基于KEA128芯片的无线节能智能车硬件设计
2020-09-04吕纯池
吕纯池
(武汉理工大学 汽车工程学院,湖北 武汉430000)
随着现代科学技术的发展与进步,智能化、信息化、自动化的程度越来越高。智能化作为当前研究的热点,广泛应用于汽车、医疗、航空航天等各领域。智能车作为一门以现代汽车电子技术为核心并且交叉融合多门学科的技术,有着广阔的发展前景。
本文介绍的无线节能智能车基于“恩智浦智能车”竞赛。采用恩智浦公司32位单芯片微型计算机S9KEAZ128AMLK作为唯一的核心控制单元。通过恒功率充电装置对超级电容完成充电、电磁信号采集道路信息、陀螺仪测算方向、运用编码器测速来对电机实行PID控制。在单片机的决策与规划下,各个模块之间相互协调配合,实现智能小车的稳定循迹行驶。
1 无线节能智能车系统的整体架构
本系统硬件架构主要由5大模块组成。
1.1 无线充电模块
无线充电模块作为无线节能车的核心模块,其恒功率充电方案效率决定了超级电容能否在短时间内获得足够多的电能。
1.2 电源模块
电源模块负责为其他模块的正常工作提供稳定的电源,电源转化效率以及工作范围是最需要考虑的。
1.3 最小系统模块
在竞赛规定的所有单片机型号中,KEA128是在满足基本功能的情况下,消耗电能最小的,可以达到节能的目的。
1.4 传感器模块
传感器模块作为整个系统的眼睛,保证它采集信号的准确,传递信息的稳定是首要考虑的。
1.5 电机驱动模块
电机驱动模块用来控制电机开关,在保证工作稳定性的前提下,要求尽可能结构简单、体积小巧。
2 智能车主要模块硬件的设计
2.1 无线充电模块设计
无线充电技术源于无线电能传输技术。现如今在新能源电动汽车领域、移动设备领域等都有着非常广泛的应用。本文设计的是小功率无线充电系统,它通常采用电磁互感现象,通过磁场耦合线圈完成电能的传输。电磁感应式无线充电系统的由高频逆变电路(能量变换机构)、发射和接收端的耦合线圈(能量传输机构)、整流滤波(能量拾取机构)三部分组成。
2.1.1 接收线圈的设计
在发射端限定功率的情况下,接收段线圈通过串联谐振高频电容使其发生谐振。通过观察无线发射端信号值可以测量线圈的接收功率,由多股纱包线绕制接收线圈安装在尽量低的位置时,可以获得最大的输出功率。
2.1.2 恒功率电路设计
要使得接收端线圈获得最大功率,还需要测量整流完的电路的电压电流。AD8217作为一款高压、高分辨率的分流放大器,可以用来检测电路中的电流电压,并且能够直接连接转换器。同时,它有着较大的工作范围、较大的工作温度范围。在它的分流电阻上执行单向电流测量能够实现电源管理的偏置控制。具体测量原理为:通过高频电容整流后的直流电,首先通过两个电阻分压送入单片机的ADC读取,获得输入端的电压值,然后经过AD8217进行电流采集,也是通过ADC获取,得到输入端的电流值。由P=UI,计算出接受端的功率P。
