汽车网络拓扑设计
2020-09-06张晶
张晶

摘 要:本文主要介绍了汽车网络拓扑的设计原则,及对各个拓扑优缺点进行了介绍及总结,对从事汽车网络拓扑设计人员具有一定参考意义。
关键词:汽车 网络拓扑 原则 设计
1 引言
随着汽车电子技术的发展,越来越多的智能控制系统应用于汽车,现在应用较成熟的通信技术是CAN总线技术,即所有模块遵循统一CAN通讯规范实现互相之间的通讯,较高配置的汽车会配有上百个模块,如何将这些模块合理的布局在CAN总线上,实现较高的通讯效率,此文着重对如何布置出合理的CAN网络拓扑给出一定的建议。
2 CAN网络拓扑的布局形式
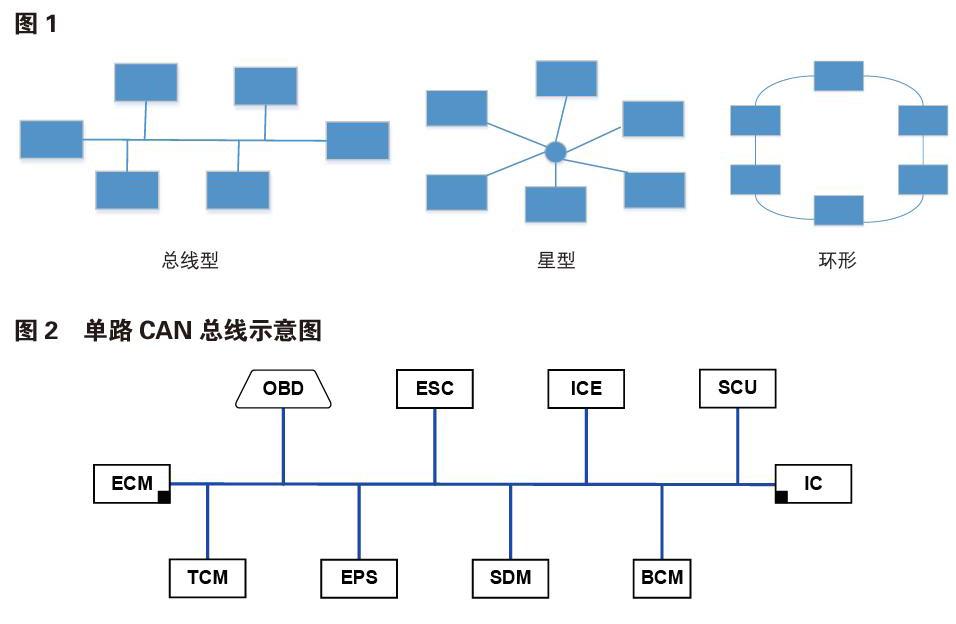
网络拓扑的设计对于汽车通信系统来说显得十分重要,它直接关系到汽车通信系统的稳定性、可扩展性等,进而关系到整车的质量、安全与开发成本等。目前主要有以下几种网络拓扑:总线型、星型、环形,见图1。
2.1 总线型
总线型网络拓扑是在汽车拓扑布局中最常见的一种,采用总分结构。
在CAN通讯模块数量较少且网络负载率在设计阈值范围内,通常采用单路CAN总线拓扑结构,即一条CAN双绞线主干线,各分支线分别与CAN主干线连接。布局如图2。通常在线束最远端的两个模块内部设计有终端电阻,终端阻值在120±3Ω,信号在传输介质上传输,如果其所感受的传输介质的瞬态阻抗一致,则信号将保持原来的形状传输下去,但假如在任何一处所受到的瞬态阻抗发生变化,信号在该处会形成信号反射,一部分信号被反射回去,而另一部分继续传播,但信号已经发生失真,终端电阻的目的是降低信号反射造成的信号传输失真问题,当终端电阻阻值超过一定范围后也会造成信号传输的失真。节点的支线长度一般要求1米以内。负载率一般要求(30±5%)比较合理,总线负载率过高会令各节点忙于应付总线消息的收发,导致ECU执行效率降低,而负载率过高则没有充分利用网络带宽,浪费资源。
网络负载的计算:总线上实际数据传输速率比上理论最大数据传输速率。
最大数据传输率:例如速率为500kb/s 高速CAN总线的最大数据传输速率为每秒可以传输500,000Bit的串行数据。实际数据传输率:假设现在总线中只有一帧数据长度为8字节周期为20ms的报文,周期20ms表示一秒内有50次该报文被发送。则根据CAN 2.0标准定义,CAN标准帧的长度为111Bit(未考虑连续隐形电平时自动插入一高电平位)。
计算公式=实际数据传输率/最大数据传输率=111bit* 50次/500,000bit=1.11%。当然总线的负载也可通过一些仿真软件进行模拟分析,如CANoe,更加方便快捷。
当CAN通讯模块数量较多且总线负载超过设计阈值,需要设计多路CAN总线。各路CAN总线之间需要交互的信号通过网关路由进行转发,同时网关路由可以过滤掉不符合规则的网络ID报文,减少网络不合理的负载,多路CAN总线如图3所示。
多路CAN总线设计需要统筹规划,如何分配各个模块所在的CAN总线有以下原则:
