基于3D数字化自动摊铺控制系统的沥青混凝土路面应用研究
2020-09-06黄立明
黄立明
宁德市蕉城宏鑫交通工程投资有限公司,福建 宁德 3521000
随着国内经济发展和交通发展要求的不断提高,不仅要求公路路面满足安全经济,舒适性能的要求也有所增加,也就要求路面施工质量也更加追求极致,对路面平整度的要求也越来越高,这就对沥青摊铺的水平提出新要求。基于数字技术的控制器具成为高性能摊铺机数字控制器的主流方向[1-3]。数字式超声波控制技术与微电脑恒速控制是目前国内外普遍采用的方法,且国内外普遍将先进的超声波和激光等非接触式自动找平装置应用于沥青混凝土摊铺机上,提升其对环境条件的适应性[4-5]。徐工通过承担“十五”国家863计划,“机群智能化工程机械——智能摊铺”项目和国际合作开发,创新运用现代网络、通讯、信息和微电子等技术研发了RP952/RP902E型摊铺机,使得产品的技术性能跻身于国际水平[6]。本文研究了沥青路面3D智能摊铺技术并对其在道路工程中的应用效果进行调查,旨在增强沥青路面施工过程中的信息化管理和控制,进一步提高沥青路面施工质量。
1 数字化智能摊铺控制系统
1.1 mm级GPS智能摊铺控制系统硬件组成
mm级GPS数字化摊铺智能控制系统是一种光机电液一体化智能控制系统,这种系统可用于对道路施工作业面的高精度整平,能够专门与相关施工机械配套并提高自动化水平。有四大部件组成,包括GNSS基准站、mm级GPS流动站和相应测量系统及测量数据设计软件和等。mm级GPS数字化摊铺系统可完成对摊铺机精确控制、熨平板实时定位和完全自动化施工作业。
1.2 mm级GPS数字化摊铺自动控制系统工作原理和适用范围
数字化摊铺系统是通过无线电发射器、GNSS基准站能够实时地向设定的流动站接收机发送差分信号,激光发射器向该流动站发射高程信息。该高程信息和差分信号与天空中GPS卫星信号汇集于mm级GPS流动站接收机系统中并行处理与运算从而实现即时的高程毫米级与GNSS平面厘米级定位。
在控制器中,GNSSRTK所获取的精度达到1~2cm的定位值会传送到计算机中,计算机即可计算出摊铺机的关键点的设计位置,从而获取此位置设计的高程。
熨平板摊铺的实际高程(精度在2~3mm)可以使用TopconLaser Zone激光技术计算获得,同时可实现以激光发射器所在水平面上下10°仰俯角、150m水平范围内和上下10m范围内立体空间待测目标体的精确测量。
1.3 mm级GPS系统工作流程
1.3.1 前期准备工作
前期准备工作依次包括仪器设备的安装、设置系统参数、架设与矫正激光发射器;设置GPS设备、基准站的架设、启动发射器、配置移动站设备、流动站站台设置、流动站天线设置、mmGPS接收机的设定、连接移动站、校正pocket-3D点;建立摊铺机且将摊铺机参数、激光参数数据、表面数据和控制点数据、校准液压输入系统;然后摊铺试验路段并进行搜集试验段摊铺虚铺数据、压实遍数、压实工序等相关试验参数。
1.3.2 实施摊铺
