基于2.4 G无线通讯的绝缘子喷涂清洁设备控制系统
2020-09-10吕刚唐华东陈亮邓文斌王春张瑞亮
吕刚,唐华东,陈亮,邓文斌,王春,张瑞亮
(南方电网超高压输电公司贵阳局,贵阳 550081)
引言
当前,我国电力行业装机规模巨大,根据中电联数据,2019年底我国总装机容量约20亿千瓦[1]。电网运营在输变电过程中需要用到数量庞大的绝缘子用于电气绝缘保护,其中,在高压变电站中通常会用到支柱绝缘子。随着经济的发展,电网容量和输电电压等级相应提高,同时随着工农业的发展,部分地区环境污染日趋严重,在霾、霜、露、毛毛雨等不利气象条件下,污秽绝缘子在较低的电压作用下就可能发生闪络,造成污闪事故,给电力输变电系统安全运行带来严重威胁[2-4]。空气飘浮污染以有机物燃烧后的飘尘含有胶质粘附能力最强,成分复杂容易发生化学反应,形成更深层的粘附。线路和电力设备的清洁需求大,对洁净度的要求高。传统的人工喷涂清洗方式无论从效率或质量,都难以满足当前电力行业日益增加的绝缘子喷涂与清洁防污需求,为了更好地满足电网的运营现状及未来发展,提高并改善喷涂与清洁效果,亟需开发自动化程度高的绝缘子喷涂、清洗设备及其控制系统。
为了设备运行控制的便捷性与适应性,控制系统通常采用无线通讯,市面上应用最广的三种短距无线通讯技术分别为蓝牙、WiFi及Zigbee,其中,Zigbee是基于IEEE802.15.4标准的低功耗局域网协议,其特点是低距离、低复杂度、自组织、低功耗、低数据率、低成本,Zigbee使用频段为2.4 GHz,868 MHz以及915 MHz,在不使用功率放大器的前提下,Zigbee的有效传输范围为10~75 m,该距离可以满足绝缘子喷涂设备的实际使用需求[5, 6]。
本文开发的绝缘子喷涂与清洁机械臂的应用方案中,电气电子控制系统包括无线组网控制、机械臂定位控制及喷涂过程控制。
1 无线组网控制
本控制系统方案使用的无线组网控制采用2.4 G无线通信技术,实现主控制中心对整喷涂系统操作控制,其通讯频段处于2.400~2.483 5 GHz之间,2.4 G 产品应用比较广泛,具有低电压,高效率,低成本,双向数据传输速度高,体积小,快速跳频,前向纠错,校验,传输质量稳定等功能特点,而且工作在全球开放的ISM 频段,免许可证使用。
本文采用的2.4 G全双工无线串口模块功率级别为100 mW,能实现2 000 m距离范围内的全双工高速数据传输,参照绝缘子喷涂设备的实际应用场景,2.4 G全双工无线串口模块完全满足双向数据传输及双向遥控的短距离应用需求。
组网方案使用的是一对多通信,全双工串口式排队访问的通信模式。确定目的地址和源地址,让从机的一端定时发送数据,如果信道忙就随机延时等待,待接收到之后进行校验,返回数据同样包含目的地址和源地址,接收端再进行校验,重新确定通信状态。
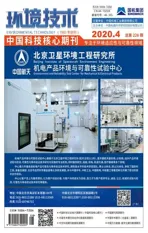
系统无线组网方式如图1所示,通过设定主控制中心为通信主机,平台升降控制模块、物料车控制模块及机械臂控制模块为从机,从机之间是相对孤立的。主机根据设置地址不同的发射地址来实现与各个从机的无干扰通信。从机在未收到主控制中心的通信许可时,处于等待呼唤的状态。本文所选用的2.4 G通信模块具有快速切换/唤醒功能,在切换通信对象,唤醒等待并建立通信状态的时间仅为130 μs。
图2为从机部分的控制系统结构图,系统运作时,主控制中心根据设置地址不同的发射地址,切换与各个模块的通信状态。从机获得主控制中心的指令,根据指令的需求,完成指定的操作,或将状态信息打包发送至主控制中心。
