原子惯性导航将大幅度地压缩GNSS卫星导航的应用空间
——GNSS测量成果应用问题之五
2020-08-31刘基余
刘基余
(武汉大学测绘学院,湖北 武汉 430079)
据法新社2013年4月25日报道,美军正在研发新一代导航系统,用于替代易受干扰的GPS卫星定位系统。这一系统将不再依赖卫星,它将被集成在以立方毫米为单位的超小芯片上,被称之为原子惯性导航。
1 惯性导航概况
和天文导航一样,惯性导航也是一种自主式的导航技术。按照惯性测量装置在运载体上的安装方式,分为平台式惯性导航系统(惯性测量装置安装在惯性平台的台体上,如图1所示)和捷联式惯性导航系统(惯性测量装置直接安装在运载体上),后者能够省去平台,但是,仪表工作条件不佳(影响精度),计算工作量大。
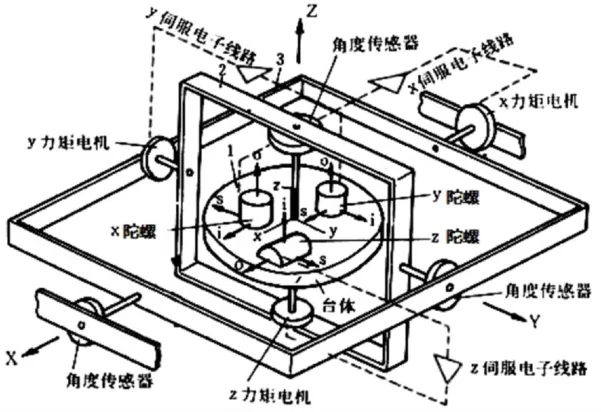
图1 惯性平台的结构
一个惯性导航系统(INS,Inertial Navigation System),一般由惯性测量装置、计算机、控制显示器等部件组成。惯性测量装置包括加速度计和陀螺仪(称之为惯性导航组合):3个自由度陀螺仪用来测量飞行器的三个转动运动,3个加速度计用来测量飞行器的3个平移运动的加速度。计算机根据测得的加速度信号计算出飞行器的速度和位置数据。控制显示器显示各种导航参数,实现导航功能。惯性导航系统的优点:一是由于它是不依赖于任何外部信息,也不向外部辐射能量的自主式系统,故隐蔽性好且不受外界电磁干扰的影响;二是可全天候、全球性、全时间地工作于空中地球表面乃至水下;三是能提供位置、速度、航向和姿态角数据,所产生的导航信息连续性好而且噪声低;四是数据更新率高、短期精度和稳定性好。它的缺点:一是由于导航信息经过积分而产生,定位误差随时间而增大,长期精度差;二是每次使用之前需要较长的初始对准时间;三是设备的价格较昂贵;四是不能给出时间信息。
1954年惯性导航系统在飞机上试飞成功;1958年“舡鱼”号潜艇依靠惯性导航穿过北极时,在冰层下航行了21天。中国从1956年开始研制惯性导航系统,自1970年以来,在多次发射的人造地球卫星和火箭上,以及各种飞机上,都采用了本国研制的惯性导航系统。近年来,我国的惯性导航技术已经取得了长足进步,液浮陀螺平台惯性导航系统、动力调谐陀螺四轴平台系统已相继应用于长征系列运载火箭。其他各类小型化捷联惯导、光纤陀螺惯导、激光陀螺惯导以及匹配GPS修正的惯导装置等,也大量应用于战术制导武器、飞机、舰艇、运载火箭、宇宙飞船等。
惯性导航技术在国防装备技术中占有非常重要的地位。对于惯性制导的中远程导弹,一般说来命中精度70%取决于制导系统的精度;对于导弹核潜艇,由于潜航时间长,其位置和速度是变化的,而这些数据是发射导弹的初始参数,直接影响导弹的命中精度,因而需要提供高精度位置、速度和垂直对准信号,目前适用于潜艇的惟一导航设备就是惯性导航系统。惯性导航完全是依靠运载体自身设备独立自主地进行导航,不依赖外部信息,具有隐蔽性好、工作不受气象条件和人为干扰影响的优点,而且精度高。对于远程巡航导弹,惯性制导系统加上地图匹配技术或其他制导技术,可保证它飞越几千千米之后仍能以很高的精度击中目标。
