轻微型无人机电动力系统动力学模型建立
2020-08-26安斯奇刘晓锋侯宽新徐星辰
安斯奇 刘晓锋 侯宽新 徐星辰


摘 要:针对数字电子调速器、无刷直流电动机和定距螺旋桨组成的典型轻微型无人机的电动力系统,以推导和辨识的方法建立动力学模型。首先,结合组成部件的输入输出特性,考虑到轻微型无人机的低速工况,以部件级推导方法建立的电动力系统动力学模型由线性项和非线性项混合组成。其次,给出轻微型无人机电动力系统的动力学模型参数辨识方法。采用特制编码盘等惯量替代螺旋桨,使用动态响应结果辨识线性项参数,使用稳态关系辨识非线性项参数。最后,通过特制的地面测试台架,验证建模方法的正确性。
关键词:无人机;电动力系统;动力学建模;参数辨识;等惯量替代
DOI:10.15938/j.jhust.2020.03.006
中图分类号: TM331;V279
文献标志码: A
文章编号: 1007-2683(2020)03-0033-07
Abstract:Focused on UAV(unmanned aerial vehicle) equipped electric power plant composed by Electric speed controllers, brushless DC motors and fix-pitched propellers, a modeling method combined deduction with identification is studied. Firstly, in consideration of typical flight modes, the dynamic model of electric power was deduced based on component characteristics, and the model shows a nonlinear differential formula with a linear term and a nonlinear term. Secondly, an identification method is given. To avoid the aerodynamical nonlinear term, the propeller was replaced by a specialized disc-shaped coder with equivalent inertial moment, and the linear parameters were identified directly through output response. Afterwards, the nonlinear parameter was identified by static in-and output signals. Finally the method of dynamic modeling is proved to be effective on a ground test unit.
Keywords:unmanned aerial vehicle; electric power plant; dynamic modeling; parameter identification; equivalent replacement on inertial of moment
0 引 言
搭載在轻微型无人机上的动力系统决定了航空器的飞行性能,从而间接地影响和决定了载荷类型或标准,而一些重质、昂贵的应用性载荷受制于载具的动力缺陷,不能充分地发挥其作用[1]。其次,已经工业化生产的轻微型无人机的整体设计思路偏于简单和保守,飞行(动力)控制系统并不允许部件运行在性能包线的边缘附近,从而限制了部分极限性能,即以牺牲部分动力指标来换取系统的整体安全稳定。此外,保守的控制器设计,对经济性指标往往顾及乏力,使得动力装置的维护周期短、维修费用高以及航空器的续航时间短等成为民用无人机的短板。
