基于倾斜摄影测量的室内外三维实景模型重建及精度评定*
2020-09-03马力鹤朱彦博陈美云
马力鹤,朱彦博,山 岚,陈美云
(1.甘肃交通职业技术学院,甘肃 兰州 730070;2.中国电建集团西北勘测设计研究院有限公司,陕西 西安 710065)
随着测绘科学技术水平的不断提高,倾斜摄影测量技术[1-5]也得到快速发展。目前,基于倾斜摄影测量技术的室外三维实景建模应用[6-8]较为广泛,室内三维实景建模应用和室内外联合三维实景建模应用较少。但基于三维激光扫描技术[9-11]进行室内三维建模和室内外联合三维建模技术应用较为广泛。本文基于倾斜摄影测量技术进行室内外联合三维实景建模方法的研究。
1 研究概况
1.1 研究对象简介
本文研究对象是一座机电工厂,该机电工厂室外场景内地物较为复杂,多为构造复杂的电力设备和建筑物。室内场景内空间较为空旷,多为中小型机械设备。通往室内外的大门较为宽敞,适合实验研究。
1.2 研究技术流程
基于倾斜摄影测量的室内外三维实景模型重建主要分为室内三维实景模型重建和室外三维实景模型重建,并对其建模结果进行精度评定。具体的技术流程如图1所示。
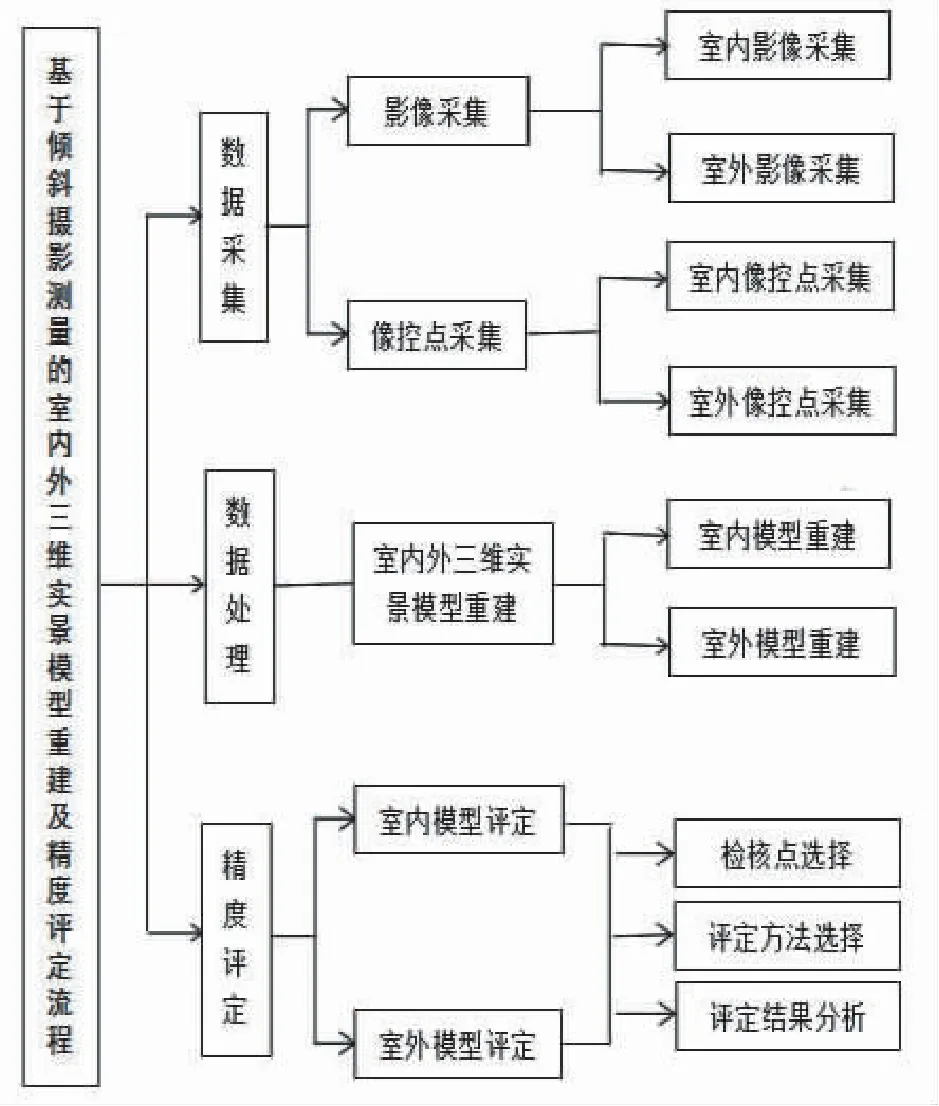
图1 基于倾斜摄影测量的三维实景模型重建技术流程图
2 室内外数据采集
2.1 室内外影像采集
室内外影像采集使用不同的拍摄方法,其中室内影像采用地面拍摄,室外影像采用空中拍摄的方法。
2.1.1 室内影像采集
室内影像采集使用的是佳能Canon EOS 6D MarkⅡ数码相机,有效像素为2 620万,传感器尺寸为35.9 mm×24 mm,画幅为全画幅,如图2所示。

图2 室内影像采集设备
室内影像采集是通过室内倾斜环绕拍摄的方法,分为4个倾斜环绕方向和一个垂直环绕方向拍摄,其中连接室内墙面的墙角进行近距离加密拍摄,以便于进行室内三维实景建模的重建。拍摄影像尺寸为6 240×4 160像素,共拍摄653张,其中删除4张由于模糊、过度曝光等原因拍摄的影像,参与室内实验研究的影像共649张。
