水下机器人及三维声呐技术在水闸安全鉴定中的应用研究
2020-09-07许可安徽省建筑工程质量监督检测站
许可 安徽省建筑工程质量监督检测站
在水利工程中,水闸作为挡水、泄水或取水的建筑物应用广泛。我国是水利大国,所建成的水闸数量全球最多,根据国家2010-2012年第一次全国水利普查的结果,过闸流量1立方米每秒及以上水闸268476座,橡胶坝2685座。其中规模以上(过闸流量≥5立方米每秒)水闸97019座。由于人类活动和环境荷载的影响以及日常管理缺失等原因,我国许多水闸,特别是上世纪90年代前建设的部分水闸,存在严重的安全隐患。
水闸安全鉴定作为水闸排险加固工作的基础和重要环节,是水闸运维管理不可或缺的部分。现场检测结果是水闸安全鉴定的重要依据和复核计算基础,同时也直接关系到水闸安全等级的最终评价。水闸现场安全检测分水上部分和水下部分,水上部分检测技术已相对成熟,但水下部分检测还主要依靠潜水员水下探摸或围堰排水后检测,检测效率、检测质量均不甚理想。
水下机器人技术作为近年快速发展的应用技术,可作为水下检测平台搭载相应的水下检测仪器设备高效快速的完成水下结构检测工作;水下三维声呐技术,利用水下三维扫描成像技术,获取水下结构外观轮廓的精细点云数据,为水下结构测量及外观质量判断提供数据依据。水下机器人和三维声呐技术的综合应用可为水闸安全鉴定现场检测提供高效、高质量的水下检测成果。
1.水闸安全鉴定
为加强水闸安全管理,规范水闸安全鉴定工作,保障水闸安全运行,水利部2008年印发了《水闸安全鉴定管理办法》(水建管〔2008〕214号)。根据管理办法的要求,水闸实行定期安全鉴定制度。首次安全鉴定应在竣工验收后5年内进行,以后应每隔10年进行一次全面安全鉴定。如遇特殊运行情况,如超标洪水、强烈地震等,应及时进行安全检查。
现场安全检测针对水下部分,重点检测水下部位有无淤积、接缝破损、结构断裂、混凝土腐蚀、地基土或回填土流失、冲坑和塌陷等异常现象。水下工程检测目前主要依靠潜水员潜入水下采用探摸、观察及树下照相等技术对水下结构物进行检测。但潜水员检测对检测深度、检测工作时间,检测水下环境有较多限制,对潜水员有一定的人身安全风险,同时对潜水员个人经验依赖程度高。因为潜水员检测需要潜水员一点点探摸,主要集中在局部进行检测观察,无法对水下结构进形成整体的探查结果。
2.水下机器人系统
AUTO200ER水下机器人系统(ROV)是一款结构紧凑、易维护、可靠稳定的定制化水下机器人系统,具有推力大、功能齐全等特点。该系统主要包括水下机器人水下主体、地面控制系统两部分;其中,水下主体标准配置深度计、姿态传感器、高清水下摄像头、水下照明、推进器等部件,采用框架结构,结实可靠,本体示意图如图1;地面控制系统包括控制系统、电源控制单元等部件。该系统最大耐压深度为200米,采用模块化设计,可以方便快捷地对各种功能模块和单元进行配置和更换,并支持多种外置传感器设备;其推进及控制系统采用网络通讯结构,操作简单方便,拥有多个微处理器,可有效提高系统性能。
AUTO200ER 水下机器人系统(ROV)可广泛应用于水利水电,水务等水下结构和设施的观察和检测,搜救,水环境和水下生物的观测、研究及教学,海洋科研,水下娱乐,水下考古,深水网箱渔业养殖,人工渔礁调查等。
