用于车辆提升的升降码分机设计及有限元仿真
2020-09-02朱朝晖侯正权刘大可
朱朝晖,陆 雄,张 云,侯正权,刘大可,刘 卫
(云南昆船设计研究院有限公司,云南 昆明 650051)
0 引言
汽车作为交通运输的核心载体,在交通运输业中占据着举足轻重的地位。据国家公安部交管局统计[1],仅2015年,我国新增汽车就达2 385万辆,且年增量呈现剧烈上升的趋势。汽车数量的剧增给城市中有限的车位数量带来了巨大的压力。空间立体车库[2-4]可实现对车辆的自动存取,具有节约空间、车位数量多等优势。不少学者对空间智慧停车库和汽车提升系统进行了较为全面的研究[5-6]。
韩立芳等[7]基于TRIZ理论进行了方案设计、论证与结构设计,提出了一种拥有32个车位的“双环拱型分体轿箱垂直旋转式”新型立体车库。胡文龙等[8]利用梳齿交错结构,通过共用横移机构减少驱动电机数量的方式,给出了一种应用场地广、占地面积小的悬浮式旋转停车库。孟广耀等[9]利用单个载车板实现4个方向移动的一种九宫格式新型立体车库,为立体车库的发展提供了一种新思路。张家毅等[10]提出了一种通过控制系统和调度系统与城市智慧停车云平台联网对接,使空间闲置停车位信息能自动发布的一种升降穿梭式停车系统。Sun等[11]将驱动电机安装在垂直升降式立体车库的升降平台上,通过直接对载车板进行驱动,得到了高效率的自动存取车系统。
不难看出,人们对智慧停车系统进行了许多的研究并取得了一定的科技成果,但较少考虑存取车时汽车的稳定性问题和升降平台的弹性变形问题。本文主要基于空间多层停车库,提出了一种能实现汽车垂直升降到达指定停车层的升降码分一体机,对升降平台受载产生的沉降进行有限元仿真分析,并基于升降平台的动态变形量优化了控制系统,保证升降平台边缘始终与地面近似平齐,使搬运小车能安全、稳定地将车辆搬运至升降平台上,降低了因升降平台弹性变形而造成的系统误差。
1 码分机结构设计
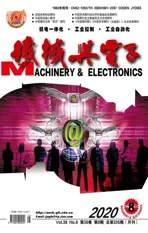
基于立体停车库的升降码分机,通过抓取载车板使位于载车板上的汽车在三维立体空间内升降,实现车辆在地面与三维停车库间进行位置交换,达到自动存取车的目的。其总体结构设计如图1所示。
其中,实现对载车板进行码分抓取功能的结构如图2所示。该结构主要采用码分四杆机构运动原理,通过控制器使转板摆转入载车板支撑孔内,结合升降平台的升降动作实现车辆的升降,同时还可对地坑内的载车板进行码垛或拆分,增加存取车效率。
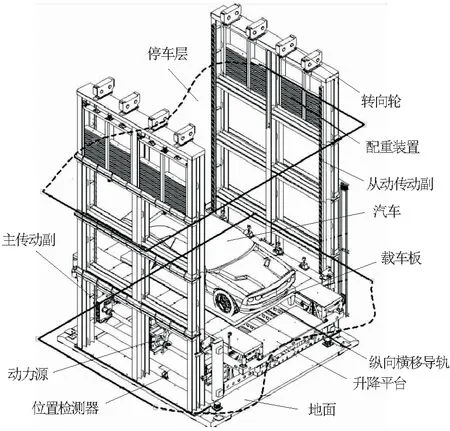
图1 升降码分一体机总装结构

图2 码分抓取机构
升降码分机的控制系统如图3所示,主要基于PLC主控制器实现车辆存取。通过该控制系统实现车辆的自动存取流程如图4所示。存车时由图2所示的码分机构从地坑内取出载车板,车辆驾驶至载车板上后通过升降平台将车辆提升至指定停车层,智能搬运小车将载有汽车的载车板搬运至三维空间停车库中指定的车位内,完成汽车的空间存放,取车流程与该流程相反。