通常而言,应用在轻微型无人机上的典型电动力系统包含3个部分[2-3]:功率输入部件、功率转化部件和功率输出部件。其中,电子调速器-直流电动机-空气螺旋桨(涵道风扇)是应用最为广泛的动力系统,这几种部件的高度产业化也保证了电动轻微型无人机的低成本。一方面,优化控制器的设计是优化无人机动力系统性能的一种有效途径,另一方面,动力系统的动力学模型可为控制器提供精确估算和预测参考基准。因此,建立和获得一个能实时表征真实动力系统的动力学模型显得尤为重要。
准确的动力学数字化模型是实现智能控制的基础。土耳其学者Krolu等[4]提出了一种基于直流无刷电动机-定距螺旋桨的动态建模方法,他们将其应用在针对电池压降的讨论之中,并且在模型的辨识方面上应用了神经网络。而Ahsun等[5]则在其文章中引入了针对固定翼无人机动力系统的推力系数和功率系数,并提出螺旋桨进阶比例参数的概念,他们指出推力系数和功率系数均是螺旋桨比例参数、螺旋桨外形尺寸参数以及雷诺数的函数。Bouabdallah等[6]在其研究四轴旋翼飞行器的文章中完整地搭建了直流电动机-减速箱-定距螺旋桨的非线性动力模型,并提出了基于悬停转速的状态点进行线性化的思路。但是出于研究目的不同,他们并没有尝试对该非线性模型进行参数辨识。同样地,我国台湾学者Yang和Chou[7]也建立了直流电动机-减速箱-定距螺旋桨的非线性动力模型,为了更真实的还原动力系统的运行过程和工作状态,考虑到电池供电的压降和地面效应的影响,只是为了在模拟软件中复现动力系统,并没有对非线性模型进行参数辨识。波兰学者Szafranski等[8]考虑到电动力系统非线性以及电池供电特性的实际问题,以基于实验测试和经验参数的方式,建立、拟合并辨识了多输入多输出的线性系统,但仍然没有采用直接的方法。
无人机电动力系统由于螺旋桨空气动力和电动机电枢电感等因素,具有一定的非线性性质,常规的线性系统辨识法难以适用,而类如神经网络辨识法、卡尔曼滤波辨识法和递归最小二乘法(recursive least square, RLS)等方法辨识参数有一定的准确性[9-12],但辨识难度高,过程复杂,对于无人机电动力系统设计帮助有限。
根据以上分析,考虑到工程实践的可行性,基于动力学理论框架,针对典型轻微型无人机电动力系统(电子调速器-直流电动机-空气螺旋桨),提出一种实用性较强的部件法建模方法和一种借助试验的系统参数辨识方法,对某型动力系统使用本文提出方法获得完整动力学模型,并在实物上进行对比和验证。
1 电动力系统的动力学模型
1.1 电动机-电子调速器的动力学模型
典型轻微型无人机电动力系统采用小型直流电动机作为功率输出装置,该类型电动机输出轴不加负载的动态模型可用两个方程,即电势平衡方程和转矩平衡方程来描述[13-14]。电机的相关参数及意义参阅表1。
其中:ω为电机转速;R0为电机绕组电枢电阻;L为电枢电感;ke为电机反电动势常数;kT为电机绕组转矩常数;η为转子阻尼常数;J1为转子转动惯量。
电动机由输入为脉宽调制方波信号(pulse width modulation,PWM,或称该类型信号值为占空比)的专用数字电子调速器(驱动模块)控制[15],信号值与电动机输入电压值为比例关系,那么电机输入端可写成:
综合式(1)~(3)可得不加轴端负载的电子调速器+直流电动机的动态动力学模型,其中输入是占空比信号值Pc,输出是轴角速度ω:
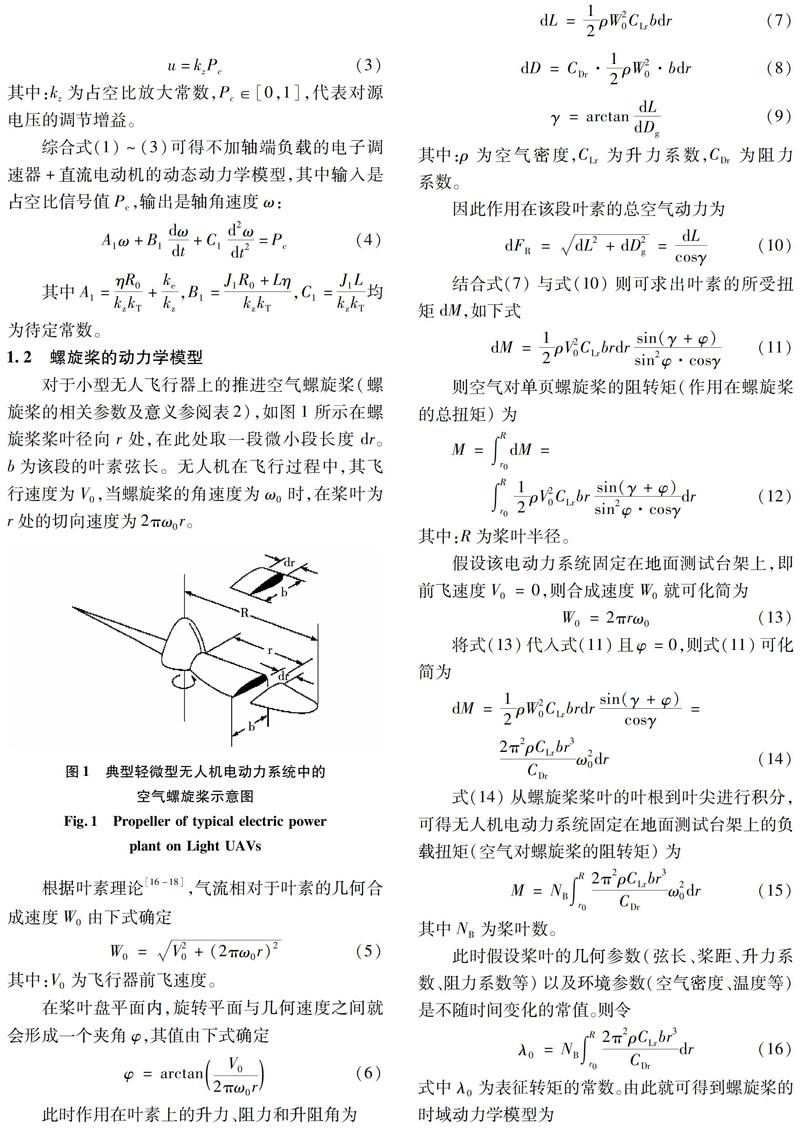
1.2 螺旋桨的动力学模型
对于小型无人飞行器上的推进空气螺旋桨(螺旋桨的相关参数及意义参阅表2),如图1所示在螺旋桨桨叶径向r处,在此处取一段微小段长度dr。b为该段的叶素弦长。无人机在飞行过程中,其飞行速度为V0,当螺旋桨的角速度为ω0时,在桨叶为r处的切向速度为2πω0r。
假设该电动力系统固定在地面测试台架上,即前飞速度V0=0,则合成速度W0就可化简为
式(14)从螺旋桨桨叶的叶根到叶尖进行积分,可得无人机电动力系统固定在地面测试台架上的负载扭矩(空气对螺旋桨的阻转矩)为
此时假设桨叶的几何参数(弦长、桨距、升力系数、阻力系数等)以及环境参数(空气密度、温度等)是不随时间变化的常值。则令
式中0为表征转矩的常数。由此就可得到螺旋桨的时域动力学模型为
式(17)表示只要空气螺旋桨具有角速度ω0,空气就会形成对螺旋桨的阻转矩。
1.3 电动力系统的简化动力学模型
当直流电动机直接驱动负载螺旋桨时,式可变为
