激光扫描仪在大车运行安全保护中的应用
2020-09-03孙慧利蔡沛辰江成效
孙慧利 蔡沛辰 江成效
1 青岛海西重机有限责任公司 2 山东港口青岛港董家口分公司
1 引言
为了保证门座起重机、卸船机等设备的安全运行,防止起重机与起重机之间、起重机与人之间或起重机与障碍物之间的相互碰撞[1],需要在大车运行机构两端安装有效的防撞装置。随着港口起重行业对安全性能的要求越来越高,对门座起重机、卸船机的大车运行安全系统也提出了更高的要求。目前广泛应用于大车安全运行装置的为行程开关和单点激光传感器组合方案,只检测传感器、行程开关前方的某个点,若工作时大车轨道两侧的情况比较复杂,易使检测精度大大降低,无法真正起到检测人、障碍物以及活动物体的作用,也就无法实现真正意义上的防撞。随着二维激光扫描仪的广泛应用,对传统的起重机大车安全运行装置进行了改造,设计了一种无接触式激光扫描安全装置。
2 起重机大车运行安全系统现状分析
目前港口起重机的大车运行安全系统的常规方案主要有以下几种。
(1)单点激光传感器和行程开关方案。该方案是目前门座起重机大车运行安全防护主流方案,优点有防护等级高、检测距离远、抗干扰能力强、成本低等。缺点是必须有反射板配合使用,只能用于同轨道上的2台设备之间的安全防撞,不能防止设备与人之间的碰撞或设备与障碍物之间的碰撞;检测范围只有1条直线,不能检测直线区域外的物体;单点激光限位只能输出1个开关量信号用于减速,机械式限位用于停车;安全系统在起重机大车内外侧有障碍物的时候,检测不到障碍物。

图2 陆侧激光扫描仪安装布局图
(2)超声波测距方案。其优点有防护等级高,最高可达IP67;可输出2个开关量点,分别用于设置减速区和停止区;分辨能力强、反应速度快、成本低等。缺点为检测距离短,扫描区域较小,扫描角只有十几度;户外使用时会因受到天气的影响而产生一定的干扰;2个超声波测距仪不能相互对射,会产生干扰从而无法判断2台设备之间的真实距离,易导致大车运行的安全防护失效,不太适宜用在大车运行机构上。
(3)雷达测距方案。其优点为检测距离长、有两个独立可调节的检测区域、反应速度快、抗干扰能力强、不受天气环境影响、性能稳定。缺点为扫描角度小,只有11°~13°;雷达波传感器对人体的感应性能差,不能有效预防起重机设备与人之间的碰撞。
3 激光扫描仪大车运行安全系统
自动化的大车安全运行系统必须具备两方面的技术,一方面是自动化检测,另一方面是自动化控制[2]。经过对起重机大车运行安全系统的现状分析,并结合近期多个国外项目对起重机生产作业的安全性需求,设计了起重机大车运行安全系统方案。该系统配置二维激光扫描仪4只(R2000)、大车绝对值编码器(P+F)、PLC系统(S7-1500)、大车机构变频器(ACS800)、触摸屏、笔记本电脑。系统框图见图1。

图1 大车运行安全系统框图