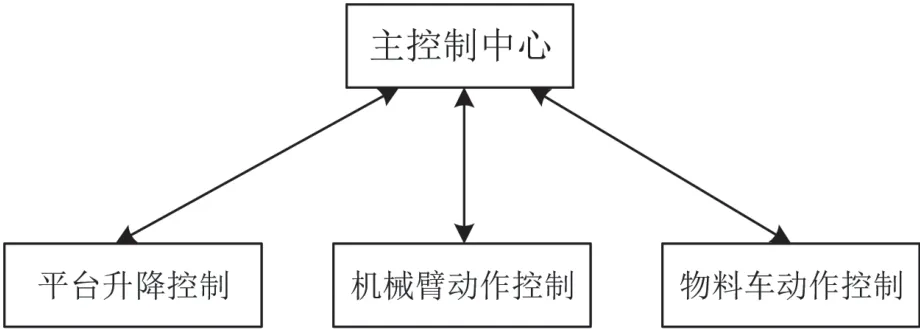
图1 控制系统无线组网方式

图2 从机部分的控制系统结构
2 机械臂定位控制
2.1 升降高度的控制
系统使用的是双桅铝合金升降平台将机械臂提升至工作高度。双桅铝合金升降平台,其上升动作是由叶片泵推动液压油至活塞,从而推动平台上升。下降则是通过泄压阀释放液压油,平台凭自重下降。其上升速度为出厂额定速度8~12 m/min且不可调,而下降速度可以通过调整泄压阀的开度来改变。
实际测试中,由于上升速度达到20 cm/s,速度太快,如果使用继电器控制其上升幅度难以实现均匀喷涂;而下降速度可调为8 cm/s,则较容易实现下降幅度的微调,所以宜使用由上而下的分段喷涂方式完成整段绝缘子的喷涂。
图3为升降控制部分的架构图,升降控制部分的集成控制中心通过采集安装在机械臂下方的高度传感器的数据,控制叶片泵和泄压阀的动作,可把机械臂调整至不同高度。
2.2 机械臂中心空间位置的确定
为了确保整个绝缘子喷涂效果的完整性两侧的一致性,在喷涂操作开始前,必须确定绝缘子顶端位置及绝缘子柱体的圆心线位置。
喷涂工作高度的确定,使涂料能覆盖绝缘子的顶端。喷涂的起止高度,是水平激光测距仪和辅助观测摄像头来共同完成的。在整机初定位时,机械臂处于往后张开的状态,机械臂中心与绝缘子的距离保持在60~120 cm的范围。此时安装在机械臂中心的水平激光测距仪对准绝缘子。机械臂上升时,水平激光测距仪的数据在一定范围内反复波动,当数据突然超出这一范围时,即认为机械臂中心越过了绝缘子的顶端,此时机械臂不再上升,可通过辅助观测摄像头观察机械臂的空间位置和水平激光测距仪光点的位置,进一步确定机械臂中心是否到达绝缘子顶端。控制中心记录此时激光高度传感器的测量信息。

图3 升降控制部分的架构
在喷涂附带操作进行前,必须调整机械臂的位置使机械臂抱合后形成的圆环与绝缘子处于同圆心的状态,避免机械臂在合抱过程中与绝缘子发生碰撞,同时保证两臂上的喷头与绝缘子距离一致,以使两侧的喷涂效果均匀。
在测量得到绝缘子顶端高度数据后,绝缘子的圆心位置有待测定,需要控制机械臂下降以确保后续测量的数据可靠有效。通常,绝缘子的直径为30~60 cm,普通伞裙的高度6~18 cm,伞裙间距为2~15 cm,X轴上传动装置的机械臂左右平移,水平激光测距仪测量机械臂中心与绝缘子表面的距离变化,在60 cm范围内来回平移测得的最小距离,即为机械臂中心与绝缘子的最近距离,此时认为机械臂中心线与即对准了绝缘子的圆心,X轴上喷涂位置确定。
确定X轴的位置后,还需要调整机械臂Y轴上的位置使机械臂合抱形成的圆环与绝缘子圆柱截面处于同心状态。本方案水平方向上使用的是点激光测距仪,优点是光强大,适用于室外环境使用,测量数据处理速度快,灵敏度高;但其缺点也是明显的,只能测出单点距离,无法测量连续曲面的变化。所以在本方案的应用中,要保证喷涂效果的均匀还必须确定伞裙圆柱面位置,通过已知的绝缘子出厂外半径数据R,确定圆心的所在位置。方法如下:X轴的位置确定后,机械臂中心与绝缘子圆心处于同一连线上;此时水平激光测距传感器随机械臂在垂直方向上运动,测得的数据就是绝缘子伞裙与芯棒的高度,取其最小值即为伞裙与机械臂中心的距离S;则圆心与机械臂中心的距离L=R+S。抱合后机械臂的圆心半径为0.6 m,通过Y轴的前后移动,调整伞裙与机械臂中心的距离S,最终使绝缘子外半径R+S=0.6 m,即绝缘子圆柱与机械臂圆心同心。
3 喷涂过程控制
