四足压电驱动装置的电源设计与研究
2020-09-03贾丹平杨晓峰王振华
贾丹平,韩 硕,杨晓峰,王振华
(1.沈阳工业大学 光电检测实验室,辽宁 沈阳 110870;2.复旦大学 集成电路与系统国家重点实验室,上海 200433;3.复旦大学 超精密运动控制与检测实验室,上海 200433)
0 引言
高精密运动控制平台一般要求运动精度在亚纳米和亚微米级。国内外多数采用一种由新型智能材料压电元件制成的高精度微型运动电机[1]。由于其在微定位系统中的高响应和高精度的优势,成为高精密运动控制平台中的核心零部件。压电元件是一种具有容性特点,且能产生很小的可重复形变的材料。依据压电元件这一特性设计的四足压电驱动装置,具有体积小,推力大,噪声小,发热率低及定位精度高等特点,其在微电子测量、光学仪器[2]和超精密机床[3]等领域占有重要地位。
四足压电驱动装置由压电电极片和压电陶瓷片相互堆叠构成。由于堆叠层数较多,导致容性负载参数值较大[4-6]。容性负载是一种带电容参数的负载,具有电压滞后的特性[7],致使驱动信号波形衰减严重。采用常规的压电驱动装置电源的四足压电驱动装置,其驱动信号不完整,会出现相移精度和定位精度不准的问题,同时也导致整个运动过程中推力大小不均[8-10]。因此,本文设计了一种四足压电驱动装置的电源。
四足压电驱动电源采用硬件阻抗补偿和信号切换两种方法,解决了信号频宽较窄和延时较大的问题。该电源主要用于容性负载的四足压电驱动装置中,是一种具有高电压、高频率的驱动控制电源。通过硬件在环仿真实验中发现,信号切换方式既能减少运动过程中的振动,又能提高定位精度,阻抗补偿法不但可以改变频宽,还能增大硬件使用寿命。因此,本文主要针对四足压电驱动装置设计了一种可控性的驱动电源。
1 四足压电驱动装置
图1为四足压电驱动装置,由4个压电叠堆足构成。其中每个压电叠堆足均由电压信号驱动,顶部覆盖着绝缘陶瓷氧化铝片,且通过氧化铝片与外壳柔性铰链表面接触。压电叠堆足分别由上、下运动叠堆(厚度叠堆)和左、右运动叠堆(切向叠堆)构成,利用摩擦惯性原理驱动中间动子运动,从而形成了一维直线运动四足压电驱动装置。

图1 四足压电驱动装置
四足压电驱动装置中每个压电叠堆足均由两种运动模式共同协作运行,依赖外壳的柔性机构控制压电驱动叠堆足的伸长、收缩及切向运动。在整个运动过程中,厚度电压信号输入先将压电叠堆足贴紧动子后,保持厚度位移不变,此时输入切向电压信号使压电叠堆足依靠与动子间的摩擦产生相对运动。然后减少厚度输入电压使叠堆足厚度收缩,减少切向输入电压使叠堆足切向回归原位处于垂直(零位)状态,进而完成四足压电驱动装置步进运动。综合文献[11-12]可知,电压值(A)的大小决定了叠堆足的伸长量,电压上升时间(t)决定了叠堆足摆动的角度大小,即切向运动位移量。单足压电驱动机理图如图2所示。图中,Xs为切向运动位移,Yc为厚度运动位移,φ为摆动角度,Us为切向运动位移输入电压,Uc为厚度运动位移输入电压。

图2 单足压电驱动叠堆运动原理图
由图2可知,在理想条件下得到切向运动和厚度运动关系式为

(1)
式中:C1为切向运动的常系数;C2为厚度运动的常系数。进一步得到位移与驱动输入电压信号间的关系为
(2)
式中C3、C4分别为切向和厚度运动的常系数。综合式(1)、(2)的函数关系,若在理想条件下,设定函数关系为线性函数关系,故可得到驱动信号函数方程:

