无人驾驶压路机在路基施工中的应用
2020-09-10周春风王彤
周春风 王彤
摘要:压路机的施工水平是路基质量的重要保障,但是目前压路机施工面临着漏压、欠压、过压等问题,同时压路机强烈的振动环境,对操作人员的身心健康造成极大损坏。基于此,本文结合高精度卫星定位技术、计算技术、传感技术,开发无人驾驶压路机,实现了压路机的无人驾驶精准作业。为路基的无人施工奠定基础。
关键词:路基施工;压路机;无人驾驶;精准作业
中图分类号:U415 文献标识码:A 文章编号:2096-6903(2020)07-0000-00
0前言
國内对工程机械无人驾驶技术的研究起步相对国外较晚,总体发展水平也落后于西方发达国家。国内的研究单位主要有哈尔滨工程大学、国防科技大学、浙江大学、上海交通大学等高等院校和中科院沈阳自动化研究所等科研机构。2002年,国内首次成功研制W102DZ型高性能无人驾驶振动压路机[1]。随后相继开发了“高性能无人驾驶压路机”系统[2],并在此基础之上,讨论了无人驾驶压路机中的串口通信。近年来随着技术的不断积累,无人驾驶压路机已慢慢走向施工现场。
1无人驾驶关键技术
压路机无人驾驶的目标是:在无人干预的情况下,压路机通过预先设定的轨迹路线对地面进行压实,当行驶途中遇到障碍物,根据障碍物相对车辆距离、速度等状态自行判断行为方式,包括继续行驶、降低速度和紧急制动等。实现无人驾驶的关键技术模块包括传感器技术、定位技术、车辆控制技术和计算机控制单元模块。
1.1 车辆控制技术
车辆控制技术是实现自动驾驶的硬件基础,这里的控制技术指车辆通过上层发出的某些数字或者模拟的信号来控制车辆的某些行为,上层通常代表电脑一类的控制单元。车辆控制行为又可分为以下几个模块:
(1)纵向控制:车辆的驱动和制动控制,常见接口有控制车辆的速度、加速度、发动机或者轮端的扭矩;
(2)横向控制:控制车辆的转向,常见接口一般有两种,一种是通过控制方向盘的扭矩对方向盘进行操控,另外一种直接控制方向盘的角度和转速度;
(3)功能性控制:区别于车辆的线控系统(横向控制和纵向控制)之外,功能性控制包括档位控制、转向灯控制、双闪灯控制等,这些控制与线性控制的区别是前者为定量控制、功能性控制为定性控制;
(4)信号反馈模块:在控制系统对车辆作出相关操控指示后,车辆自身需要对这些操作指令作出相应的反馈,帮助开发人员确定车辆是否处于正常工作状态。反馈模块包括但不限于车辆行驶状态提醒,车辆接管提醒,车速、轮速、摆角控制提醒,车门状态、灯光状态提醒,报错提醒等;
(5)通讯接口:目前大部分车辆都是以CAN总线作为通讯接口,个别车辆采用车载以太网作为控制接口。
1.2 传感器模块
传感器是实现自动驾驶硬件系统的必要组成部分之一,车辆本体可以看做自动驾驶的一个最基本的传感器,其提供了车辆的基本信息。对于车辆以外的环境信息则需要通过布置在车身上的传感器进行捕获。常用传感器包括:摄像头、激光雷达、超声波雷达、毫米波雷达以及惯导组合技术。
1.3 计算模块
计算模块也是车辆的决策模块,目前比较成熟的方案是使用工控机,这种方法比较方便,适合自动驾驶初期的算法开发与验证,但是难以实现量产;使用第三方提供的研发平台,例如NVIDIA提供的Drive PX2,但是从经验上看其定制化不足,容易造成资源浪费或者资源不足等问题;自研研发平台,可完全满足自主化定制需求。
2无人驾驶系统总体设计
2.1 系统组成
无人驾驶压路机系统包括传感器模块、电源动力模块、驱动模块、机械执行模块,使压路机在作业过程中实现路径保持功能、自动转向功能、自动避障功能、自动紧急制动功能、自动启停功能等。