图4为喷涂物料小车的系统结构。
3.1 清洗
清洗系统是由高压水泵、电控阀门、管路及高压喷嘴组成。本方案所使用的是功率为2.4 kW的柱塞式高压水泵,喷刷压力为130 kg,出水量仅为13 L/min,其优点是能产生高压冲击,但耗水量只相当于平时自来水的流量,清洁效果明显。
清洗功能启动后,纯净水经水泵加压沿清洗管路到达机械臂两侧的高压喷嘴;高压喷嘴被驱动电机带动沿环形滑轨运动,重复来回两次冲洗绝缘子表面,即可完成冲洗过程。

图4 喷涂物料小车的系统结构图
3.2 风干
清洗过后残留在绝缘子表面的水渍必须处理干净,否则会影响涂料在绝缘子表面的吸附效果。风干系统是由空压机、电控阀门及空气喷嘴组成,本方案使用的是压缩空气配合多孔式风刀,压缩空气高速从风刀喷出,能将绝缘子表面水珠有效吹落。同时启动散料吸附系统,将风刀刮落的水滴吸收防止再次散落影响吹干效果。
3.3 喷涂
喷涂系统使用高压隔膜泵提供喷涂压力,使用电动阀门控制喷嘴气路的开合,从而控制喷涂的通断。不同的绝缘子的伞裙角度是不同的,且表面不是水平的,因此,正面的喷涂可能存在喷涂面不完整。所以喷涂时需要根据现场绝缘子伞裙角度调整喷涂的角度,以消除喷涂不均匀现象。
图5 喷涂运作的流程图
3.4 散料回收
散料回收使用的是3.4 kW的大吸力工业干湿两用吸尘器。由于喷涂溶剂使用的是挥发性的有机物,所以在散料回收桶内增加了活性碳吸附网处理回收得到的喷涂散料。散料回收系统的另一作用是在清洗过程中,高压水泵喷刷绝缘子表面同时,启动散料回收系统,可以控制清洗时高压水的溅落范围。
图5为喷涂运作的流程图。机械臂抱合后,机械臂上升至绝缘子顶端,喷涂操作正式开始。高压清洗喷头、风干空气喷嘴和高压喷涂喷嘴同时装在运动电机驱动的喷涂架上,随运动电机的转动,沿环形滑轨绕绝缘子做圆周运动。
高压清洁水泵启动,两侧运动电机带动清洁喷头沿环形滑轨运动,双侧喷刷绝缘子表面,运动电机沿环形滑轨不停来回滑动,配合升降平台的缓慢下降完成整根绝缘子表面的清洁。
清洗完成后,机械臂回到喷涂起始高度。吹干系统的电控阀门开启,压缩空气从风刀式空气喷头喷出。此时散料回收吸附系统一同启动,用于吸附散落的水雾。空气喷头随驱动动机往复一个来回,完成该高度的风干。
喷涂前,使用辅助观测摄像头观察绝缘子伞裙的角度,用航模舵机驱动喷头调整喷头角度。角度调整完成后,启动喷涂隔膜泵开始喷涂。喷涂喷头通过气动活塞控制喷涂的开合。
在一高度位置喷涂完成后,使用辅助观测摄像头观察,喷涂效果、喷涂厚度和均匀性是着重考察的因素。绝缘子表面喷涂效果中,其厚薄程度是通过调整运动驱动电机的运转速度控制喷头在某一位置的停留时间来决定的。通过辅助观测摄像头观察判断厚度情况是过薄还是过厚,应调整运动驱动电机运转速度,若喷涂过薄则需重新喷涂;如有漏喷现象,则有可能是涂料雾化不均匀或机械抖动引起的,应及时补喷。确定喷涂效果完好后,升降平台下降18 cm,机械臂重复吹干的动作,然后开始下一高度的喷涂,如此地重复,直到完成整根绝缘子的喷涂工作。
4 总结与展望
本文利用2.4 G无线通讯短距离通讯技术的优势,开发一种绝缘子喷涂机械臂的应用方案,其中电气电子控制系统包括无线组网控制、机械臂定位控制及喷涂过程控制,主控制中心负责集中控制平台升降、机械臂动作及物料车动作。本套设备系统包括清洗、风干、喷涂、散料回收的全过程精确控制,相比传统人工喷涂清洁方式,操作简便并且能够有效地改善喷涂与清洁效果,更好地满足电网的安全、可靠运营,同时提高绝缘子喷涂清洁运行维护效率,在电力系统中具有非常巨大的应用潜力与市场前景。