图3 控制系统
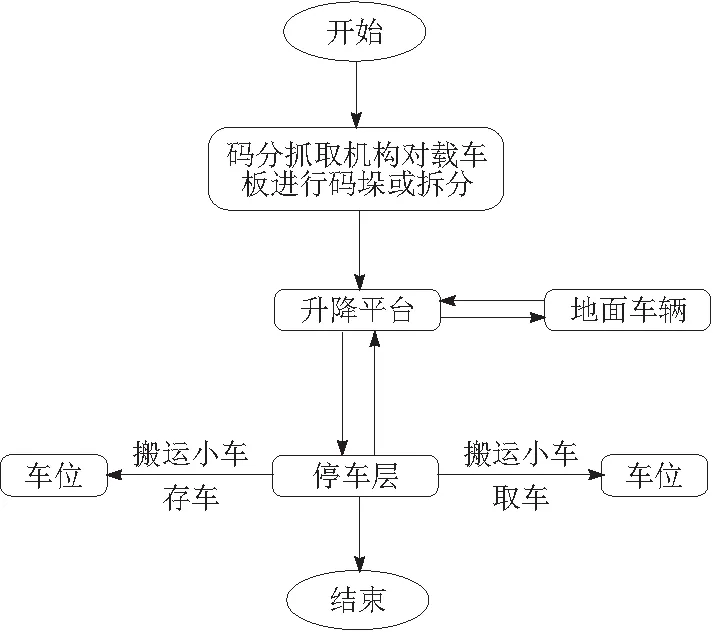
图4 车辆存取流程
2 力学分析
为了使该升降码分机在对汽车进行提升时能尽量减小能耗、降低经济成本,采用了图5所示通过增加配重装置的技术手段使提升更加容易。在工作过程中,设升降平台从静止状态以a的加速度对汽车进行提升,最大运动速度为v,传动齿轮的分度圆半径为r,则可得传动齿轮的最大受力Fh为
(1)
m1,m2,m3,m4分别为升降平台、智能搬运小车、载车板和汽车的质量;a为运动加速度;m为被提升物的质量总和。可计算得
(2)
在升降码分机中,共设有4个传动齿轮,由式(3)可计算得单个传动齿轮所受到的扭矩T和各驱动电机的最小功率P。

图5 配重装置和总体受力示意
(3)
r为传动齿轮分度圆半径;n为驱动电机的额定转速。由式(3)可知,采用增加配重装置的方式能大大降低驱动电机的所需功率,从而降低经济成本。其中,驱动电机的实际功率应满足P实>P,配重装置按大量工程经验取额定载荷的40%~50%,即按如下标准确定:
(4)
m1为升降平台的质量;me为升降平台承受额定载荷的总质量,主要包括智能搬运小车、载车板和汽车,其中配重装置的总重量为定值。
3 升降平台弹性变形与补偿研究
在对汽车进行存取工作时,由于传动副的扭转变形和升降平台的受载弹性变形会使得升降平台发生叠加沉降,造成升降平台所在的平面低于地面。系统中最大的误差就来源于升降平台与地面间形成的错位量,这样的误差会使得搬运小车难以将车辆从地面搬运至升降平台上。造成系统因升降平台弹性沉降产生的误差而降低存取车精度,达不到工作要求。因此,以汽车入库时为研究对象,出库时与入库的弹性变形情况相反。

图6 传动副扭转变形示意
传动副受前述较大的扭矩T会产生如图6所示的扭转变形情况,其变形扭角为γ,使得系统产生误差值为Δl的弹性沉降量。由式(3)可得在该模型中,传动齿轮受T的扭矩产生的扭角为
(5)
G为切变模量;Ip为极惯性矩;GIp为扭转刚度,为定值;r为传动齿轮分度圆半径;L为传动轴扭转段的长度。并由此可计算得到由于传动副的扭转而产生的系统误差值为
(6)
除了上述传动副受载扭转变形而产生的误差外,当智能搬运小车以v的速度将载有汽车的载车板托运至升降平台上时,可将升降平台看作图7实线所示的悬臂梁结构。图7中,A,B分别为两侧齿轮齿条接触固定点,在受搬运小车、载车板和汽车载荷的作用下,升降平台会产生图示粗实曲线的局部弹性沉降,使系统又产生误差值为Δh的下降量。