2.1.2 室外影像采集
室外影像采集使用的是大疆精灵DJI Phantom 4 Pro 无人机,有效像素为2 000万,传感器尺寸为13.2 mm×8.8 mm,卫星定位模块为GPS/GLONASS双模,如图3所示。

图3 室外影像采集设备
室外影像采集是通过室外倾斜拍摄的方法,分为4个倾斜方向和一个垂直方向拍摄,其中连接室内外的位置进行近距离加密拍摄,以便于进行室内外三维实景建模的重建。拍摄影像尺寸为4 096×2 160像素,共拍摄537张,其中,删除7张由于起飞冗余拍摄、过度曝光等原因拍摄的影像,参与室内实验研究的影像共530张。
2.2 室内外像控点采集
室内外像控点采集使用不同的测量方法,其中室内像控点采集使用的是传统的测量方法,室外像控点采集使用的是目前常用的GNSS RTK测量方法。
2.2.1 室内像控点采集
室内像控点采集使用的是拓普康Topcon -MS05A全站仪,测角精度为±0.5″,免棱镜测距范围为0.3~40 m ,免棱镜测距精度(ISO17123-4:2001)为(1.0+1ppm×D)mm。
室内像控点采集时,将室外的控制点通过全站仪引测到室内进行像控点测量,采集的像控点选择在室内有明显特征、有利于连接室内外构建模型的点位上,共架设2测站,采集像控点24个。
2.2.2 室外像控点采集
室外像控点采集使用的是中海达HI·TARGET V30 GNSS RTK系统,RTK平面定位精度为(10+1ppm×D)mm,高程定位精度为(20+1ppm×D)mm。
室外像控点采集时,将GNSS RTK系统上的坐标系通过七参数转换,转换到与室外控制点的坐标系一致。采集的像控点选择在室外高差变化较大、有利于连接室内外构建模型的点位上,共采集16个像控点,其中,10个为平面控制点,6个为高程控制点。
3 室内外三维实景模型重建
3.1 空中三角测量计算
空中三角测量计算是室内外三维实景模型重建的核心工作,主要分为四个部分:影像导入、像控点导入、标记像控点和计算。
3.1.1 影像导入