3.1 系统工作方式
系统设置若为检测模式,当障碍物进入起重机运行的检测区域时,触摸屏发出灯光报警(黄色闪亮);系统设置若为控制模式,当障碍物进入起重机运行的控制减速区域时,触摸屏发出灯光报警(黄色常亮),同时主机PLC发出指令,控制大车运行变频器减小输出力矩,使起重机减速运行;当障碍物进入起重机的控制停车区域时,触摸屏发出灯光报警(红色常亮)和联动台蜂鸣器报警,同时主机PLC发出指令,控制大车运行变频器停止输出力矩,使起重机停车。
3.2 二维激光扫描仪原理及安装
3.2.1 二维激光扫描仪工作原理
二维激光扫描仪最基本的功能就是激光测距。激光发射器发射激光,照射到物体表面后再反射被接收器接收,根据被接收回来的能量大小计算出物体表面的反射率。时间计数器记录这一过程的时间,再通过S=1/2ct(c为光速,t为时间)得到目标点与扫描仪之间的距离。同时各传感器会记录激光发射的二维角度θ,再利用坐标系之间的相互转换关系计算出目标点的X、Y坐标。最终大量带有二维坐标和反射率信息的点在电脑上呈现出真实二维尺寸的环境信息。
图3 海侧激光扫描仪安装布局图
3.2.2 激光扫描仪的布置及参数设定
本安全系统中采用的激光扫描仪是德国倍加福公司的R2000 Detection检测型二维激光扫描仪。在起重机大车运行机构的4个角上分别安装1套激光扫描仪(见图2、3),激光扫描仪通过以太网与PLC控制器通讯,PLC控制器与司机室触摸屏通讯。PLC控制器、大车电机变频器、大车电机、增量编码器形成大车运行机构的闭环控制。通过激光扫描仪将扫描数据与大车的位置、路径数据进行对比,扫描行车路径上是否存有障碍物,扫描结果可在司机室触摸屏上以画面的形式显示,PLC控制器可防止大车运行与行车路径上的障碍物发生碰撞。通过设置警示灯和警报器,增强安全运行系统的预警机制,及时提醒大车周围工作人员危险情况的发生,提高大车运行的稳定性和安全性。
激光扫描仪硬件安装完成后需对其参数和扫描区域进行相应设定。起重机大车的行驶速度一般在25~30 m/min。以意大利Fincantieri港门机项目为例,根据大车减速、停车过程的计算对激光扫描仪的3个检测区域进行设定。
(1)Info检测区域:检测距离10 m,黄色区域。
(2)Slow down减速区域:检测距离为6 m,橙色区域。
(3)Alarm/Stop停车区域:检测距离为3 m,红色区域。
激光扫描仪将实时扫描数据通过以太网发送给PLC控制器,PLC控制器将接收到的扫描数据与预设定的大车路径数据以及绝对值编码器计算出的大车实际位置分别进行对比,根据对比结果,判断大车的预行进路径上是否存在可能与大车发生碰撞的障碍物。若对比结果表明大车路径上存在障碍物,则PLC控制器根据逻辑计算发送减速、停车指令给大车电机变频器,控制大车执行电机减速至停车。同时可通过设置激光扫描仪的3路开关量点来对扫描区域进行设置,将开关量动作信息和PLC控制器的对比信息互相校对,达到精准控制的目的。
