基于RS-485总线的采掘设备监测系统设计*
2020-08-28程凤霞
程凤霞
(中国煤炭科工集团 太原研究院有限公司,山西 太原 030006)
0 引言
随着科学技术的发展,越来越多的传感器不断涌现,并越来越多地应用在煤矿采掘设备的电气控制系统设计中,为提高煤矿设备的智能化水平提供了强有力的硬件支撑。为了适应不同输出信号的传感器参数采集,整个电气控制系统也变得越来越庞大,内外部线缆越来越繁杂,随即增加了系统工作的故障点,给整个系统工作的稳定性带来了不利的影响。针对煤机设备技术发展过程中出现的这一问题,设计了一套信息采集、显示、存储系统,既简化了整个系统的结构,又进一步促进了煤机设备向智能化、数字化、绿色化的方向转型,为实现无人化、机械化施工打下了坚实的基础[1-2]。
1 监测系统
1.1 系统组成
监测系统由主控制单元、数据采集单元、防爆显示器和多个传感器组成[3-4],如图1所示。该系统中有甲烷、压力、温度、液位、水流、风流、风速等不同类型的传感器,其输出信号多种多样,涵盖了电阻、电流、电压、脉冲、开关量、Modbus RTU等大多数通用的输出信号类型。数据采集单元可实现对不同输出信号的多个传感器信息的采集,与主控PLC之间根据Modbus RTU协议通过RS-485总线通信。显示单元与PLC之间根据Modbus TCP协议通过RJ45网络接口通信,在显示界面直观显示监测系统的各参数信息。
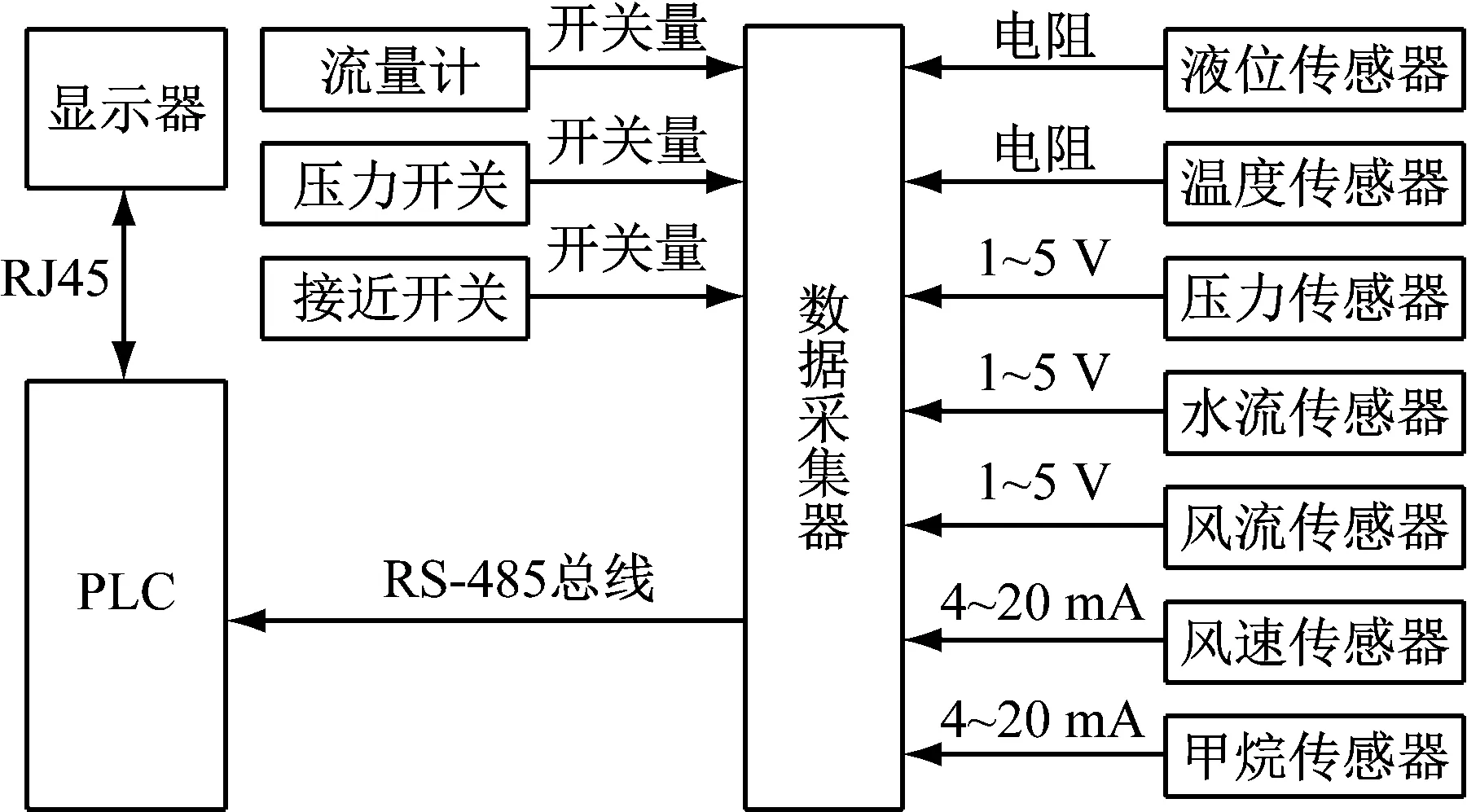
图1 监测系统原理
1.2 系统原理
由图1看出,单个数据采集器可以实现对8路信号的采集。监测系统可根据所需监测参数的多少,自由配置数据采集器,组建系统的数据采集网络。RS-485总线式信号可有效减少PLC的AI、I/O使用点数,简化主控单元的结构。因此,该监测系统采用多路信号的输入及1路Modbus RTU信号的输出,可实现基于多个信号的复杂监控系统的运行。
2 总线设计
2.1 Modbus RTU总线