2.2 路径规划
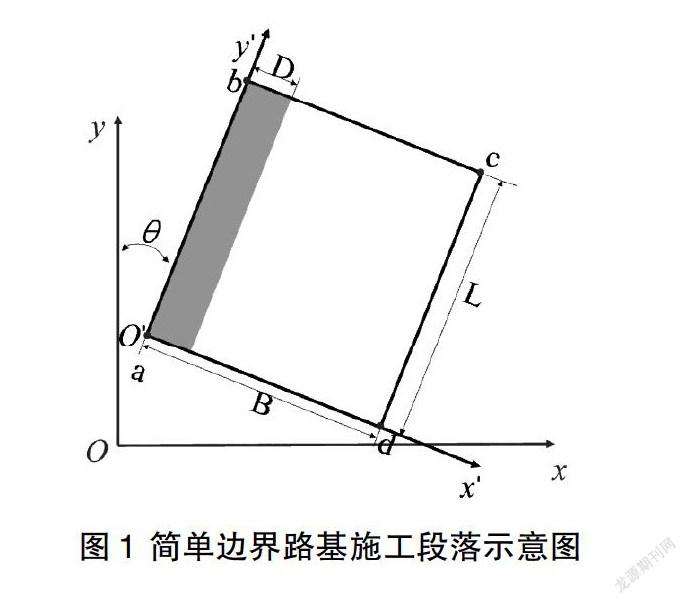
利用边界收缩的方法取得路基施工段落内的最大内接四边形,再对该四边形进行几何法规划,如图1所示,已知作业区域的长为L、宽为B、碾压轨迹宽度为D,将a点设为坐标原点,ab方向为压路机施工初始航向,da为压路机驶入工作区域边界和后退方向施工边界,压路机宽度的一半且da方向上靠近a点处的位置为施工初始位置,记为顶点的坐标O'(x0,y0),bc为前进方向施工边界,cd为驶离施工区域外侧边界,利用编码器获取压路机铰链的转角φ,完成变道转角的计算。根据压实遍数、叠轮要求,实现压路机在abcd所构成区域完成往复式压实作业。
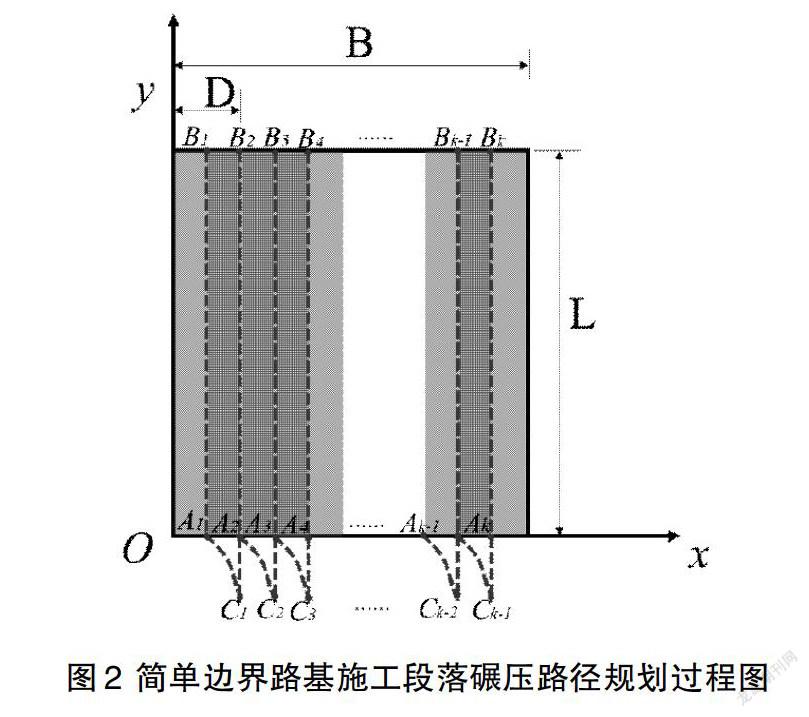
无人驾驶压路机施工路径规划是以施工区域的坐标为基础的,由于路基任意施工段落可作为一个近似的长方形,且以随机的角度处在平面坐标中,如果直接用长方形内的坐标规划路径较为复杂,需要将实际位置的长方形进行坐标转换,即以O'为坐标原点,L边转换为y轴,B边转换为x轴形成标准平面坐标系。即由x'O'y'坐标转换为xOy坐标,如图2所示。由于已知路基施工段落尺寸数据,压路机每道要求叠轮1/2,可以求得在该路基施工段落进行的碾压道数k:
k=|(B-D)/(D⁄2)|
如图2所示,由几何关系可得图中所标各点的坐标:Ak(kD/2,0),Bk(kD/2,L)。即得到了该施工段落区域的关键点信息,碾压路径直线段为(A_1 B_1 ) ⃗,(A_2 B_2 ) ⃗,(A_3 B_3 ) ⃗,…,(A_k B_k ) ⃗。压路机变道路径弧线段为(A_1 C_1 ) ⃗,(A_2 C_2 ) ⃗,(A_3 C_3 ) ⃗,…,(A_(k-1) C_(k-1) ) ⃗。压路机按照(A_1 B_1 ) ⃗→(B_1 A_1 ) ⃗→(A_1 C_1 ) ⃗→(C_1 A_2 ) ⃗→(A_2 B_2 ) ⃗→(B_2 A_2 ) ⃗→(A_2 C_2 ) ⃗→(C_2 A_3 ) ⃗…→(A_(k-1) C_(k-1) ) ⃗→(C_(k-1) A_k ) ⃗→(A_k B_k ) ⃗→(B_k A_k ) ⃗的顺序依次行走即可完成路基施工段落区域的路径全覆盖。
一般情況下,路基施工前需要进行试验段,确定碾压遍数n,且往复一次算为一遍,因此压路机的实际碾压路径为((A_1 B_1 ) ⃗→(B_1 A_1 ) ⃗)×n→(A_1 C_1 ) ⃗→(C_1 A_2 ) ⃗→((A_2 B_2 ) ⃗→(B_2 A_2 ) ⃗)×n→(A_2 C_2 ) ⃗→(C_2 A_3 ) ⃗…→(A_(k-1) C_(k-1) ) ⃗→(C_(k-1) A_k ) ⃗→((A_k B_k ) ⃗→(B_k A_k ) ⃗)×n。在路径规划中每道碾压轨迹都是由起终点坐标控制的,如A1B1就是由A1(D/2,0),B1(D/2,L)控制,由于无人驾驶压路机的行驶轨迹是由GNSS高精度定位技术控制,为了增加行驶轨迹的控制精度,需要在A1B1上加密控制点,使路线中的每一个控制点都对碾压过程产生纠偏信号,进行行驶轨迹的调整,因此本项目在碾压路径中,每间隔1m增加一个控制点,即AkBk生成的控制路径点为(kD/2,0)→(kD/2,1)→(kD/2,2)→(kD/2,3)→…→(kD/2,L-1)→Bk(kD/2,L)。BkAk生成的控制路径点为(kD/2,L)→(kD/2,L-1)→(kD/2,L-2)→…→(kD/2,2)→(kD/2,1)→(kD/2,0)。