2.1.3 恒功率电路的反馈控制
BQ24640RVA作为一种同步开关模式电池充电控制器,可以控制电路中的电流输出的大小。它能够高效地控制超级电容,通过将PWM转化成电压值送入到BQ24640RVA芯片的电流反馈端,这样,该模块的输出电流就会受此PWM的控制,然后就可以进行PID运算控制,前端采集的电压电流即为反馈信息,PWM输出为控制,这样就能控制输出的电流大小。因为超级电容组的电压是缓慢上升的,所以控制住电流也就相当于控制了功率,这样就组成了所谓的恒功率电路。基于Altium Designer的恒功率充电仿真电路如图1所示。
图1基于Altium Designer的恒功率充电仿真电路
2.2 电源模块设计
本文采用超级电容作为电源,通过对赛道长度和车模电能消耗的估算,采用2.7 V/3.3 F的6个超级电容串联作为电源。超级电容有以下特征:①储存电能过程中没有发生化学反应;②充放电速度很快,同时有着很高的能量转化效率;③储存电能的过程是可逆的,使用寿命长,可以反复充电几万次。
2.2.1 升压转换电路设计
本文采用TPS61088芯片作为电源模块的升压转换器。由于超级电容在放电过程中电压会逐渐下降,为了使电路中的电压维持稳定,避免因为电压变化导致信号的波动,所以需要使用DC-DC模块将超级电容输入的变化电压转变为一个固定的电压值。TPS61088有着2.7~12 V的宽范围输入,能够很好地将超级电容(0~10 V)的电压转换,可以使得超级电容尽可能被使用完,以此来达到节能的目的。同时,该器件具备10 A开关电流能力,能够为主板和电机提供足够大的电流。其高达12 V的输出电压,能够为电机提供足够大的驱动电压,以此提高电机的转速,同时避免因为电压过低,导致电机过热,损坏电机。
2.2.2 开关电源电路设计
电源分为开关电源和线性电源,其特点为线性电源成本低、技术成熟,对电路干扰和噪声小,但体积大,效率偏低。开关电源虽然交流纹波稍大,但是其低耗散、废热少、效率高(效率可达90%以上)。
电源模块对于整个控制系统至关重要,稳定、高效率的电源模块不仅仅可以使系统工作稳定,信号传输准确,也能够降低电能的损耗。因此,在设计电源模块的时候选用开关电源,根据各个模块的电源需求,主要由3.3 V和5 V两种电源。同时,还要考虑超级电容放电经过升压后高达12 V,需要选择输入范围合适的开关电源模块。