(3)
式中:us(t)为切向运动驱动电压信号;uc(t)为厚度运动驱动电压信号。依据式(3),建立了在控制理论中的状态方程为
(4)
由式(4)可知,在控制原理中的输出变量与输入变量间的关系,其中过程系数为常量。本文假设初始状态为0。
2 压电驱动电源
依据单足压电驱动叠堆运动原理可得,整体机构四足压电装置运动位移就是切向运动位移。依据式(3)、(4),建立驱动电压信号与四足压电驱动装置运动信号间的关系。通常对于步进电机和压电电机驱动装置的电源为正弦驱动信号电源[13-14],采用换相法使电机相对运动。本文提出了一种新叠堆结构的四足压电驱动装置,当输入驱动信号为正弦波时,电机的定位精度发生改变。
图3为位移实验结果图。由图可知,当输入信号为正弦波时,四足压电装置运动位移不均匀,导致定位精度低。电机厚度运动和切向运动无法处于交错运动,故使电机动子一直处于相对滑动的状态。在某个时刻,壳体对于动子无法保证预紧力是相对恒定的,不能满足四足压电驱动装置的应用。因此,本文采用信号切换方式实现该四足压电驱动装置输出稳定位移,从而提高了定位精度。依据四足驱动装置运动机理分析,得到理想驱动信号输入和位移输出图,如图4所示。

图3 位移实验结果图

图4 四足压电驱动电源信号图
由图4可知,分别对厚度电压驱动信号和切向电压驱动信号做理想化拟合,得到了标准的位移输出曲线。图中,切换控制过程是单足叠堆切向方向换相的转折过程。先将电压驱动信号建立数学模型后,应用硬件在环系统进行仿真实验。在Matlab/Simulink搭建模型如图5所示。
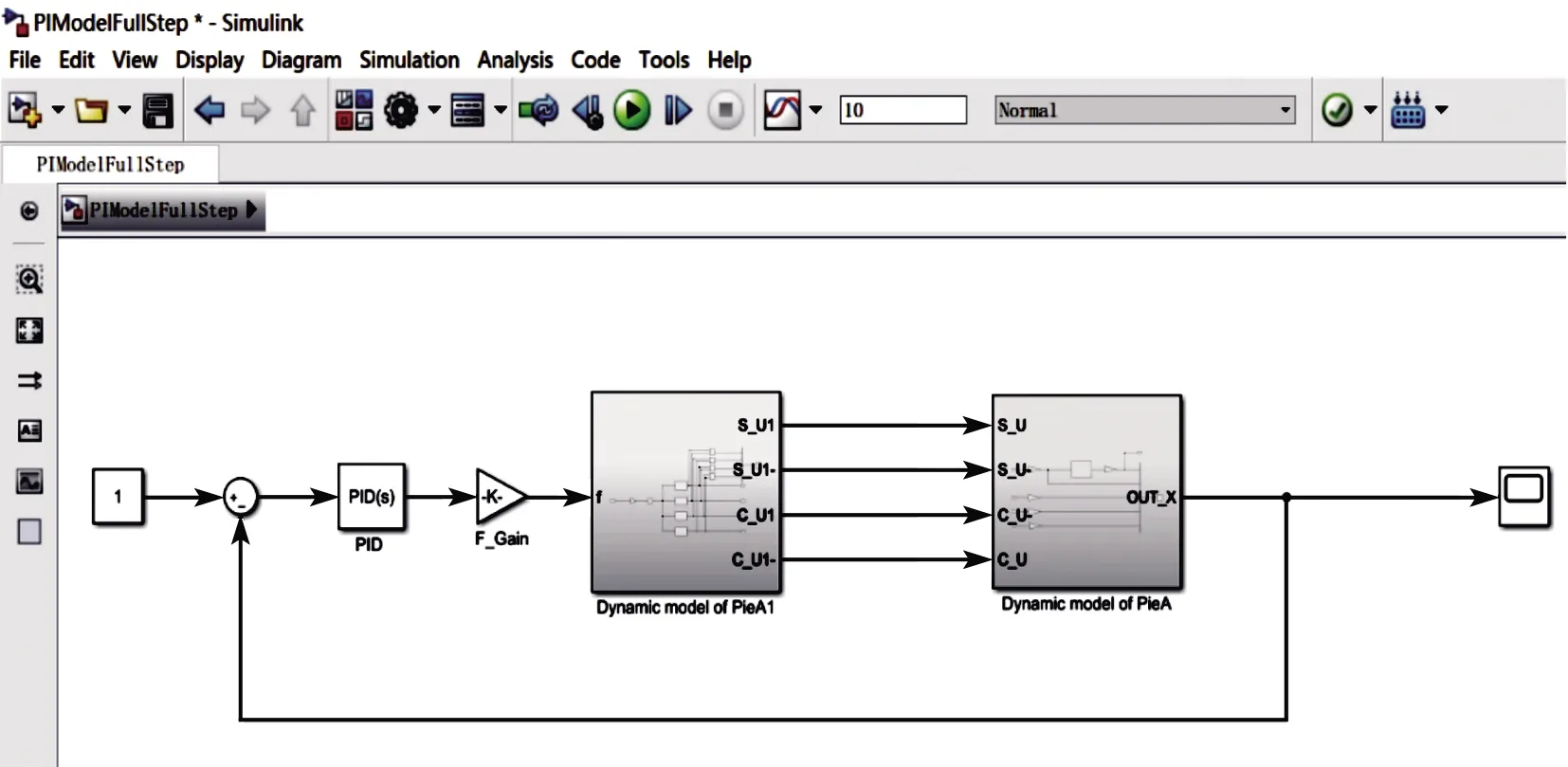
图5 在环仿真模型图
图5采用比例、积分、微分(PID)调节系统进行位置闭环控制。驱动输出信号子模型由数学方程推导和搭建。模型中还包括四足压电驱动装置的动力学模型。建立硬件环仿真测试平台,先对整个系统中的驱动信号模型进行测试与预估,也可排除一些非故障性问题。示波器模块实时观测输出与输入信号,得到仿真测试结果如图6所示。