3无人驾驶压路机场内试验
3.1 安装定位系统
(1)在场内选择合适位置安装定位基站、要求基站周围无遮挡,基站覆盖范围包括整个测试区域。
(2)车辆安装定位信号收发装置,为保证测试效果,选择安装在车辆顶部。
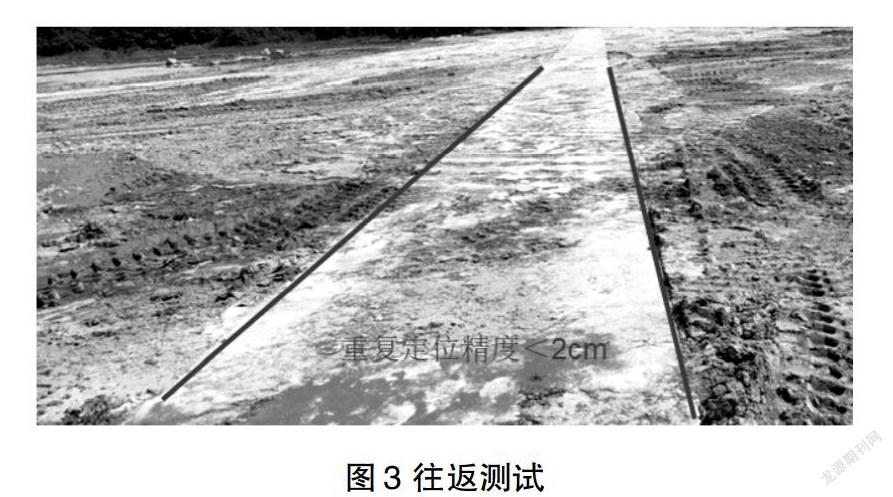
3.2 测试结果
本次测试分为直线测试和往返跑测试两种,测试相关结果如图3所示,其中直线工作过程中,横向偏差不大于1cm,往返测试重复定位精度小于2cm,完全满足施工要求。
4结论
无人驾驶压路机实现了路基碾压施工的速度、碾压遍数、振频、振幅、搭接宽度等施工参数的精确与标准控制,保证施工质量的均匀性,避免了返工,也避免了强烈振动环境对操作人员的伤害,保护了操作人员的健康,具有广阔的应用前景。
参考文献
[1] 陈罗星.W1102DZ型高性能无人驾驶振动压路机[J].工程机械,2017(7):12-13.
[2] 王学宁.基于模糊理论的参数自适应PID智能控制系统[J].农机化研究,2019,41(5):39-44.
收稿日期:2020-06-08
作者简介:周春风(1983—),男,江苏徐州人,本科,工程师,研究方向:新材料、新工艺、智慧工地建设。
Application of Unmanned Road Roller in Roadbed Construction
ZHOU Chunfeng,WANG Tong
(Jiangsu Dongjiao Intelligent Control Technology Group Co., Ltd., Nanjing Jiangsu 210000)
Abstract: The construction level of the road roller is an important guarantee for the quality of the roadbed. However, the current road roller construction is facing problems such as leakage, undervoltage, and overpressure. At the same time, the strong vibration environment of the road roller causes great damage to the physical and mental health of the operators.Based on this, this article combines high-precision satellite positioning technology, computing technology, and sensing technology to develop unmanned road rollers, and realizes the precise operation of unmanned road rollers.Lay the foundation for unmanned construction of roadbed.
Keywords: roadbed construction; road roller; unmanned driving; precision operation