现代惯性导航技术在各国政府雄厚资金的支持下,己经从最初的军事应用渗透到民用领域。惯性导航技术已经逐步推广到航天、航空、航海、石油开发、大地测量、海洋调查、地质钻控、机器人技术和铁路等领域,随着新型惯性敏感器件的出现,惯性导航技术在汽车工业、医疗电子设备中都得到了应用。因此,惯性导航技术不仅在国防现代化中占有十分重要的地位,在国民经济各个领域中也日益显示出它的巨大作用。
惯性导航系统属于推算导航方式,即从一已知点的位置根据连续测得的运动体航向角和速度推算出其下一点的位置,因而可连续测出运动体的当前位置。惯性导航系统中的陀螺仪用来形成一个导航坐标系,使加速度计的测量轴稳定在该坐标系中,并给出航向和姿态角;用加速度计(惯性敏感元件)测量出运动载体在北向、东向和重力向的三个加速度,经过积分器的一次积分,求得上述三向的三个速度,进而由另一种积分器积分成为三个坐标分量,再经过坐标变换,而获得运动载体的实用点位坐标和姿态(如图2所示)。
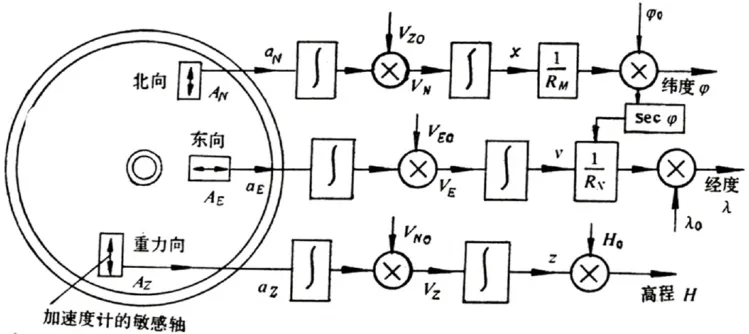
图2 惯性导航的三维坐标测定
当惯性导航系统按照地球橢球体面的曲率沿测线运行时,惯性平台上的北向、东向和重力向的三个加速度计,分别测得在这三个方向上的载体加速度aNaEaZ,经过一次积分得到它们的相应速度是:

式中,VN0VE0VZ0分别为北向、东向和重力向的载体初始速度,对这三个方向的速度再进行积分就能够求得载体的位移距离xyz;依据载体初始进动点的已知坐标λ0、φ0、H0,以及地球橢球面的子午圈曲率半径RM和卯酉圈曲率半径RN,进而求得载体在t时刻的经度、纬度和高程分别是:

从式(2)可知,载体初始进动点的已知坐标λ0、φ0、H0的测定误差(mφ0mλ0mH0),直接影响载体的三维位置测量精度,因此,应该尽量减小mφ0mλ0mH0值,以此提高载体三维位置测量精度。
由上述可见,惯性导航不需要依赖外界信息,就能够独立自主地给出运动载体的位置、速度和姿态参数,而具有抗电磁辐射干扰、大机动飞行和隐蔽性好的特点。但是,它所测定的点位坐标等导航参数误差随时间增长而增大,不适合长时间的导航应用。卫星导航所测定的点位坐标等导航参数,不仅精度高,而且误差不随时间长短而变化,因此,以卫星导航之长、克服惯性导航之短的GPS/INS组合导航系统,就成为国内外的一个热门研发项目,现已在海空天的运动载体上获得了较多的工程实用。例如,美军的BGM-109C“战斧”巡航导弹,当用惯性加地形匹配制导时,它的圆概率误差仅为9m左右,在它的惯性加地形匹配制导系统中加入GPS技术之后,它的圆概率误差降低到3m,显著提高了“战斧”巡航导弹的制导精度,进而增强了它的杀伤力。
捷联式惯性导航系统(Strap-down Inertial Navigation System,SINS)是将加速度计和陀螺仪直接安装在载体上,在计算机中实时计算姿态矩阵,即计算出载体坐标系与导航坐标系之间的关系,从而把载体坐标系的加速度计信息转换为导航坐标系下的信息,然后进行导航计算。由于具有可靠性高、功能强、重量轻、成本低、精度高以及使用灵活等优点,使得SINS成为当今惯性导航系统发展的主流。捷联惯性测量组件(Inertial Measurement Unit,IMU)是惯导系统的核心组件,IMU输出信息的精度在很大程度上决定了系统的精度。陀螺仪和加速度计是惯性导航系统中不可缺少的核心测量器件,现代高精度的惯性导航系统对所采用的陀螺仪和加速度计提出了很高的要求,因为陀螺仪的漂移误差和加速度计的零位偏值是影响惯导系统精度的最直接的和最重要的因素,因此如何改善惯性器件的性能,提高惯性组件的测量精度,特别是陀螺仪的测量精度,一直是惯性导航领域研究的重点。