主控制器与数据采集器通过RS-485总线连接[5-7],如图2所示。主控制器与数据采集器通过Modbus RTU协议通信,主控制器作为Modbus主站,数据采集器作为Modbus从站。各数据采集器作为从站节点串接入RS-485总线网络中,终端匹配120 Ω的终端电阻。为了保障通信的稳定,选用屏蔽双绞线作为传输介质,并将屏蔽线单点接地来抑制共模干扰。由于系统复杂,结构庞大,有的数据采集器分布较远,偶尔会出现通信中断的现象,故系统网络设计时接入RS-485中继器,延伸了网络的通信距离,增强了信号的强度,同时也增强了RS-485系统网络的抗干扰能力。
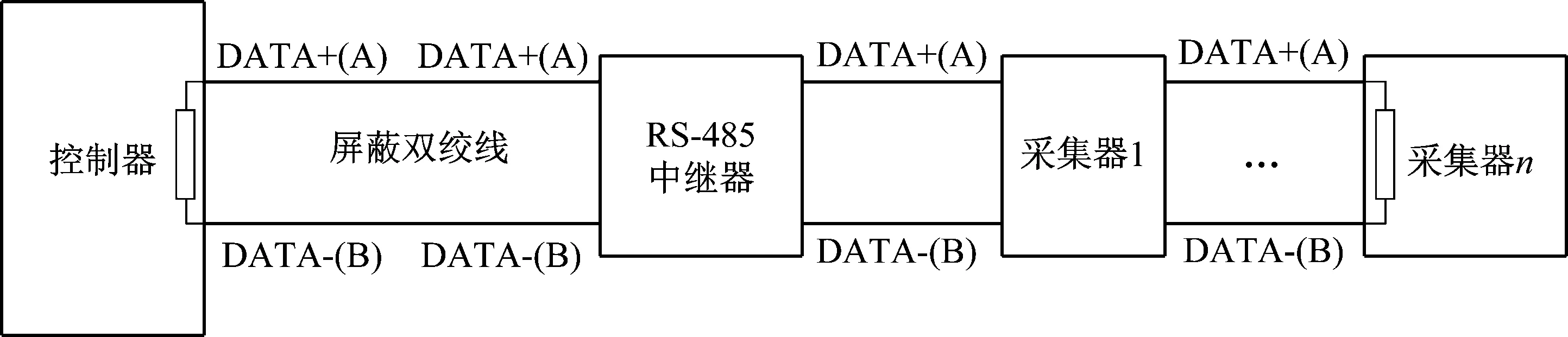
图2 控制器与多个数据采集器电气连接示意图
2.2 Modbus TCP总线
主控制器通过RJ45接口与显示器连接,主控制器与显示器之间采用Modbus TCP协议通信。Modbus TCP协议是 Modbus协议的一种表现形式。将Modbus RTU帧以一种简单方式嵌入到TCP帧中,使其成为工业以太网应用层协议,实现对采煤设备运行状态等数据的上传。设计中,主控制器作为从站功能的Server端,显示器作为主站功能的Client端。
3 TwinCAT软件设计
TwinCAT是由德国BeckHoff公司开发的基于PC平台和Windows操作系统的控制软件,是以 IEC 61131—3国际标准为基础设计的工业化自动控制系统的软件,能把工业PC或嵌入式PC变成一个功能强大的PLC或Motion Controller控制生产设备。TwinCAT是一套纯软件的控制器,完全利用PC标配的硬件实现逻辑控制和运动控制。
3.1 初始化
利用TwinCAT软件编写系统控制程序前,必须要进行一些参数的设置:
1) 根据所选用的控制器具体型号,在软件设置中选择目标系统类型,如在该项目设计中使用CX8050控制器,对应目标系统类型为CX(ARM)。
2) 根据控制参数在系统控制中的重要程度,在不同的任务中,每个项目最多可设4个任务,每个任务单独设定循环时间,时间越短,优先级越高。本项目设计中数据采集单元采集的参数信息为关键,参数能否实时地被采集到直接决定了系统控制实时性是否满足,故将采集参数的RS-485通信程序设定为高优先级,系统控制及显示等相关程序设定为次高优先级。
