双轴精密离心机反转台精密姿态调节机构的设计与分析
2020-09-09赵世鹏
吕 磊,赵世鹏,舒 杨
(中国工程物理研究院总体工程研究所,绵阳621900)
0 引言
高精度的精密离心机主要用于对惯性设备的标定,例如加速度计、陀螺等仪器仪表[1]。国内对线加速度计的校准主要是静态校准,例如离心试验、重力场试验等;动态校准主要是以线振动台为主进行的校准[2-3]。然而随着技术的发展,我国精密离心机正朝着更精确的加速度不确定度水平、大负载、多轴、温度试验等方向发展,测试对象也从单一的加速度计扩展到惯性平台及捷联惯组[4]。因此,国内相关单位逐步开展了双轴精密离心机的研发工作,以期填补相关技术空白。
杨亚飞[5]研究认为,被测试加速度计在离心机上的安装姿态误差和精密离心机主轴姿态误差是影响加速度计测试和标定准确度的重要因素。任顺清等[6]则研究了精密离心机主轴回转误差中以此谐波对离心机瞬时工作半径的影响。王洪波等[7]则对单轴精密离心机结构误差对其运动精度所造成的影响开展了深入分析,并指出主轴回转系统半径误差、倾角误差随主轴铅垂度误差的增加而线性增加。综合上述研究及相关资料,双轴精密离心机中,工作在离心场中的从轴(或称为反转台)其自身运动轴线的铅垂度是整机实现较高加速度不确定度的重要环节。对双轴精密离心机,国外公开发表的研究较少且相关内容的叙述模糊不清[8-9],而国内的相关研究则主要集中在反转平台的动态平衡[10-12]等问题上,缺乏相关姿态调节功能,暂未在公开发表资料中见到相关研究内容。
因此,本文针对臂式双轴精密离心机的从轴反转台在静态下的轴线铅垂度精密姿态调节开展研究,对双轴精密离心机所采用的精密姿态调节机构开展了设计与分析,创新地提出了一种具备可多方向精密调节的铅垂度姿态调节机构,并对其精度、受力、变形等方面进行了计算分析与讨论。
1 双轴精密离心机反转台精密姿态调节的功能需求
1.1 双轴精密离心机工作原理
双轴精密离心机的构成如图1所示。在离心机主机中心,具有一套安装在地面的精密旋转主轴,支承离心机转臂/转盘及其上的附属机构。在转臂/转盘末端,安装有一套精密、平行于中心主轴的从轴。随主轴旋转时,从轴在转臂上同时旋转,因其旋转方向通常与轴承方向相反,故从轴转台也称作反转台。当反转台转速大小与主轴相同、方向相反时,可为反转台上安装的被测试件提供 “0”梯度的加速度场。