陀螺仪的发展经历了几个阶段:最初的滚珠轴承式陀螺漂移速率为(l-2)°/h,通过攻克惯性仪表支撑技术而发展起来的气浮、液浮和磁浮陀螺仪,其精度可以达到0.001°/h,而静电支撑陀螺的精度可优于0.0001°/h。从20世纪60年代开始,挠性陀螺的研制工作开始起步,其漂移精度优于0.05°/h量级,最好的水平可以达到0.001°/h。1961年激光陀螺首次研制成功,标志着光学陀螺开始主宰陀螺市场。目前激光陀螺的零偏稳定性最高可达0.0005°/h,激光陀螺面临的最大问题是其制造工艺比较复杂,因而造成成本偏高,同时其体积和重量也偏大,这一方面在一定程度上限制了其在某些领域的发展应用,另一方面也促使激光陀螺向低成本、小型化以及三轴整体式方向发展。而另一种光学陀螺-光纤陀螺不但具有激光陀螺的很多优点,而且还具有制造工艺简单、成本低和重量轻等特点,目前正成为发展最快的一种光学陀螺。
2 原子惯性导航技术即将问世
2010年开始,美国国防高级研究计划局(Defense Advanced Research Projects Agency, DARPA)开展了不依赖卫星的导航系统的研发工作,目的在于全面替代GPS卫星导航,而不是作为GPS系统的补充。成立于1958年的美国国防高级研究计划局,是美国国防部属下的一个行政机构,负责研发军事用途的高新科技。目前,该局联合美国密歇根大学的研究人员已经研制出了一种不依赖卫星的新型导航系统,它被集成在一个仅有8立方毫米的芯片上,芯片中集成有3个微米级的陀螺仪、加速器和原子钟,它们共同构成了一个不依赖外界信息的自主导航系统。这名项目主管还称,按计划,这种新一代的导航系统将会首先被用于小口径弹药制导、重点人员监控,以及水下武器平台等GPS应用触及不到的领域。
美军所谓的新一代导航系统其实质是一种基于现代原子物理最新技术成就的微型惯性导航系统。惯性导航系统是人类最早发明的导航系统之一,早在1942年德国在V-2火箭上就首先应用了惯性导航技术。而美国国防部高级研究计划局新一代导航系统主要通过集成在微型芯片上的原子陀螺仪、加速器和原子钟精确测量载体平台相对惯性空间的角速率和加速度信息,利用牛顿运动定律自动计算出载体平台的瞬时速度、位置信息并为载体提供精确的授时服务。有资料显示,2003年美国国防部就斥资千万美元开始对原子惯性导航技术的研制。该技术一旦研制成功,将会使惯性导航达到前所未有的精度。具体来说,将会比目前最精准的军用惯性导航的精度还要高出100到1,000倍,而这将会对军用定位、导航领域带来革命性影响。由于该导航系统具有体积小、成本低、精度高、不依赖外界信息、不向外界辐射能量、抗干扰能力极强、隐蔽性好等特点,很有可能成为GPS技术的替代者。依笔者之见,原子惯性导航技术的成功实现,对于海陆空的军用,确实能够产生革命性的变化,但是,原子惯性导航难以在下列器件上取代GPS:戴在人们头上的GPS眼镜、穿在人们脚上的GPS鞋、握在人们手中的GPS照相机和陪伴人们行走的GPS手机,老人和小学生随身所带的GPS跟踪器,成为他们安全行踪的“守护者”,及时告知他们所在位置。因此,原子惯性导航技术只能够大幅度地压缩GNSS卫星导航的应用空间,取代GNSS在海陆空军用设备上的应用。