图6 仿真测试图
由图6可知,设定切向电压信号和厚度电压信号成交替输入的方式。当切向电压逐步上升和下降时,厚度方向电压保持不变,使叠堆足与动子间始终紧贴。此时预紧力较大,保证了电机动子稳定运行。当切向摆动回到零位时,厚度方向电压逐步下降,厚度叠堆工作收缩进而抬高使切向叠堆足回零位。解决了四足电机出现回退的问题,从而完成了整个信号的切换过程。
3 实验系统测试

图7 信号产生流程图
为验证压电驱动电源是否能够提高四足压电驱动装置运动精度,搭建了整个实验测试系统平台。整体设计流程主要包括信号的生成、波形的产生及信号的功率放大3个重要部分,如图7所示。搭建驱动电源实物,驱动四足压电驱动装置得到实际输出位移曲线,与仿真位移曲线进行误差分析,验证该驱动电源的可靠性和实用性。
为了验证整个流程的可行性,搭建了实验测试系统,测试平台布置情况如图8所示。

图8 实验系统布置图
该实验平台主要由电源部分、驱动器和检测系统组成。采用±250 V线性可编程电源和±15 V开关电源分别供电MOS功率管放大模块和运放芯片。驱动器由多核处理器、现场可编程门阵列(FPGA)和直接数字式频率合成器(DDS)信号发生器组成。由上层的PC控制驱动信号输出和观测运动实际轨迹曲线,用示波器KEYSIGHT观测输出驱动信号,驱动信号输出如图9所示。应用激光干涉仪作为位移测量系统。

