的目的[3]。
尿素溶液的热解、水解和SCR系统的氧化还原反应机理为[4]:
(NH)CO→NH+HNCO (1)
HNCO+HO→NH+CO (2)
6NO+4NH→5N+6HO (3)
4NO+4NH+O→4N+6HO (4)
NO+2NH+NO→2N+3HO (5)
式(1)至(5)中,(NH)CO為尿素溶液;NH为氨气;HNCO为异氰酸;HO为水;CO为二氧化碳;NO为一氧化氮;N为氮气;O为氧气;NO为二氧化氮。
2 智能SCR系统控制策略开发
2.1 V模式开发流程
由于汽车电子行业的传统开发流程已经很难适应日益多样化的功能需求和复杂的控制算法开发要求[5],而采用基于模型开发的V模式开发流程能够在保证较高软件质量的情况下,缩短开发周期,降低开发成本,以及在开发阶段完成对模型的验证,实现模型和代码的更新同步,因此高效及标准化的V模式开发流程被广泛应用于汽车电子软件开发领域[6-7]。
图2为结合自主软件开发工程化经验设计的非道路国四智能SCR软件的V模式开发流程。该开发流程除了包含需求设计、架构设计、模型设计、软件实现、单元测试、集成测试、验收测试等完整的基于模型开发的内容之外,还使用了行业内知名的管理工具对软件需求、软件配置、软件测试、软件变更等进行管理,从而使智能SCR系统控制策略开发过程得到有效管控,使其软件的开发质量得到切实保证。
2.2 软件需求架构设计
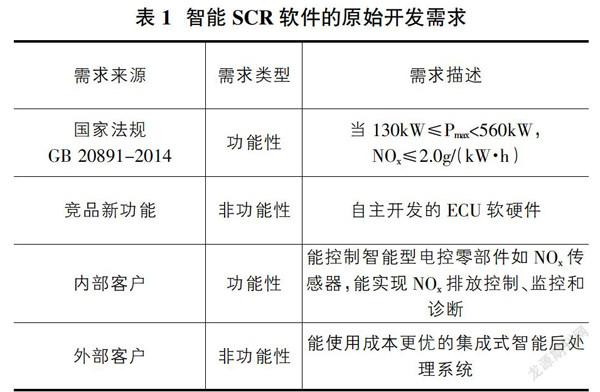
需求开发包含需求捕获和需求分析。需求的来源可以是国家的相关排放法规、行业内新技术、竞品新功能、内部客户和外部客户的开发需求、非功能性需求等,其内容不仅涉及软件需求,而且还涉及对硬件资源等的需求。
如表1所示,为软件开发人员从各相关方收集的部分智能SCR软件的原始开发需求。软件开发人员将对所有的原始开发需求进行分析,并形成规范的需求规格说明书,用以明确软件开发的内容和指导软件开发的工作[8]。
软件架构是软件系统的一个核心,它对软件的功能、特性和结构都起到决定性的作用。由于通过对软件架构的设计可以将软件需求转化为软件模型,因此软件架构是一种抽象解决软件需求的方案[9]。此外,软件架构设计需要遵循分层设计、模块划分、低耦合高内聚、接口控制等原则[10]。
通过对非道路国四排放法规、竞品新功能、用户需求、非功能性需求等需求来源进行分析,形成了完善的智能SCR软件开发需求规格说明,并遵循软件架构的设计原则和基于模型开发的设计思想,得到了如图3所示的智能SCR系统应用层软件架构设计方案,其由传感器信号采集及处理模块、SCR接口模块、SCR控制策略模块、尿素喷射模块和COM模块组成。
传感器信号采集及处理模块中包含尿素液位温度品质传感器模型、SCR上游温度传感器模型、SCR下游NOx传感器模型等。SCR接口模块从ECU的其它功能模块接收发动机当前运行状态、转速、扭矩、排气质量流量等信息。SCR控制策略模块由SCR温度模型、SCR催化器模型、SCR前馈模型、SCR自适应模型、氨存储计算模型、SCR状态机模型等组成。COM模块中包含尿素泵运行状态信息、尿素泵故障信息、维修保养信息等CAN报文接收模型及与发动机和环境信息、SCR上游温度信息、尿素喷射量信息等相关的CAN报文发送模型。
2.3 软件建模开发
软件开发人员根据软件需求规格说明书和软件架构设计方案中的详细设计描述,即可借助MATLAB/Simulink软件开展智能SCR软件控制策略的建模开发工作。