本文采用了Texas Instruments公司的LMR14010ADDCR(5 V输出)和LMR23610(3.3 V输出)两款降压芯片。两款芯片都具有宽范围输入,工作温度范围大的特点,能有效地保证电源值的稳定,同时有着很高的电压转化效率。LMR23610供电模块原理如图2所示。LMR14010ADDCR供电模块原理如图3所示。
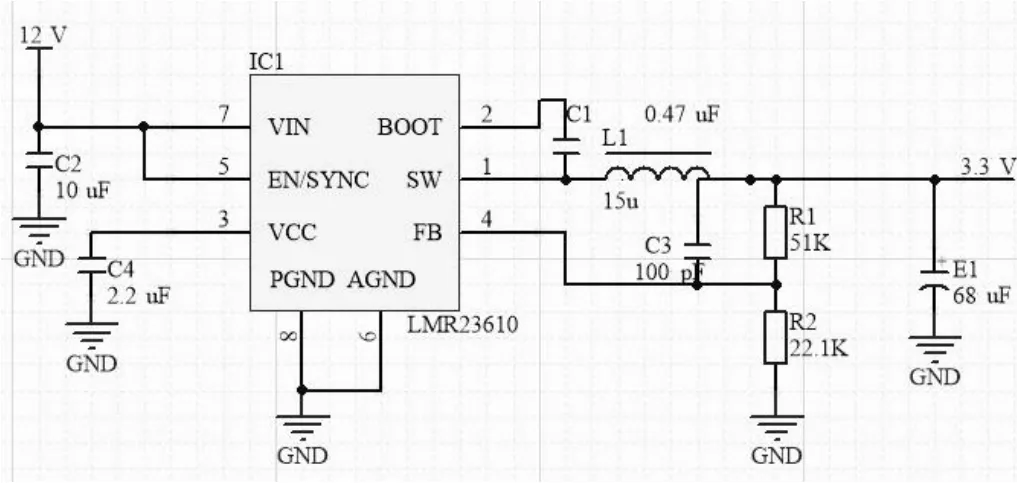
图2 LMR23610供电模块原理图
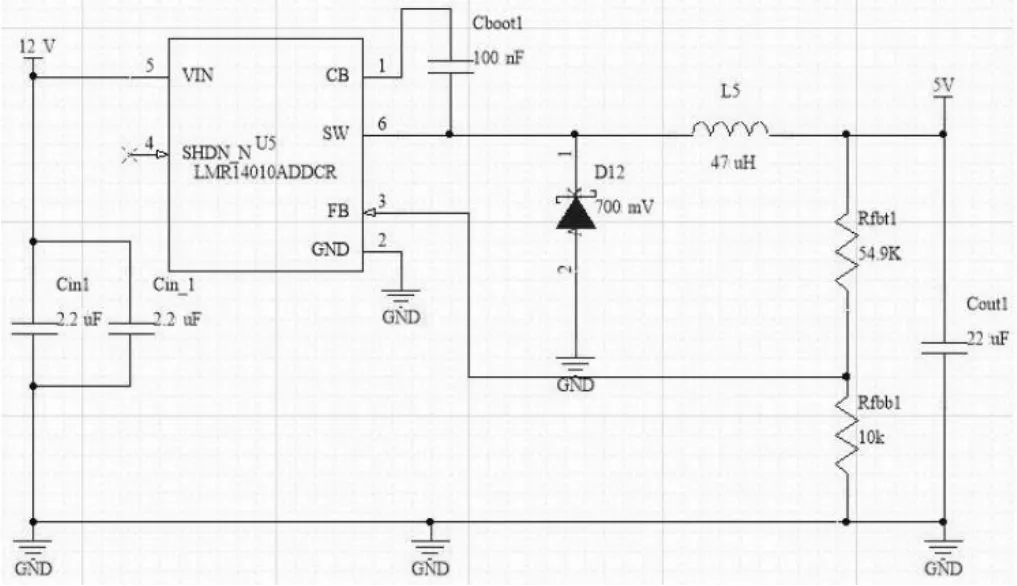
图3 LMR14010ADDCR供电模块原理图
2.3 最小系统模块
本文选用S9KEAZ128AMLK微控制器,其为恩智浦公司KEA(Kinetis EA)系列之一。其内核基于32位ARMCortex-M0+,具可扩展性高、功耗低的特点。KEA系列MCU支持很多第三方开发工具,比如Keil、IAR以及MQX等。开发者可在上述的开发环境中,快速、方便地进行设计。常用模块功能的基本功能与外接器件如下。
FTM模块:正交解码、PWM,应用于电机驱动、脉冲计数。
ICC、SPI模块:通信协议,应用于MPU6050。
UART模块:数据传输,应用于上位机、串口、蓝牙。
ADC:数模转换,应用于陀螺仪、传感器。
2.4 传感器模块设计
传感器模块主要包括陀螺仪和电磁传感器模块两部分。陀螺仪作为一种角运动检测装置,可以判别物体的运动状态。本文选用的MPU6050为整合性6轴运动处理组件。陀螺仪需要固定在小车的正中间,保证采集信号的准确性。
电磁传感器模块可以检测赛道中变化的磁场信号。主要应用LC谐振的原理,产生感应电流,再通过集成运算放大器处理后,将信号传递给KEA128的AD进行决策规划,判断当前道路信息。在采集道路信息的过程中,需要保证电磁传感器的固定稳定,避免因为振动导致信号的波动,影响数据的准确采集。
2.5 驱动电机模块
驱动电机模的功能是将KEA128单片机传来的信号按照设定的控制要求,转换为加在单片机控制端和电机之间,用来控制电机开通或关断的信号。
本文设计选用的是A4950电机驱动模块,它相对于竞赛中常用的全桥驱动电路,结构更加简单、体积小,能够有效减小实际PCB板的面积,使得车模体积更小,以此减小整车质量,达到减少电能消耗、节能的目的。
3 结束语
通过仿真电路设计后的硬件系统,经过制板后可以成功地运用在无线节能小车上,恒功率无线充电模块的设计可以让超级电容在短时间内获得足够的电能,加上开关电源模块的高效率转化与电机驱动的小巧可以有效减轻整车的质量,在到达节能目的同时,让小车稳定循迹运行。