3.水下三维声呐系统
水下三维声呐系统利用水下声学测距原理扫描水下目标结构物,水下声纳以一 定频率发射声波波束,波束经过障碍物反射,声纳头接收声波反射信号,将其转化为电信号并传输至声纳控制单元,声纳控制单元利用声纳的操作软件把声纳头扫描到的信息以点云形式存储并显示。
BV5000三维声呐系统是美国Teledye公司开发的一款水下扫描探测三维声呐系统,如图2。该系统可生成高分辨率、360度全景的三维点云数据,可精确获取水下结构、物体等测量数据,并可以提供工程和测量图像。
4.水下检测技术方案
在水下机器人系统实施检测前对待测区域环境、水流条件、下水能见度进行先期调查、勘察,以配置和调整检测设备,使检测达到良好效果。
4.1 水流条件
水下机器人系统具备一定抗流能力,当水流速度过大,ROV操控将非常困难,易出现ROV无法保持水下位置,偏航迷航等问题,严重时可能会导致设备与闸室内结构发生碰撞,对闸室内结构和设备造成损害。
4.2 能见度条件
在水下能见度较高时,可以选择高清摄像头作为水下检测设备进行检测。当水下能见度低时,建议先进行水下声呐普查,通过声呐普查确定水下结构异常或疑似存在异常区域,再利用摄像头对异常区域进行详查,能见度差时水下机器人在进行检测时应尽可能贴近目标,确认异常的形态、尺寸和发育走向等。
检测工作首先利用水下三维声呐系统对水闸水下结构进行全覆盖三维扫描,通过点云成图模式,将水下结构物外观形态展现出来。通过对三维声呐系统扫描成果分析,查明水闸水下结构及周边结构是否存在异常。根据分析结果,利用水下机器人对结构异常或疑似存在异常区域进行局部详查。同时,对水闸水下结构关键部位进行近距离观察,获取状态特征。
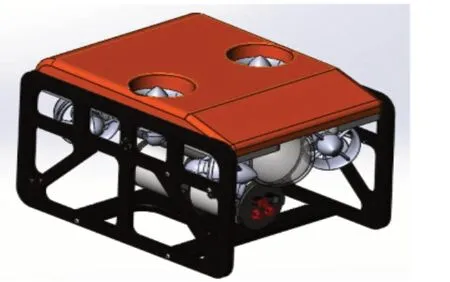
图1 水下机器人系统本体示意图

图2 BV5000三维声呐系统
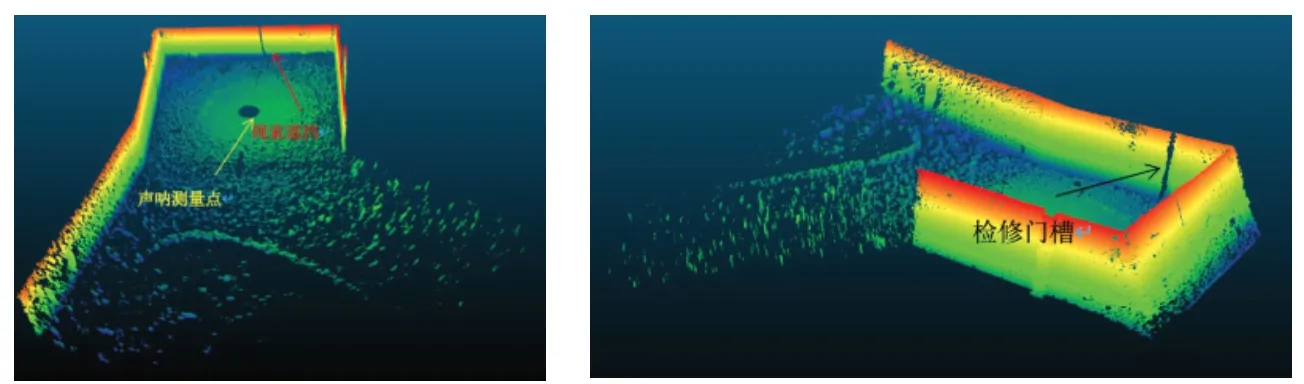
图3 闸室三维点云模型图
5.水下检测技术工程应用
某节制闸位于某运河泄水出口处,最大泄洪量4,600立方米/秒;最大蓄水库容量7.78亿立方米,该节制闸共31孔闸,单孔净宽12m,配弧形钢闸门。闸室为开敞式倒Π形结构,闸墩、底板均为钢筋混凝土结构。为保障节制闸安全运营及水闸管理需要,水闸管理部门组织对该节制闸进行安全鉴定评价,现场安全检测水下部分,采用水下机器人和三维声呐技术来进行水下检测。检测之前,所有闸门需全部关闭,水下环境为无水流,处于静水状态,首先对单个闸室进行三维扫描声呐扫描,根据闸门宽度及向下游延伸长度,每个闸室设置一个测站,过程中利用换能器对水下结构进行扫描,最终通过点云成图的模式将水下结构内壁的形态展现,如图3。
6.结语
水下机器人和三维声呐技术的综合应用可以有效完成水闸安全鉴定中的水下检测工程,可以提供水闸水下结构整体数据,还可以根据检测需要来完成关键部位的局部详查,为水闸安全鉴定提供详细数据。随着技术的发展,利用水下机器人作业平台可以搭载更多水下检测仪器,为水闸及其他水下设施检测提供更准确、更高效的检测成果。