智能SCR软件控制策略原理示意如图4所示,其通过采集SCR上游温度传感器信号用于计算SCR温度模型,并将SCR温度传递给氨存储模型用于计算氨存储值,通过SCR模型计算上游NOx浓度值,然后通过SCR模型中的转化效率模型计算出转化效率值,并传递给前馈控制模型用于计算NH3基础值,此时,经过SCR自适应模型计算的NH3修正因子对NH3基础值进行加权,然后传递给尿素喷射控制模型用于计算尿素溶液理论喷射量,最终获得的尿素喷射量将通过COM模块发送给智能尿素泵,并由智能尿素泵根据发动机当前的运行工况进行实时的尿素喷射。
2.4 软件测试确认
当单元测试完成后,一般会采用黑盒测试技术对两个以上的模块进行自下而上或自上而下的分阶段、递进式的集成测试。
当完成集成测试后,将对软件进行功能级的测试确认,以确保开发的软件功能满足开发需求。
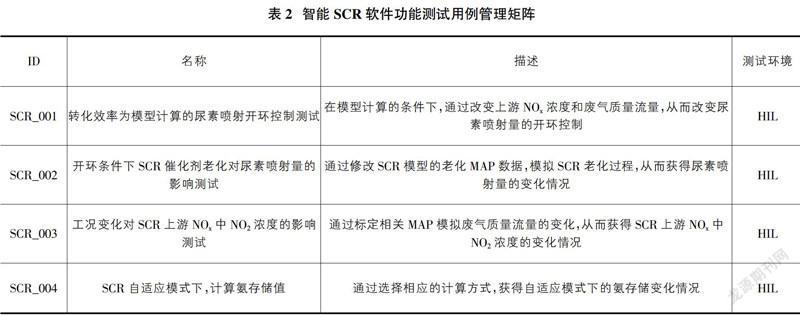
如表2所示为根据智能SCR软件功能需求开发的,并在硬件在环仿真测试系统(Hardware -in-the-loop,HIL)上进行测试验证的部分功能级别测试用例管理矩阵。在对软件进行功能级别的测试前,软件测试人员将在管理矩阵中挑选合适的测试用例集,并根据测试用例中详细定义的测试步骤、操作内容和期望的测试结果开展测试工作。
当软件的功能模块较多,手工测试效率不高的缺点将凸显,这时引入自动化测试工具及管理流程可以缩短测试周期及提高软件质量[11]。本文根据智能SCR系统控制策略的开发需求,并结合自动化测试工具自主研发了SCR功能模块、CAN报文模块、故障管理模块、掉电保存功能模块等一系列自动化测试用例及测试脚本,并在HIL上对智能SCR软件的各项功能进行了测试确认。同时,使用缺陷管理工具对测试过程中发现的缺陷进行管理,并用于指导软件缺陷的修复和回归测试。
3 台架试验验证
3.1 试验样机及方案
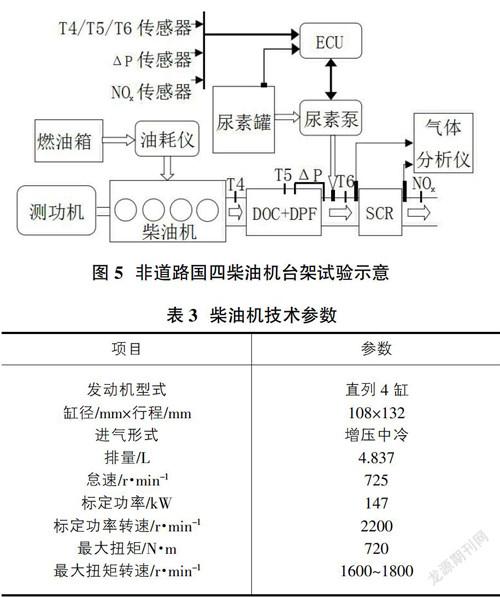
非道路国四标准GB 20891-2014增加了对瞬态试验循环(Non-road transient cycle,NRTC)的定义,该试验循环包含了1238个逐秒变化的工况[12]。本文以某直列4缸柴油机为样机,如图5所示搭建试验台架,采用AVL GEM301EC测试平台进行NRTC试验循环,以验证自主开发的智能SCR软件对非道路国四柴油机尾气污染物NOx的减排效果。柴油机技术参数见表3。
当智能SCR软件完成验收测试后,将与柴油机其它控制功能一起进行软件代码集成。当软件調试通过后,将生成可执行的目标代码ECU.hex文件和ECU.a2l文件。最后通过标定工具INCA刷写到非道路国四柴油机的ECU中,并采用NRTC试验循环对集成了智能SCR软件的非道路国四柴油机进行多组冷机和暖机测试验证。
此外,还对应用了智能SCR软件的非道路国四柴油机进行了完整的台架性能对标,以便验证柴油机的各项性能指标都能满足项目开发任务书的要求,并符合批量投放应用的条件。
3.2 试验结果及分析
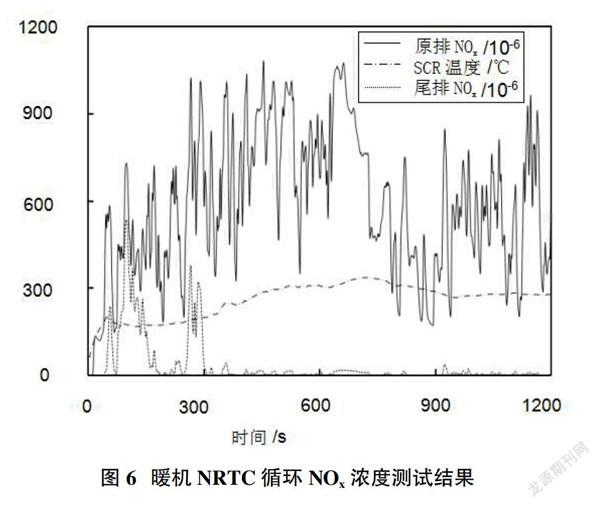
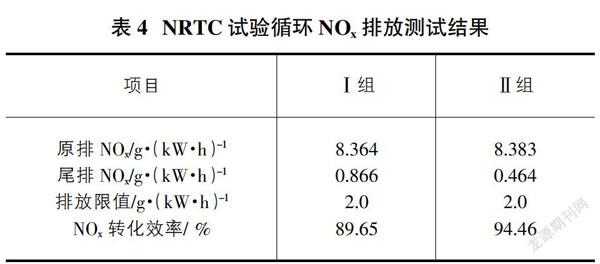