3.3 大车运行绝对值编码器

图4 大车运行机构绝对值编码器布局图
大车运行绝对值编码器安装在起重机运行机构从动车轮上(见图4),其编码数据经过计算后可以转化为起重机在轨道上的位置数据。通过现场总线通讯接口,将起重机位置坐标数据传输到主机PLC控制器。PLC控制器将大车的位置数据与障碍物的具体位置信息进行比较,逻辑判断。
3.4 大车运行安全系统的PLC程序编写
大车运行安全系统的功能实现,除了硬件设备的安装及参数设定以外,还有一个重点就是PLC程序的编写,以实现对大车运行安全更加有效、全面的保护。
大车运行减速、停止程序段见图5。
大车绝对位置程序段见图6。
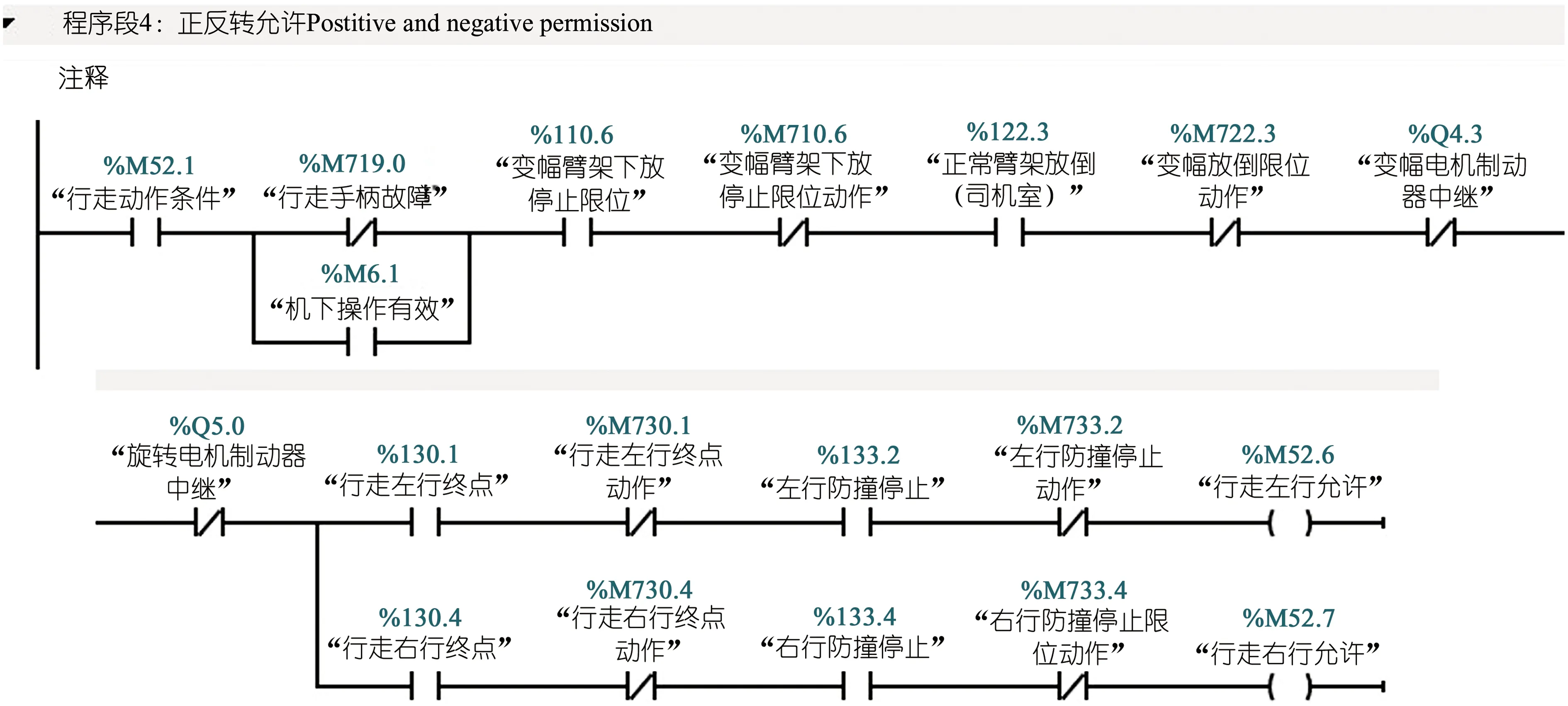
图5 大车运行减速、停止程序段

图6 大车绝对位置程序段
4 大车运行安全系统的优点和注意事项
与现有技术相比,大车运行安全系统合理地运用了二维激光扫描仪,将扫描数据与预设定的大车的路径数据进行对比,预判行车路径上是否存有障碍物;根据预判结果,可及时防止大车与行车路径上的障碍物发生碰撞。通过设置警报器,增强大车安全运行系统的预警机制,及时提醒大车周围工作人员危险情况的发生,从而提高大车的安全性。大车运行安全系统也可有效地避免因大车司机视线被遮挡而发生操作失误的情况。采用二维激光扫描仪的方案,消除了现有的常规机械式安全防撞系统在遇到障碍物时突然停止对起重机设备产生较大冲击的情况,可延长起重机的使用寿命。激光扫描仪为非接触测量,具有数据采样率高、分辨率和精度高、抗干扰能力强、响应快等优点,非常适合散货码头现场的运行环境,不受雨、雾等恶劣天气条件的影响,性能稳定可靠,调试维护简单。该激光扫描仪还具有人体检测的功能,可以有效地避免人身安全事故,这是其他防撞产品所不能实现的。
在激光扫描仪的工作过程中仍需要注意一些实际问题,这样才能保证激光扫描仪的正常工作,并有效提高工作效率。首先激光扫描仪要加装防护罩以保证其工作范围内不会出现较大干扰,工作人员要定期对码头内的工作环境进行检查,避免干扰因素留下安全隐患。其次则是对于激光扫描仪技术的应用,并不能完全放下警惕之心,在激光扫描仪工作过程中,要增加监管维护力度,避免因意外情况而导致停工,造成不必要的经济损失[2]。
5 结语
在起重机大车运行安全系统的设计中,创新地运用了二维激光扫描仪,充分发挥其工作特性,增加其灵敏度及动作可靠性,并对PLC控制程序做了相应的调整,实现了起重机设备与障碍物、起重机设备与人员之间的检测和安全保护,极大地提高了起重机设备大车运行的安全性,有效防止了人身安全事故的发生[3]。该起重机大车运行安全系统可确保起重机生产作业安全,提高生产效率、经济效益和社会效益。