图9 驱动信号输出图(无阻抗匹配)
通过实验发现,功率放大电路对于信号频宽干扰大,不同材料的压电陶瓷电机阻抗值不同。电机容性负载阻抗和电路阻抗不匹配导致整体信号输出失真较严重,对于在电路设计的过程中进行阻抗匹配,才能减少信号失真,增大频宽。根据实验要求测得在不同频率下切向和厚度叠堆的阻抗值(R,L,C),如表1所示。
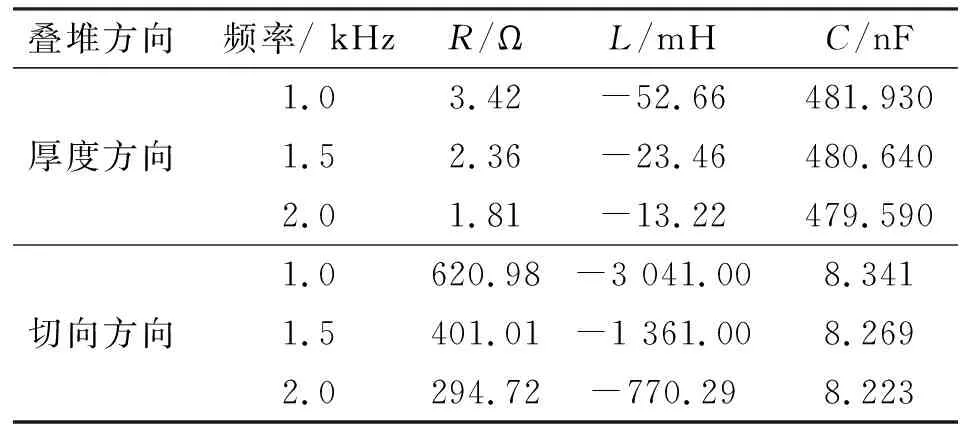
表1 不同频率下的等效阻抗表
由表1可知,在1.5 kHz时,厚度叠堆阻抗值为2.36 Ω+480.64 nF,切向叠堆的阻抗为401.01 Ω+8.269 nF。因此,在功率放大电路中应采用阻抗匹配法[15]。依据戴维南定理公式计算功率放大电路的等效阻抗值:
(5)
式中:RTH为厚度方向匹配电阻;RTL为切向方向匹配电阻;Z0为匹配后的阻抗值。
依据戴维南定理匹配公式计算匹配的电阻和电容值,将RTH高输入阻值替换串联式电容。应用Multisim14.0软件对匹配电路进行仿真与测试,在整体电路仿真中发现该阻抗匹配法能增大低电压的偏置,RTH与RTL两个电阻值很难选择,无法准确匹配到电压平衡点。因此,主要采用交流并联方法对Z0进行阻抗匹配。对功率放大电路进行阻抗匹配如图10所示。