首先筛选数码相机拍摄的室内影像和无人机拍摄的室外影像,将冗余、模糊和曝光过度的影像进行删除,以避免空中三角测量计算错误或失败。然后新建一工程,将室内影像和室外影像分别导入Smartd 3D软件中。
3.1.2 像控点导入
像控点导入之前,需要将全站仪测量的室内像控点和GNSS RTK系统测量的室外像控点进行格式转换,转换成Smart 3D软件可识别的统一格式(点名XYZ),其中像控点坐标的分隔符只能识别用空格代替的分隔符。
3.1.3 标记像控点
室内外像控点标记工作要分别进行。首先选中室外像控点坐标,在无人机拍摄的室外影像上进行标记像控点。然后选中室内像控点坐标,再在数码相机拍摄的室内影像上进行标记像控点。其中,每个像控点要标记在5张影像上,以便于将无人机拍摄的5个方向的影像和数码相机拍摄的5个方向的影像有效地连接在一起。像控点标记完成后软件自动检查像控点标记工作的残差,以便于进行标记工作的精度检查。
3.1.4 计算
空中三角测量计算实际上也是平差的过程。首先新建一区块,然后选择空中三角测量计算的定位模式,定位模式为具有地理参考坐标系,选择该定位模式是为了利用控制点对块进行精确方位调整。
在空中三角测量运算过程中,软件会显示空三丢失照片的数量。如果丢失照片过多,可以取消此次空三运算,删除这个空三区块,选择不同的设置重新执行空中三角测量。如果输入照片的重叠率不够或者某些设置不正确(比如像方坐标系等),那么空中三角测量操作有可能失败。
3.2 室内外三维实景模型重建
室内外三维实景模型的重建效果如图4、图5、图6所示。由此可见,数码相机拍摄的室内影像联合无人机拍摄的室外影像进行三维实景模型重建效果较为理想。
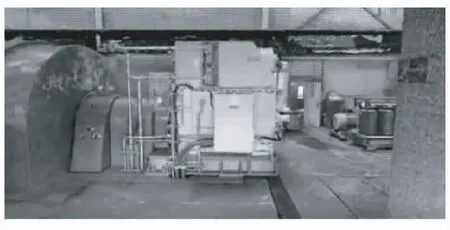
图4 室内局部三维实景模型
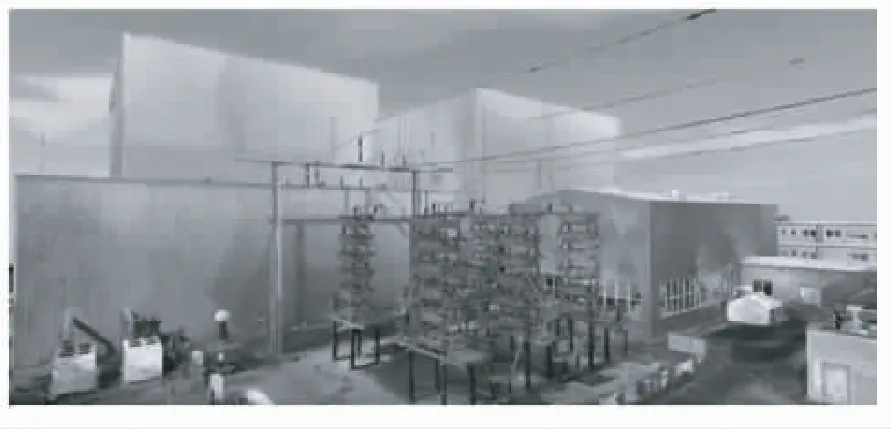
图5 室外局部三维实景模型

图6 室内外局部三维实景模型
室内三维实景模型整体较为完整,但是由于拍摄的角度和影像重叠度较小的影响,致使局部细节模型存在着缺陷(变形、拉花等问题),影响建模的效果和建模的精度。