图1 双轴精密离心机反转台示意图Fig.1 Schematic diagram of the counter-rotating table in double axis precision centrifuge
1.2 双轴精密离心机反转台功能需求与分析
双轴精密离心机的反转台工作在高g值(g为标准重力加速度)离心场下,为实现反转台旋转轴线与离心机地面主轴的平行度要求,以达到足够高的离心场梯度精度,必须实现反转台整体在铅垂方向上具备调节精度达到铅垂度±10′范围以内,从而在由于某些因素导致从轴与主轴平行度较差时,可以实现从轴铅垂度的调节,恢复主轴、从轴之间的平行度关系。同时,由于反转台需要搭载20kg质量的试件,抵抗50g的离心场作用,该姿态调节机构还需满足足够的受力与变形要求。
结合图1所示,离心机转臂末端为反转台系统,反转台内部由轴承、内框、外框以及两套姿态调节机构组成。分析可知,为保证反转台系统可实现姿态调节,应使得反转台系统整体相对转臂是 “浮动”的,并且可在非锁紧状态下实现对反转台轴线的微动调节。在锁紧状态下,可承载反转台在50g离心场作用下的受力。从空间上讲,主轴与从轴需满足空间平行度要求,故反转台应实现空间姿态的调节。姿态调节机构中的固定件与转臂固定连接,运动件与反转台的外框固定连接,从而保证反转台整体随外框在调节机构的限定范围内进行绕x轴和y轴方位上角度的微小精密调整,实现铅垂度±10′(俯仰角、偏摆角)的要求。
初步分析,反转台姿态铅垂度±10′可通过合理设计具有空间3个方向旋转自由度的机构实现,避免在±10′结构件之间发生干涉即可。从受力上看,估算反转台整体质量约1t,在50g离心场下对姿态调节机构形成约50000N的作用力,方向沿离心场方向,合理选择材料、设计,保证结构件足够强度,即可满足所需的受力条件。因此,初步分析认为,所涉及的指标要求是可实现的。
2 姿态调节机构的设计
2.1 球面调整定位
为实现反转台框体整体角度在图1所示的x和y方向上同时调节,设计的姿态调节机构主要由精密配合的球运动副(凸、凹球面)组成。相比万向节,相互配合的球面之间在保证充分润滑的前提下,具有更高的角度调整灵敏度、更小的摩擦力,可实现角度的精密、微力、微量调节。另一方面,由于本文中的反转台工作在高g值的离心场下,在工作中将受到离心场作用,沿离心场方向受力显著放大。而采用球面配合,增大了受力接触面积,提高了姿态调节机构的承载能力,避免了受力后的大变形对精度的影响,如图2所示。

设计中,采用了左右对称各布置一套配合球面的方案。理想地,在调整过程中,以反转台内框架几何中心位置为调整中心,则要求两套配合球面的球心均为该中心,以实现两个球面的同时、配合移动。结合反转台安装等其他方面的要求,设计球运动副直径为2000mm,球心位于框体中心。因此,由于球心与框体中心重合,理论上反转台框体可实现保持中心位置不发生各方向位移的前提下进行球坐标系下的角度调节。
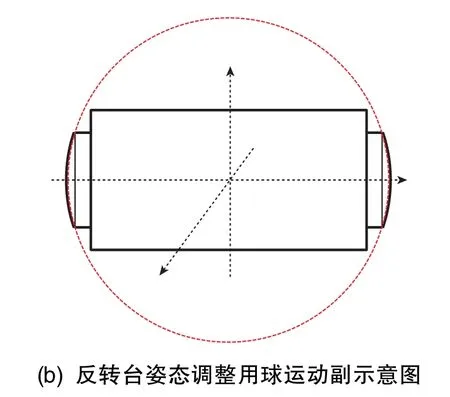
图2 反转台姿态调整用球运动副机构三维模型及其示意图Fig.2 3D model of counter-rotating table and schematic diagram of the attitude adjusting sphere joint
如图3所示,反转台框体与凸球面固定连接,且凸球面上有一根较长的调整杆沿球面法向向外延伸。凹球面与转臂固定连接(转臂未在图中示出),凹球面中心有孔,凸球面调整杆从其中穿过。安装完成后,左右2套配合球面均密切贴合。工作时,通过对调整杆在各个不同的方向上施加作用,使反转台框体在球面定位下进行旋转姿态的调节。