图10 阻抗匹配电路图
为进一步证明该匹配电路方法的有效性,应用仿真波特图进行分析如图11所示。
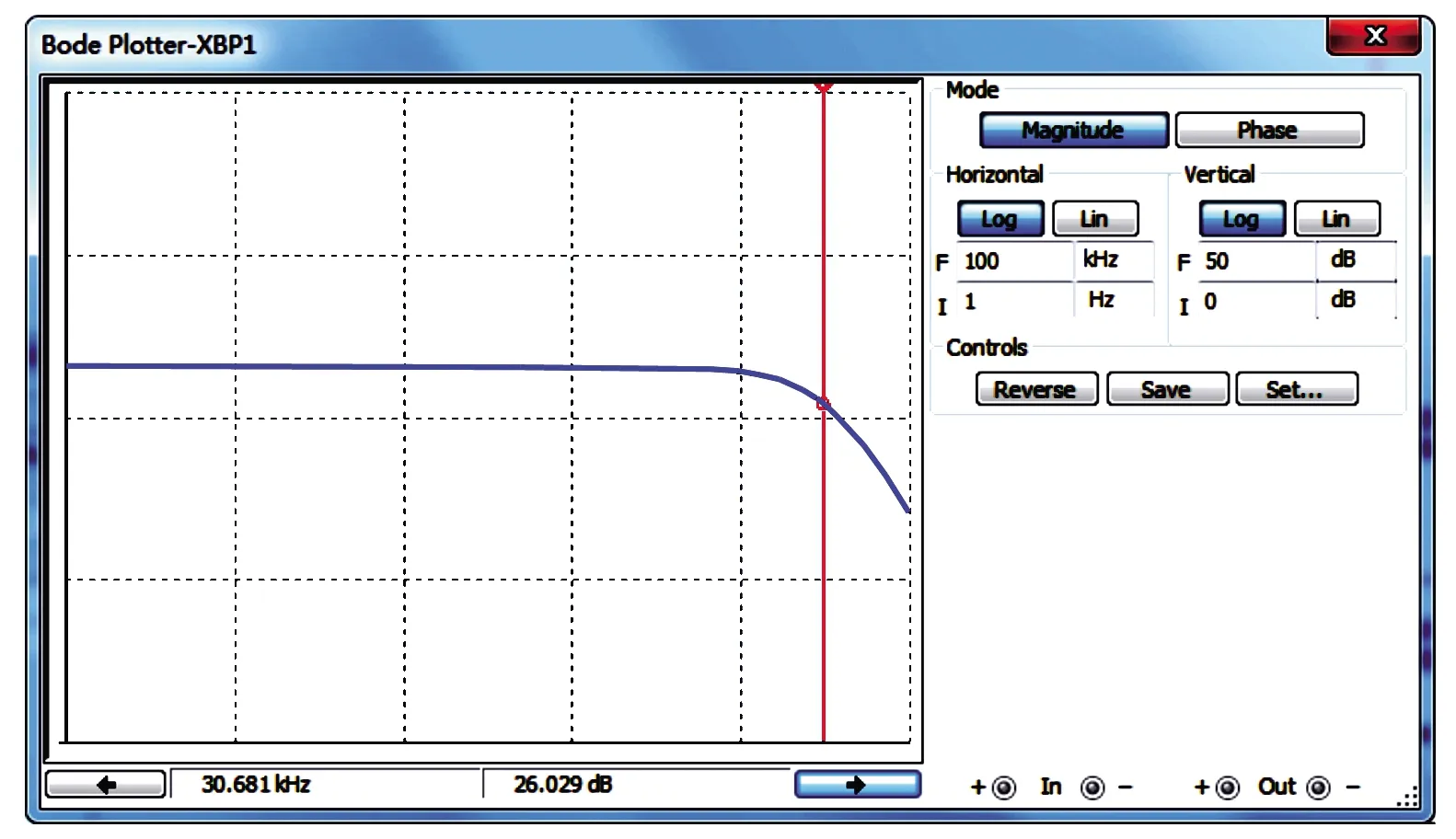
图11 仿真波特图
由图11可知,系统在-3 dB临界点频率为30 kHz,满足1.5 kHz交流信号输出的需要,有效地解决了信号的衰减问题。阻抗匹配后由示波器观测到驱动信号输出如图12所示。

图12 驱动信号输出图(有阻抗匹配)
为了验证驱动电源的可靠性和精度,在实验中还采集了具有容性负载的四足压电驱动装置实物得到的运动轨迹。应用高精度4 kHz采样率的激光干涉仪对运动步长进行位移采集,并与仿真模型轨迹进行对比以验证驱动电源是否达标。激光干涉仪采集位移曲线如图13所示。

图13 激光干涉仪采集位移曲线图
由图13可知,应用该驱动电源通过实际测量得到的位移与模型进行对比,得到单步步长为50 nm,而实际单步步长为50.7 nm,相对误差为1.38%,该驱动电源满足实际应用需要。由图还可知,位移基本保持线性关系,明显减少了四足压电驱动装置的抖动问题。因此,本文设计的驱动电源提高了四足压电驱动装置的运动精度和定位精度。
4 结束语
本文设计的四足压电驱动装置的驱动电源,具有电压为±250 V和频率为1.5 kHz的电源特性。应用阻抗匹配和信号切换法,解决了信号频宽问题,得到了一种具有良好响应特性的驱动电源,产生了高精度相对运动位移为50.7 nm的稳定轨迹,该电源实现了四足压电驱动装置驱动电源的指标。本文不仅通过硬件在环仿真进行了预测,还通过实验方法得到了输出位移和实际轨迹,进一步证明了驱动电源的实用性。