图6显示的是暖机状态下原排NOx浓度曲线、尾排NOx浓度曲线与SCR温度曲线之间的关系,可见在0秒至300秒时,由于SCR温度维持在200℃左右,尿素起喷释放条件受限,从而导致尾排NOx浓度的波动较大。随着SCR温度的升高,尾排NOx浓度维持在了一个较低的水平。如表4所示为其中2组NRTC试验循环下的NOx排放数据,最低的NOx排放值达到了0.464g/(kW·h),对应的NOx转化效率为94.46%,两组试验数据都满足非道路国四法规对NOx排放限值的要求。此外,根据试验结果分析,非道路国四柴油机的各项性能指标也都满足开发需求。
4 结束语
①HIL仿真测试结果表明:采用基于模型开发的设计思想和V模式开发流程搭建的智能SCR系统软件能够通过SCR温度模型、氨存储模型、转化效率模型、前馈控制模型、SCR自适应模型等控制策略精确控制尿素喷射量,并能够满足非道路国四柴油机后处理系统的各项功能需求。
②台架试验结果表明:在NRTC试验循环下,集成式智能SCR软件能够驱动智能尿素泵工作,并有效地控制后处理系统下游NOx的排放,使试验样机的NOx排放值低于非道路国四排放标准。由此可见,开发的智能SCR软件具备了在非道路国四柴油机上批量投放应用的条件。此外,其良好的控制效果也为达标下一阶段的非道路排放限值奠定了基础。
参考文献:
[1]李顶根,朱红雨,成晓北.基于模型的SCR控制系统研究[J].内燃机与动力装置,2015,32(1):26-30.
[2]李兴民.重型柴油机SCR系统满足WHTC循环试验研究[D].大连:大连理工大学,2014.
[3]程开荣,吴恒,程晓章.基于MATLAB柴油机Urea-SCR系统闭环控制策略仿真[J].内燃机与配件,2018,268(16):12-15.
[4]郭雅各.车用柴油机DOC/SCR系统的数值建模及试验研究[D].长沙:湖南大学,2018.
[5]周大伟.基于MATLAB/Simulink的柴油机SCR系统控制软件研究[D].镇江:江苏大学,2017.
[6]李捷辉,胡立,段畅.柴油机SCR系统控制策略研究与软件设计[J].车用发动机,2018,236(3):72-76.
[7]魏学哲,戴海峰,孙泽昌.汽车嵌入式系统开发方法、体系架构和流程[J].同济大学学报(自然科学版),2012,40(7):1064-1070.
[8]李华,杨洋,张佩.基于整车电子电气架构(EEA)的需求工程方法研究[C].中国汽车工程学会.2014中国汽车工程学会年会论文集.北京:机械工业出版社,2014:628-632.
[9]马丽娟.基于软件开发环节中软件架构的作用研究[J].电子测试,2017,371(13):69-70.
[10]吴远盛,陈超,朱帅琦.基于MBD的某型发动机控制软件开发[J].航空兵器,2018,306(4):73-77.
[11]阳长永,王月波,代林.嵌入式软件自动化测试及管理系统[J].计算机测量与控制,2019,27(9):57-60.
[12]中国环境保护部.GB 20891—2014,非道路移动机械用柴油机排放污染物排放限值及测量方法(中国第三、四阶段)[S].北京:环境保护部,2014:48-56.
[13]单昌猛,范强生,刘硕.非道路移动机械排放法规及实施方法[J].内燃机与配件,2019(22):155-156.
————————————
作者简介:黄永鹏(1976-),男,硕士,工程师,主要从事智能控制器软件开发方向的研究。