图3 两组球运动副组成的角度姿态调节能力示意图Fig.3 Schematic diagram of the attitude adjusting sphere joint
事实上,为保证±10′的角度调节行程要求,结合球面直径2000mm,只需保证接触球面中固定凹球面的中心角比凸球面的中心角大±10′即可。但是,为保证球副之间有足够的接触面积,应增大凹球面面积和体积以适当提高强度、减小变形和应力集中,故本方案中采用凹球面的中心角比凸球面的中心角大±1°的设计。
2.2 万向节精密螺杆
凸球面延伸穿过凹球面中心孔直至外部的调整杆是用于对反转台框体施加作用,使其在球面内发生相对旋转运动的作用点。如图4所示,万向节精密螺杆组件包含:精密螺杆、锁紧螺母、万向节以及从凸球面延伸出来的调整杆。
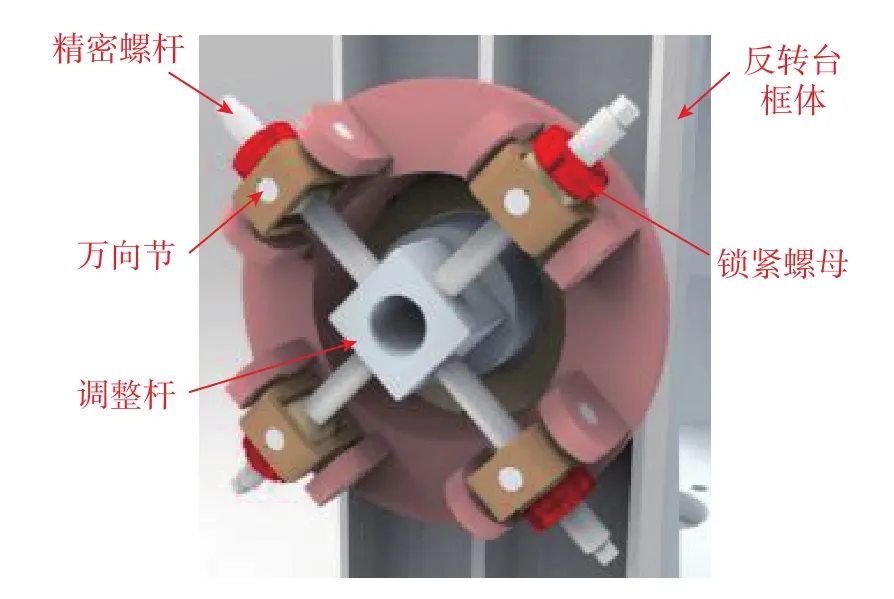
图4 姿态调节精密螺杆组件示意图Fig.4 Schematic diagram of the attitude adjusting precise screw bar components
如图4所示,本文研究中,调整杆截面设计为正方形,直角边与铅垂线成45°夹角。精密螺杆头端面成规则平面,理想情况下与调整杆的四方平面实现完全的面接触。4组精密调节的螺杆沿调整杆周向4个平面均匀布置,也与铅垂线成45°夹角,互相之间成90°夹角。精密螺杆与万向节通过螺纹连接,螺杆可沿万向节内的螺纹方向旋转伸缩移动。精密螺杆头端的平面与调整杆的四方平面完全面接触,且可以产生平面内的相对移动,螺杆与调整杆之间的作用力沿接触平面的法向方向。
反转台调整其O-xz平面内(即绕y轴)铅垂度如图5所示,调整杆初始位置为图5中的黑色实线。调整过程为:首先将4组精密螺杆旋松,调整杆在O-xz平面内旋转(即绕y轴旋转),调整至合适角度后,将4组精密螺杆依次旋紧,使得螺杆头端平面与调整杆四方平面完全接触,且相互之间不再发生相对运动,调整后的位置为图5中的黑色虚线。由于螺杆安装在万向节上,螺杆随调整杆角度变化而变化的同时保持良好接触和受力,即螺杆可始终与调整杆的相应接触面保持垂直,但此时螺杆与调整杆的接触位置产生了微小平移。
反转台框体在O-yz平面内角度调整的简化模型示意图如图6所示,初始位置时的反转台框体、螺杆位置为图6中的实线。松开所有精密螺杆与调整杆的接触,通过精密螺杆调整反转台框体在球运动副内的相对位置,达到所需的角度值θ,依照一定次序旋紧所有精密螺杆。由于万向节的作用,可以保证在调整过程中精密螺杆的头端平面与调整杆的四方平面始终保持良好的平面接触,但仍可在接触面内产生相对滑移。
基于两组同直径、共球心的配合球面接触作用,可以较大程度地保持反转台框体作为一个整体在球运动副内进行全向的旋转运动,进行相对角度关系和姿态的调节。两套共8组精密螺杆配合万向节,实现多方向角度变化下螺杆对调整杆的有效接触与支承。
为实现球面接触良好的相对运动,在凹球面(相对转臂固定的球面)上开设有气体静压节流小孔,在运动时可采用对凹球面供给具有一定压力的洁净气体,在配合球面上形成气体静压轴承原理的气膜,实现配合球面的低摩擦球面运动,从而提高反转台框体对运动响应的灵敏度,实现螺杆驱动下的全向角度精密调整。
精密配合的球面是实现反转台旋转的核心,而精密螺杆的调节能力是反转台姿态精度调节的核心问题。已知本方案中的球面半径为SR=1000mm,当一套(共4组)精密螺杆在O-xz平面内成垂直布置,假定实际工程中,操作螺杆完整地旋转一圈是操作调整过程中较为容易实现的,工程中实际可控的精密调节步长为δ,即精密螺杆螺距为δ。已知球面半径,当螺距取值δ=1.5mm时,有