室外三维实景模型整体较为完整,但是由于室外的局部电力设备构造较为复杂,对重建的室外三维模型的视觉效果和建模精度影响较大。致使放大后室外电力设备三维实景模型显得较为粗糙。
连接室内外三维实景模型的部位较为完整,除了存在由于使用不同的相机传感器原因造成的色差外,其它的连接部位将室内和室外模型融合的较为完整。
4 室内外三维实景模型精度评定
室内外三维实景模型精度评定的检查点、线主要选择在室内和室外具有明显特征的位置上。另外,根据室内外三维实景模型的区域大小,选择平面和高程检查点共40个,选择检查线20条。
评定方法主要是对三维实景模型上测量点的坐标和测量线的尺寸与实物全站仪、GNSS RTK系统测量的点坐标和线尺寸进行对比,对比的平面、高程和边长的误差分布统计分别如表1、表2和表3所示。其中三维实景模型和实物测量的点、线数值均为三次测量的平均值。
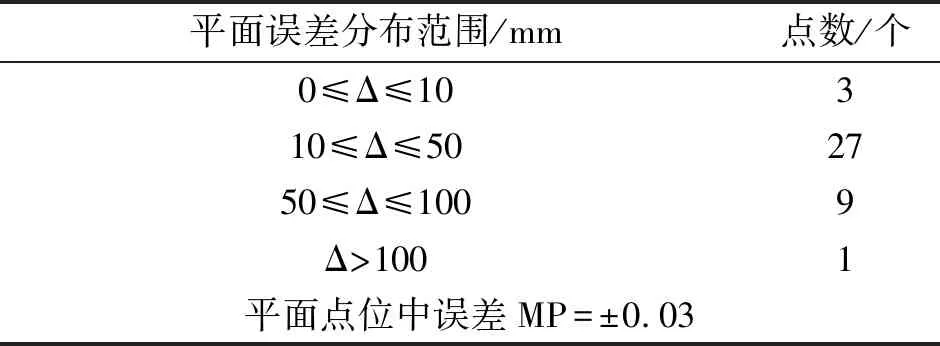
表1 平面检查点误差分布统计
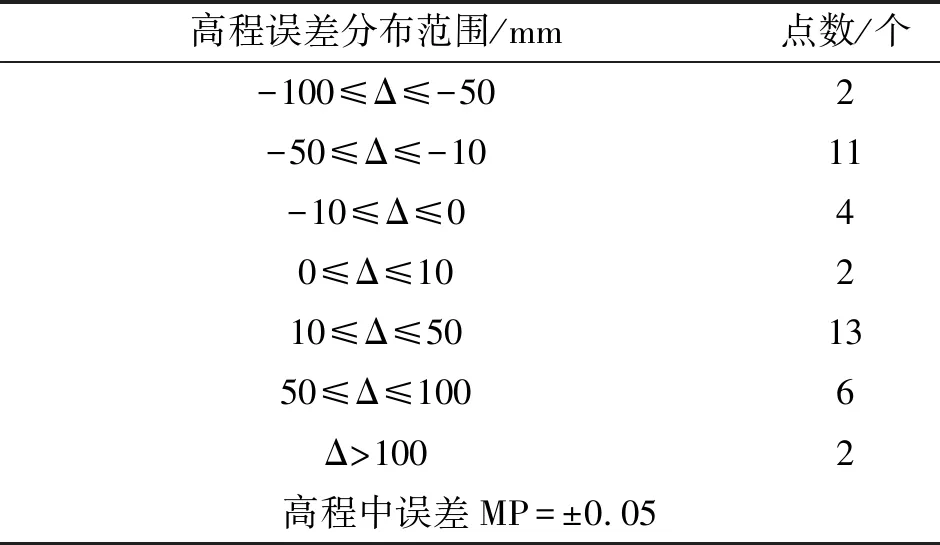
表2 高程检查点误差分布统计
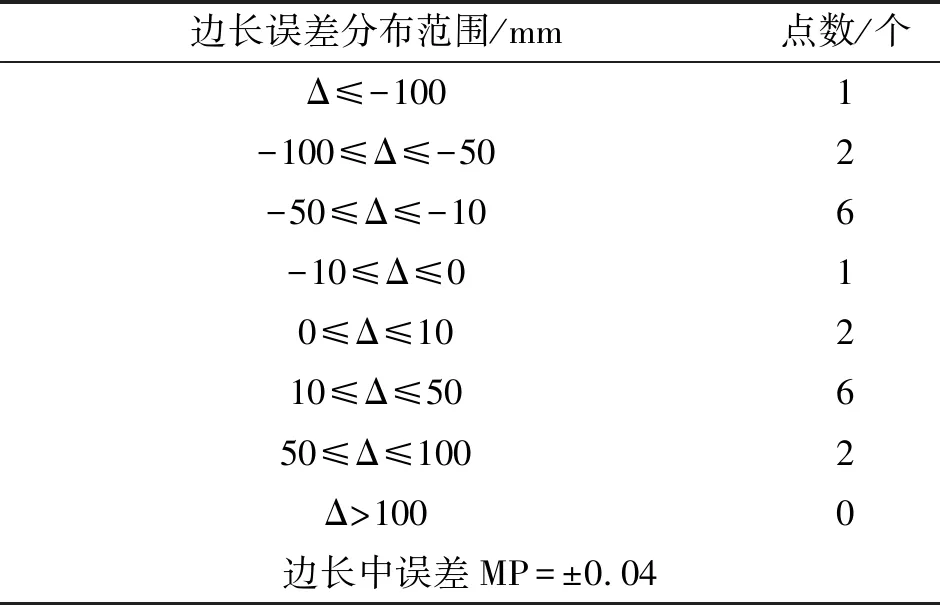
表3 边长检查线误差分布统计
通过对表1 、表2和表3的数据分析得出平面检查点中误差为0.03,高程检查点中误差为0.05,边长检查中误差为0.04。在对室内和室外的点、线进行检查时发现,室外的检查点、线的差值明显大于室内检查点、线的差值。由此可见,室外三维实景模型的精度相对于室内三维实景模型的精度较差。
5 结 论
综合上述分析得到:
基于倾斜摄影测量重建的室内外三维实景模型完整性较好,建模精度较高,满足相关领域的三维建模精度要求。
针对室内场景和室外场景选择合理的仪器和方法在实验中起着重要作用。实验中还存在以下几个问题:
(1)是否可采用三维激光扫描技术将室内外构造复杂局部较为精确地重建。
(2)如何将室内外连接部分的色差消除,更好地融为一体。