3) 为确保通信正常,必须就串行端口工作方式、通信速率及数据帧格式等内容对通信接口进行正确配置。本项目基于RS-485接口的Modbus RTU通信参数设定如表1所示。
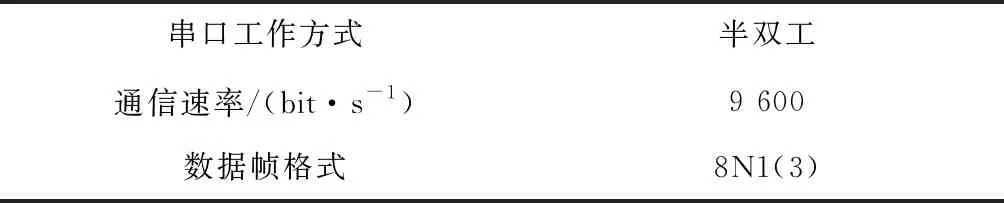
表1 通信参数设定
4) 自定义变量、定义通信功能模块而自动生成的通信变量与Process Data之间建立正确的映射。
3.2 数据采集及PLC RS-485总线通信
各传感器信号被数据采集器采集后,将采集数据放置到采集器CPU的数据缓冲区。数据采集器执行BeckHoff PLC的指令将数据发给PLC。PLC再把数据放到定义的内存地址中,定义全局变量名,从而方便程序调用。
由于采掘设备的系统复杂,监测监控点数很多,需对数据采集器设置不同的ID,通过Modbus RTU协议与BeckHoff PLC进行通信。BeckHoff PLC作为RS-485通信的主站,调用TwinCAT自带库文件中的串行总线端子Modbus RTU主站功能块,从而方便基于Modbus RTU协议的通信程序的编写。
功能块函数MODBUSRTUMASTER_KL6X22B功能模块结构如图3所示。此功能块可实现主站对从站的信息读写双向操作,而该系统程序设计中只涉及到对数据采集从站数据的读取,不对从站进行写数据操作。编写程序过程中,功能块对Modbus RTU通信主站BeckHoff PLC、各数据采集器通信从站进行相应的设置,包括数据采集器从站的地址,从数据采集器从站读取的系列数据的起始存放地址、读取数据字的多少,数据被读取后在PLC中存放地址,功能块启动读取功能的控制位,从站通信超时时间等。功能块被执行后,输出一系列变量,用以判断Modbus RTU通信的当前状态。
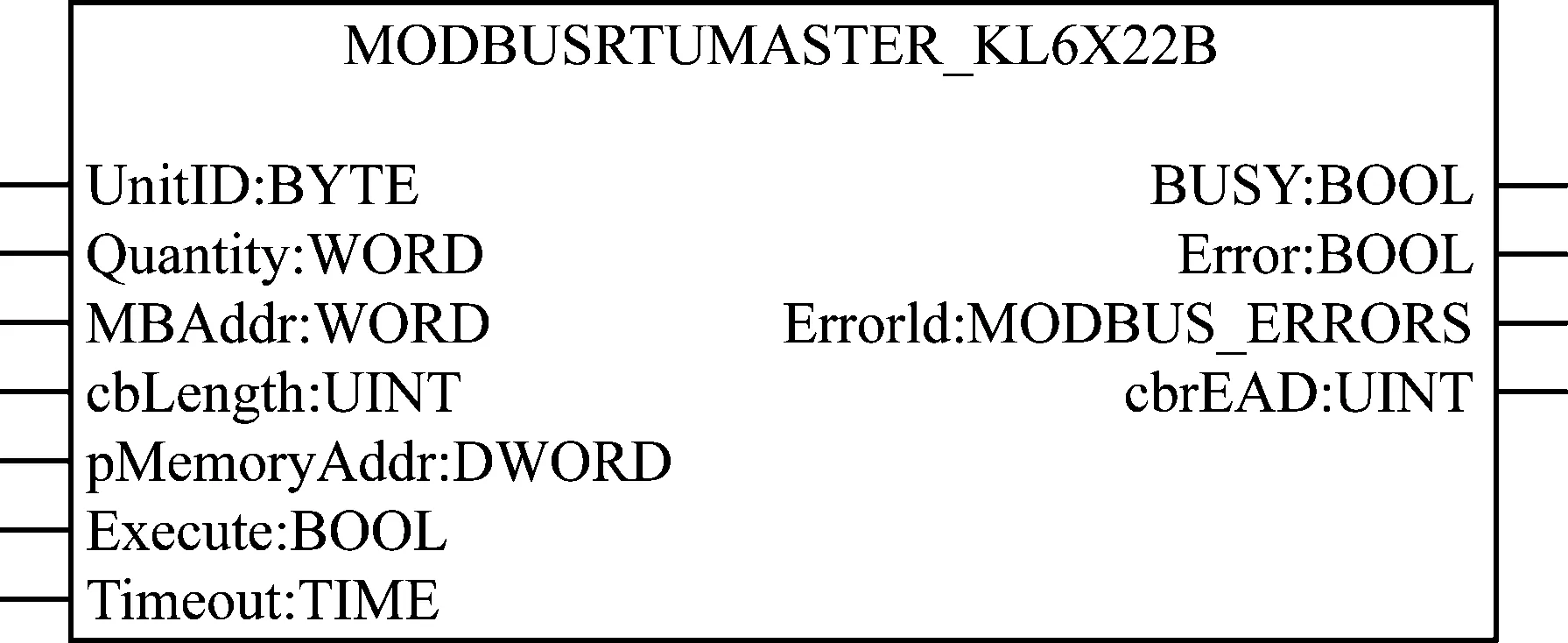
图3 ModbusRTU主站功能模块
3.3 信号处理
BeckHoff PLC从数据采集器取得各传感器的数据信息后,需在程序中对各数据进行线性化处理,以得到各传感器的实时参数值。