1)信号交互较多的模块放置在同一路CAN,这样可以提高模块响应速度,利于模块短时间做出响应。例如车身稳定控制模块ESC、电动助力转向模块EPS、智能驾驶控制模块RSM与ESC和EPS 交互非常频繁,在开启紧急制动、车道保持等功能时需要实时控制制动和转向,且ESC和EPS要实时反馈执行的情况,故将这三个模块放置在一路CAN网络,三者之间的交互不需要通过网关转发,提高了信息实时处理效率。
2)具有远程通讯的模块单独放置一路CAN,因为具有远程通讯的模块会更容易受到外部攻击,故单独放置在一路CAN,且网关路由在中间可以起到防火墙隔离作用。例如本拓扑将远程通讯模块T-ICE放置在单独的一路CAN网络上。
3)各个CAN总线的终端电阻布局在各路CAN总线距离网关最远端模块内部,模块集成电阻120Ω,同时除诊断接口每路CAN网关端口设计120Ω电阻,CAN网关诊断端口电阻为60Ω。如果模块内部不集成终端电阻,也可将终端电阻设计在每路CAN双绞线上距离网关最远端处。
4)与两路CAN都有频繁信号交互的模块可以横跨在两路CAN上,例如混合动力汽车控制器HCU可以横跨在动力CAN与新能源CAN,信息处理实时性更高,同时接入两路CAN的模块需要有两路CAN接口,同理如果与3路或N路CAN都有频繁交互的模块可以同时跨越几路CAN,现实中同时接入3路CAN的模块较少。
总线型拓扑的優点:
1)总线型结构所需要的电缆长度小;
2)总线型结构简单。
总线型拓扑的缺点:
1)支线与干线连接处需要将线束外皮拨开再进行焊接融合,工艺复杂,且报废率较高;
2)支线长度限制严格,不利于线束布置,拓展性较差,且存在支线反射;
3)总的线束长度有要求,不大于40米。
2.2 星型
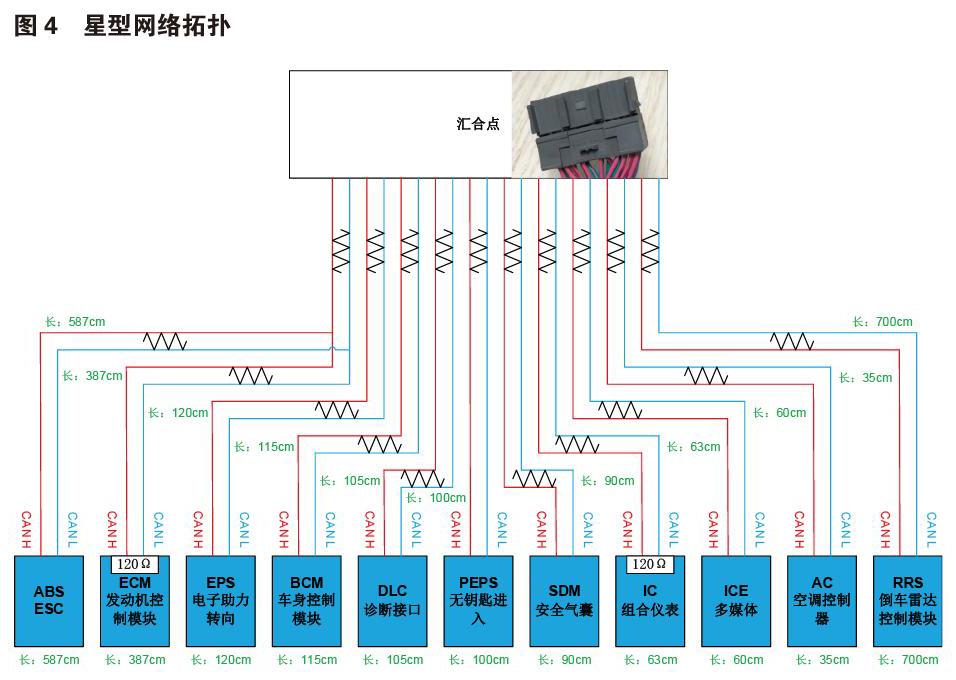
星型网络拓扑也越来越多的应用于汽车网络拓扑中,即所有模块最终汇集于一点,再通过集线器接在一起,所有模块之间的通讯都需要经过中心点,如图4如所示是一款汽车的星型网络拓扑。
在星型网络拓扑中,每个模块通过点对点连接到中央点,任何两站之间通信都通过中央点进行。和总线型拓扑一样,由于CAN总线是个多主站结构的通信网络,只要总线是空闲的,任何一个端接节点都可以发送数据,CAN总线采用星型网络拓扑将有很多方面的优点,如:
(1)系统没有支线的概念,不存在支线反射现象;
(2)网络布线简单,连接工艺简单,不存在焊接造成的线束缺陷;
(3)不考虑集线器端口数量的情况下,总的线束长度不受限制;
(4)易于拓展,在原有线束上增加CAN通讯模块,无需更改原有CAN双绞线;
(5)支线长度没有严格限制,最长可达15米。
星型网络拓扑缺点如下,如:
(1)所需的线束长度较长;
(2)需要增加集线器;
(3)对中央及集线点通讯能力要求较高。
2.3 混合型
混合型网络拓扑即融合了星型和总线型两者,示意图如图5所示。