实际工程中,操作控制精密螺杆每次旋转半圈,则螺杆可有效准确控制旋转半圈(180°),则螺杆调整精度约为2.578′,即当旋转精密螺杆半圈时,台面铅垂度可产生2.578′的角度变化。通过一系列逐步精密调整,可实现铅垂度10′以内的精度要求。
3 姿态调节机构的受力分析与讨论
机构调节的目的最终都是把反转台调节到了铅垂度要求较高(±10′)的范围内,实际上对机构的受力分析只需要校核最大误差情况下的受力就可以了,其余条件下的受力必然满足要求。
3.1 球运动副组件受力的有限元分析
球运动副组件采用38CrMoAlA轴承钢,材料具有较好的刚性、强度和稳定性,在调质和表面渗氮后具有良好的表面耐磨性。由于反转台外框承载整个反转台轴承、台面、被测试件等部组件,而姿态调节机构承担调整个反转台外框并实现其精密调节姿态。因此,总质量为1t的反转台在50g离心场作用下产生的作用力将全部作用在转臂远端的一对球运动副上,如图7所示。

图7 球运动副的配合球面组件示意图Fig.7 Schematic diagram of the sphere joint components
球运动副设计直径为2m,假设最差情况下(即最大角度调整时),凸球面与凹球面之间将达到最大的角度差(即10′),如图8所示。此时,理论上讲,凹球面上的受力是不均匀的,且受力面不再对称,但是受力面积未发生变化,这可理解为作用在凹球面上的作用力在法向方向发生了一点变化,即产生了一个分量

Fx仅为总受力F的0.29%,故在球运动副组件的受力有限元分析中,可以不考虑角度偏差对球运动副受力造成的影响,按照作用力为垂直的法向方向进行分析即可。

图9为球运动副受力的有限元计算结果。图9(a)中,最大应力发生在凹球面内圆孔倒角处,应力值为50.73MPa。图9(b)中,最大变形发生在凸球面组件的安装面(即受力面)上,变形量约为6.24μm,由于变形量非常小,故变形对姿态精度等的影响可以忽略不计。
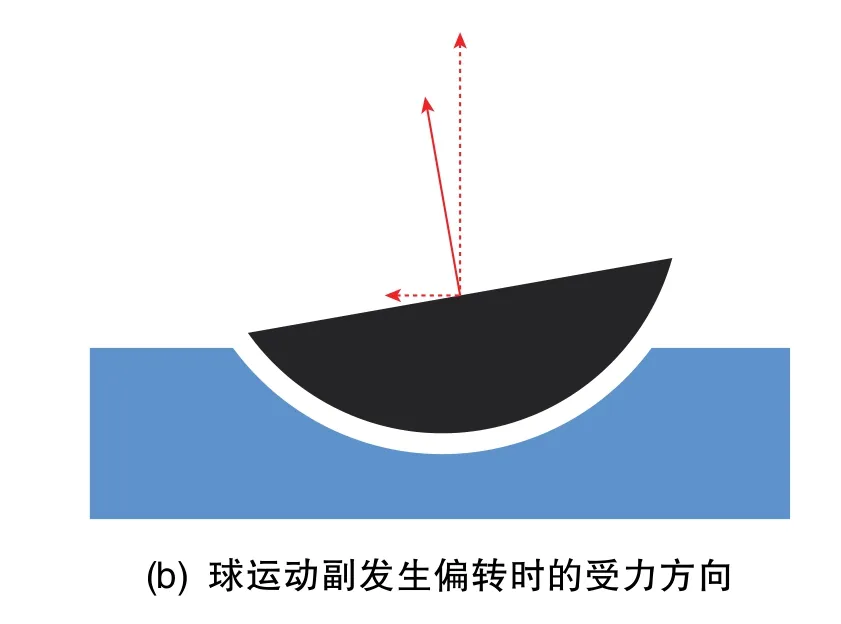
图8 球运动副受力方向示意图Fig.8 Schematic diagram of the sphere joint in the forced direction