图7 升降平台受载变形与弹性补偿情况
取向上为正,并根据力矩平衡可得到A,B处的支反力为
(7)
m2,m3,m4分别为智能搬运小车、载车板、汽车的质量;L为A,B间跨距;b为B点与受力点间的距离。并由此可得Δh的计算模型为
(8)
E为材料的弹性系数;I为截面极惯性矩;EI乘积表示刚度系数,为固定的常数值。其中,L不变,最大挠度Δh与b成正比。通过叠加前述系统产生的误差值,可得智能搬运小车在托运汽车入库时,系统产生的总误差值Δhz为
Δhz=Δl+Δh
(9)
现进行有限元仿真计算,基于SolidWorks Simulation有限元仿真模块,定义前述工况参数如表1所示。
通过有限元的迭代计算,得到图8所示的由升降平台弹性变形产生的系统误差值。其中,图8a为搬运小车刚与升降平台接触时的位移云图,误差值约为6.39 mm,升降平台上最大应力为121 MPa,满足强度要求;随着搬运小车的继续运动,经过1 s,得到图8b所示的位移云图,其误差值Δh为6.07 mm。
通过整合搬运小车在运动过程中由于升降平台边缘沉降产生的系统误差值Δh,得到表2所示的误差值Δh随时间t的变化关系。
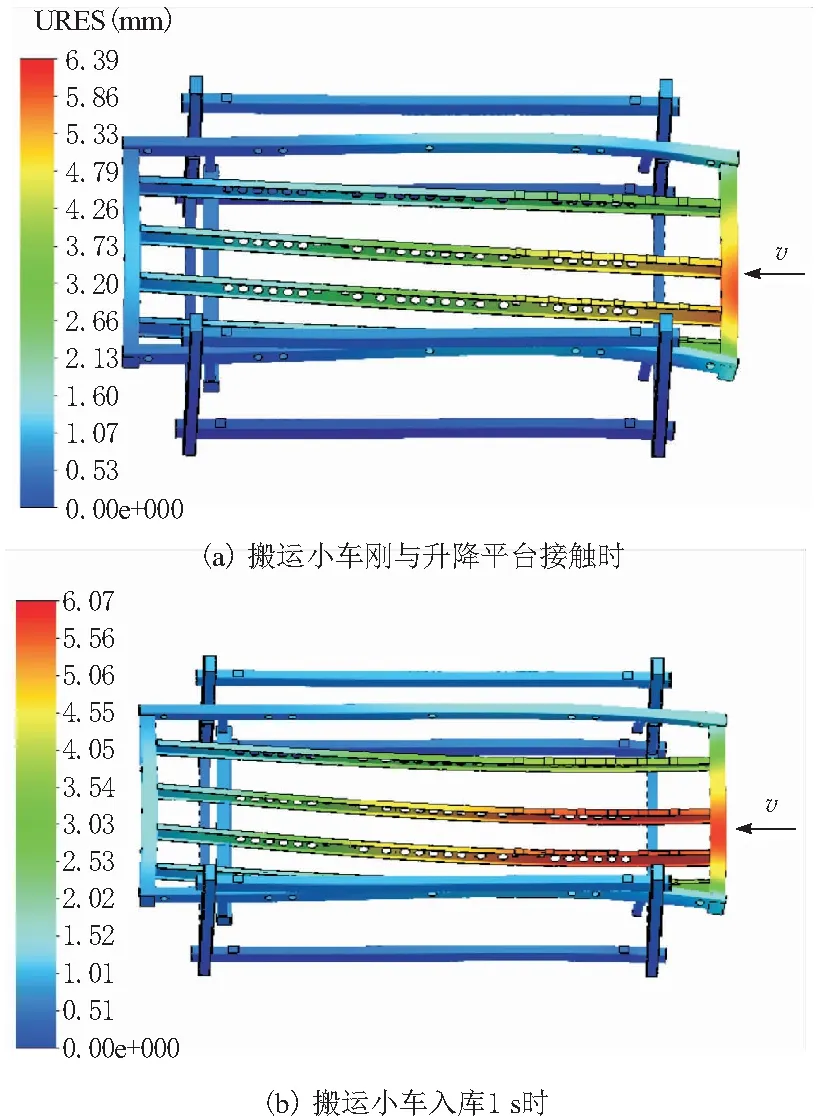
图8 升降平台弹性变形量表2 误差值随时间的变化关系

时间/s0123456位移误差/mm6.396.075.695.234.804.404.01
同理,通过实际计算得到升降平台满载时扭转力矩为1 875 N·m,仿真计算得到图9所示传动副的扭转变形情况。其中,最大应力为22.2 MPa,满足强度需求,得到由传动副造成的系统误差值约为1.2 mm。

图9 传动副扭转变形量
整合得到表3所示系统产生的总误差值随时间的变化关系。

表3 系统总误差随时间的变化关系
通过对“总位移-时间”的拟合,得到车辆在入库过程中系统总误差Δhz随时间的函数变化关系式,即
(10)
为了保证升降平台与地面的错位量在智能搬运小车的适用范围之内,降低前述误差值为Δhz的错位量,确保系统运行的可靠性,需对控制流程进行优化。如图7中虚线所示,即当搬运小车搬运车辆入库时,通过控制器使升降平台上升补偿,补偿量约为7.61 mm,随着搬运小车的继续运行,由式(10)可得图10a所示升降平台补偿量随时间的变化调整关系。通过如图10b所示的优化流程,有效降低了升降平台与地面间的错位量,减小了系统误差。

图10 升降平台的弹性补偿
4 结束语
基于空间智慧立体停车库,设计了一种能将地面上的汽车高效率地提升至上层空间停车库的垂直升降码分机,并基于SolidWorks Simulation模块对升降平台的弹性变形量进行分析,得到如下结论:
a.车辆入库过程中升降平台最大应力为121 MPa,满足强度需求。
b.车辆刚接触升降平台时,其边缘总弹性沉降量最大,为7.59 mm,在车辆完全进入升降平台时,边缘总弹性变形量约为5.35 mm。
c.系统中最大的误差来源于升降平台边缘产生叠加沉降量而造成升降平台与地面间形成的错位量。通过图10所示的车辆出入库时升降平台补偿量随时间的变化关系,对控制系统进行优化,使升降平台边缘与地面近乎处于同一水平面,极大地减小了升降平台与地面间的错位量,保证了系统存取车辆的精度要求,有效降低了因升降平台弹性变形而产生的系统误差。
该升降码分机对解决城市汽车数量与车位数量之间的矛盾问题具有一定的现实意义,所提出的升降平台升降补偿量随车辆入库时间的函数模型能大大提高车辆存放的稳定性,为智慧停车的创新发展提供较为全面的工程指导。