自定义模拟量采集功能块:AI_TRAN_V01_WORD。该功能块对传感器输出的电流信号(4~20 mA、0~20 mA)、电压信号(0~5 V、1~5 V、0~10 V、2~10 V)进行线性变换。为了得到更准确的传感器参数值,在功能块中对采集到的传感信号进行了软件滤波处理,即对计算结果取平均值,提高系统的控制精度。模拟量采集功能模块如图4所示。
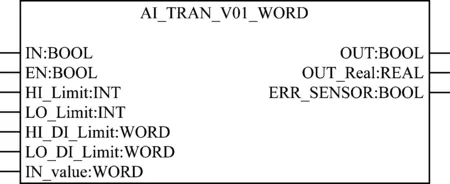
图4 模拟量采集功能模块
4 显示器软件设计
选用台达公司的DOP_B Series系列产品DOP-B07E515显示器,其具有高速的硬件架构,功能强大且品质稳定,支持多种控制器的多种通信方式。此系统中通过RJ45接口与PLC以Modbus TCP/IP协议进行通信。
显示器软件编写包括了模块参数的设置、通讯参数的设定、报警信息的设置、Clock宏命令的编写。显示界面根据需求划分为多个画面:参数设定界面、各传感器参数当前数值显示界面、传感器状态及通信状态显示界面、报警信息显示界面。自复位按钮实现各显示界面之间的切换。
显示器软件设计了对多个系统参数的修改功能,如报警限值、通信速率、截割整定值、电机启动报警时间、过载报警时间等。修改后的最新参数传输给PLC并存入永久存储区中,按照最新设定的参数对系统进行控制,方便在系统调试、工业性试验中对系统进行优化设计。
历史缓冲区设置需要断电保持的信息地址,历史数据可存储在外置的大容量的U盘或SD卡中,实现大量数据的半年或更长时间的存储。历史数据存储功能,可清楚地了解故障的发生点与发生时间,为事故分析处理、系统功能改进提供了便利。
5 结论
1) 本文简述了采掘设备信息监测系统的构成,明确了多信号采集单元与PLC的通信方式、显示器与PLC的通信方式。以基于IEC61131-3的软件平台TwinCAT为核心,详细介绍了系统软件的编写。基于DOP-B07E515显示器开发了监测系统的监控界面,实现了历史数据大量长期存储、系统参数便捷设置及掉电存储。
2) 应用结果表明,该信息监测系统在很大程度上解决了多个传感信号采集时线路繁杂、系统结构庞大的问题,具有较高的实时性、稳定性及工作效率。