图9 球运动副受力有限元分析Fig.9 FEM analysis of the sphere joint
3.2 精密螺杆的受力计算分析
理想情况(即反转台姿态误差为0,无需进行任何调整)下,在正常运行过程中,反转台外框体与转臂方向一致,如图10所示。假设凹球面与凸球面严密、良好配合,则反转台在重力方向和离心场方向上的绝大部分受力都是由球运动副来承担的,包括反转台的重力和离心场作用力。此时,反转台调姿用精密螺杆是不受力的,仅在离心机启动、转速变化、停止的过程中,精密螺杆需向反转台框体提供作用力,使反转台随转臂整体运动。

图10 最大误差θ=10′时的调节机构受力分析示意图Fig.10 Schematic diagram of load analysis with maximum error θ=10′
如图10所示,理想情况下,反转台外框与水平方向的夹角为0°(图10中右侧的黑色实线框),此时反转台铅垂度为理想的0°。假设反转台经过调整后,铅垂度刚好调节至θ=10′的情况(符合要求的最差情况,图10中右侧的红色实线框),此时反转台外框与水平方向的夹角为θ=10′, 由于离心场对反转台左右两部分的作用力不再共线,而是与水平线形成偏移距离h,由于反转台框体尺寸较大(约2m),其离心场梯度不可忽略。根据受力分析,容易得到:F1<F2、M1<M2, 因为球运动副无法产生相应的平衡力矩,所以需要由精密螺杆提供。
已知反转台中心点o与主轴的距离为6m,该位置处的离心场为50g,反转台半径为0.65m,则得到反转台的离心场近点a和远点b所处位置的离心场分别为41.67g和58.33g。忽略反转台调整角度误差(θ=10′)对离心场梯度的影响,反转台的离心场近点a′和远点b′的离心场仍为 41.67g和58.33g。假设反转台左右两部分的集中质量均为1t,则有
则精密螺杆需提供的作用力Ft为

由计算结果可知,此时的精密螺杆受力较小。考虑最坏的情况,即只有最外侧的调节机构受力,而该单侧的调节机构全部作用力又都集中在其中1根精密螺杆上,此时调节机构在Ft作用下的变形云图如图11所示。

图11 精密螺杆有限元分析云图Fig.11 FEM analysis of the precise screw bar
此时,带万向节的精密螺杆变形最大约为0.47μm,最大应力为1.1561MPa。因此,本设计中姿态调节的精密螺杆受力良好,工程上易于实现。
4 结论
本文探讨了利用两组同直径的球运动副进而实现反转台在空间上多个角度的运动调节能力,再利用带有万向节的4组精密螺杆,配合反转台在球运动副内的微小角度调节,从而实现双轴精密离心机所需的反转台铅垂度精度。
经过受力分析可知,反转台在离心场方向和重力场方向上的受力主要由配合球运动副承受。当反转台铅垂度调节至最大允许误差(10′)时,由于离心场作用而形成的力矩由精密螺杆来平衡。经过受力分析,可知该工况下精密螺杆受力较小,状况良好。综上所述,本文所分析的姿态调节机构可以满足双轴精密离心机的反转台姿态精密调节的设计要求。
文中没有对球运动副的受力开展分析。实际上,由于在离心机的设计中,球运动副的设计没有受到尺寸以及重量方面的严格限制,故在合理选择球运动副的材料,完成结构形式以及尺寸等重要参数的合理设计和优化之后,可以实现球运动副在变形和应力集中方面的良好设计结果。