混合型网络拓扑融合了两者的优点和缺点,具体布置网络拓扑时要根據实际情况进行适当的调整以达到高效合理的网络拓扑。例如如果总体双绞线长度无法保证40米以内就不能单纯的采用总线型,但又出于低成本的考虑,可以采用混合型网络拓扑。
2.4 环形网络拓扑
将所有模块依次连接在一起,每个模块即需要负责各自的通讯,同时也要承担整个网络通讯的需求,如果一个模块出了问题,会导致整个网络瘫痪,目前汽车上很少应用这种拓扑结构。
信号传输介质。通常汽车高速CAN网络采用双绞线进行通讯,如图6所示,双绞线有屏蔽式和非屏蔽式两种,一般传统燃油汽车上通常使用是非屏蔽式双绞线。针对新能源或者混合动力汽车,因为高压部件自身屏蔽设计不合理会使CAN总线上具有很大的电磁干扰,因此通常会使用屏蔽式双绞线以减少电磁干扰的影响。
LIN通讯主要是基于CAN网络主节点进行网络通讯的,通常LIN通讯针对实时性要求不高的模块,如车身上天窗、氛围灯等。
诊断OBD接口通常可以设计在动力CAN上,同时也跨几路CAN网络,或者单独连接网关,单独连网关的设计通常是需要通过特定的安全访问才能读到整车报文,目的是起到一定的安全访问限制。
3 汽车网络拓扑发展规划
3.1 平台化
主机厂发展趋势是基于平台化的网络拓扑设计。即根据每个模块的功能定义及网络通讯策略,每个模块应在CAN拓扑应该有最优位置,避免经常性的变动各个模块在网络拓扑上的位置,造成拓扑通讯矩阵的混乱,不利于网络通信策略规划及诊断策略规划。平台化网络拓扑设计同时也可以实现各模块硬件最大平台化应用,从长远角度来讲,对主机厂及供应商都有一定的好处。
3.2 可拓展性强
未来网络拓扑规划要有较强的拓展性。当增加相应的电子模块后,原有的拓扑可以包容增加的电子模块而保证整个网络拓扑不发生较大改变,只改变局部的拓扑结构即可。这需要在设计拓扑时参考未来行业发展趋势,预测在哪路CAN网络上需要预留较大的网络带宽。
3.3 高速
CAN通讯在汽车上应用已经几十年了,目前及在很长的一段时间内是可以满足汽车通讯需求,但随着汽车智能化发展,尤其是针对未来可能实现的无人驾驶等技术在汽车上的应用,对信息实时处理速度要求非常高,对网络通讯速度提出了更高的要求。
3.4 简约化
随着域控制器在汽车上应用,整车控制器会更多的进行融合优化,基于控制模块的减少整车网络拓扑设计会趋于简单化,整车会使用较少的线束,信号将更多的依赖于模块内部的处理,实时性会大大提高。
4 总结
汽车拓扑设计就好比排兵布阵,合理的网络拓扑设计可以让汽车有更安全更卓越的电气性能,因此工程师在布局时要全面多角度进行规划,通过对模块功能、信号需求、实际布线长度、诊断策略、网络拓扑结构合理设计网络拓扑。
参考文献:
[1]邬宽明.CAN总线原理和应用系统设计.北京:北京航空航天大学出版社,1996.
[2]饶运涛,邹继军,郑勇芸.现场总CAN原理与应用技术.北京:北京航空航天大学出版社,2003.
[3]史久根,张培仁,陈真勇.CAN现场总线系统设计技术.北京:国防工业出版社,2004.