选定一已知高程点h,将激光发射器架设在该点上,并测量获取发射器的高度HL,激光发射器发射的是N型激光信号,当每个固定时间,接收器接受到激光信号时,即可确定发射器与接收器处于同一水平中线位置上
1.3.3 现场找平
上述实时监测到的摊铺机熨平板底部绝对高程,该实际绝对高程与控制器获取的设计高程经经控制器计算得出两者之间的差值,通过机载控制器中数模转换器转换成控制信号,该控制信号通过摊铺机伤的找平电磁阀进行接受,然后通过该控制信号进行控制摊铺机油缸提升及下降,据此进行熨平板上摊铺角度的调整,从而对摊铺机摊铺高程精准变化进行控制。但由于摊铺前路面很难保证一定平整,故整个摊铺过程中必须通过自找平装置来不断地调节熨平板的仰角,从而精准地控制摊铺厚度,压实后效果如图1。
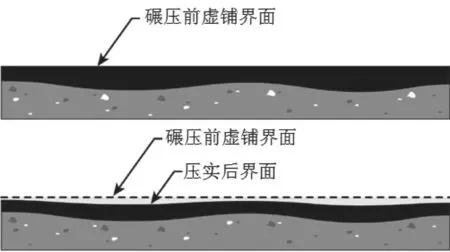
图1 压实前后效果示意图
2 现场摊铺应用研究
2.1 现场施工发射仪器与接收仪器布置
在现场摊铺施工之前要根据场地实际情况,道路设计规划图,测量放样点位及摊铺摊铺施工工艺等确定激光信号发射器发射点位置。经过室内设计和现场试验段摊铺研究,针对不同施工工况和摊铺机组合情况,有以下研究方案。

图2 现场激光发射器与摊铺机施工组合布置示意图
方案一布置组合模式适合道路路缘石以外无发射器布置场地及无中心绿化隔离带的情况;方案二在无路肩等适合场外布置激光发射器区域;方案三适宜于道路两旁具有路肩及路肩以外。在以上方案的基础上开展现场应用研究。
2.2 试验段摊铺研究
依据设计院规划设计图及相应的标准,后期采用常规摊铺设备、摊铺工艺,获取相应集料配合比进行试验段压实参数,以此试验数据进行设计院设计规划换算成采用摊铺3D数字自动化控制系统摊铺的虚铺数据。
通过分析仅采用基数相对较大的设计高程和实测高程进行可视化分析难以收到理想效果,故采用相对高差法进行数据初步处理,进而对所处理结果进行可视化显示。如图3所示。
2.2.1 相对高差法表面图和等值线图
由图3可以看出挂线施工起伏值在-18~30之间大步距起伏,变化大,数据离散度大。表现在沥青上面层摊铺上位有坑洼现象;如图可知3D数字化自动控制摊铺施工高差值表面差值区间为-3~22,表面起伏密集,变化平缓,无剧烈变化,峰数和谷数均一且较密集,体现了3D数字化自动控制摊铺施工的底基层平整度优于常规挂线施工。

图3 AC-13上面层挂线/3D设计与实测高程差表面图
3 3D摊铺数字化自动摊铺施工工艺
结合现场摊铺应用研究提出3D摊铺施工工艺流程图如图4所示。
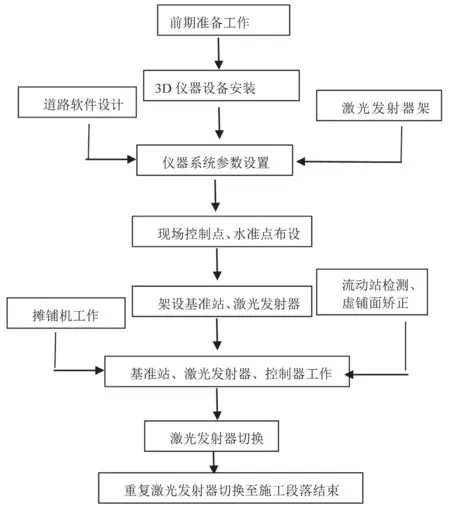
图4 3D摊铺施工工艺流程图
4 结论
(1)公路工程3D数字化自动摊铺控制技术较好克服挂线施工钢丝绳挠度、底基层下承层压实度不足、平整度不达标等不良因素,实现了自动施工、自动找平功能。
(2)建立使用公路工程3D数字化自动摊铺控制技术在公路工程施工中平整度质量评价新模式(路面高差等值线及基础面色标评价法),为前场施工人员实时掌握施工质量和改进机制提供了一种新的途径或手段。
(3)提出3D摊铺数字化自动摊铺施工工艺流程,为使用3D摊铺数字化自动摊铺提供参考依据。