式中的J2为系统转子(包含电动机转子、联轴器和螺旋桨等旋转部件)的转动惯量。
电机与螺旋桨之间无减速器,即ω0=ω,将式(18)、式(17)和式(1)联立消去中间变量就可推导出输入为占空比信号,输出为空气螺旋桨转动角速度的电动无人机动力系统时域动力学模型
式(19)为带混合项的非线性动力学模型,针对此类连续可导的非线性模型,可用多项式逼近或神经网络迭代优化的方式进行建模和辨识[19,20]。但此类方法工作量较大,并不适用于轻微型无人机电动力系统的设计过程。
对于轻微型无人机常用的微型直流电动机,可忽略电枢的电感L,此时电动无人机动力系统动力学模型(式)可以化简为
由此可见,简化后的轻微型无人机电动力系统的动力学模型是一个不带混合项的非线性系统。
2 电动力系统辨识方法与结果
2.1 螺旋桨的等惯量替换
观察式(20)发现,安装于地面固定测试台架上(如图2所示)的典型轻微型无人机的动力系统动力学模型(占空比信号-螺旋桨转动角速度),由一阶线性项和多项式非线性项组成,其中一阶线性项代表了电动机的励磁惯性与转子转动惯量,而多项式非线性项则代表了气动特性。此时假设用一个不具备气动特性的转动部件代替螺旋桨,组成电子调速器-电动机-转动部件的替代组合,并使得该转動部件具备与螺旋桨相同的转动惯量。那么式变成一个线性系统:
假设螺旋桨如图3(a)所示,其具有均匀密度ρp,厚度固定为δp,桨叶数为Np,弦长为f(r)且桨叶无扭曲,基于叶素从叶根到叶尖进行积分,螺旋桨的转动惯量近似为
考虑到便于传感测量轴角速度,设计并使用3D打印机制作一个合适的编码盘作为该转动部件,如图3(b)所示。其中缺口宽度为P,深度为Q,添加中心补偿圆柱使其转动惯量等于均布在圆周的所有缺口部分转动惯量之和。编码盘厚度为δc,均匀密度为ρc。
其中,Nc为均布缺口的个数,rx和δx为中心圆柱的半径和厚度。
某型电动力系统包含一副10×4.7inch规格双叶螺旋桨,由式、式和式,设计ABS材质的8缺口编码盘外径为0.071m。如图2所示,在地面测试台上安装某型电动力系统,使用光电传感器读取编码器或螺旋桨的转速,并换算至轴角速度。
2.2 系统参数的辨识
由式可知,电子调速器-电动机-编码盘的替代组合是一个一阶惯性系统
对于一阶惯性环节的参数辨识,有两种常见方法。其一是为实物系统(如图2所示)输入一个阶跃信号,以尽可能高的采样率采集角速度数据,将惯性环节的系统增益以及时间常数从转速响应曲线中直接求出即可。如图4所示,“real speed”指的是动力装置实测编码盘转速响应,单位为r/s。其二是使用MATLAB中的系统辨识工具箱,同样为实物系统输入阶跃信号,导入转速响应的数据,便能得出系统的时间常数和系统增益。
自此系统中线性项常数已知,卸装编码盘并重新安装螺旋桨,为系统输入定常占空比信号使系统转子轴角速度达到某个稳态,式(20)可变为
其中系统输入Pc为占空比信号值,输出ω为轴角速度(或螺旋桨旋转角速度)。
同时给予图2所示实物系统和动力学模型相同的输入信号(阶跃信号和正弦信号),得到的实际系统转速响应和动力学模型仿真转速响应如图5所示,其中“model speed”指的是非线性系统输出转速响应,“real speed”指的是动力装置实测螺旋桨转速响应,单位均为r/s。对比发现两个曲线重合度较高,说明辨识方法具有较好效果。
考虑到在工程实践中的简便性和实用性,螺旋桨建模所采用的叶素理论将螺旋桨视为径向扭转的机翼,而未考虑到气流的径向流动和下洗作用。电机建模时忽略了电感,没有计入由电流变化造成的延迟。由图5可以看出,在同一输入信号的激励下,由于螺旋桨和电机建模的不精确,动力学模型的转速响应与实物系统的响应曲线存在一定差异。因此在以后的研究工作中,将逐步改进部件理论建模,并设计更高精度的辨识方法,提高动力学模型的准确度。
3 结 论
提出了一种电动力系统的动力学模型建立方法。首先,使用部件级动力学建模方法,针对输入为占空比信号,输出为轴角速度(或换算转速)的典型轻微型无人机电动力系统,建立由一个一阶惯性环节和一个带二次幂非线性环节组成的非线性时域动力学模型。其次,创新地设计和使用相等转动惯量的编码盘代替具有非线性气动性的螺旋桨,使得系统转子成为等效的一阶惯性环节,因此避开非线性项,可直接辨识线性部分的微分项系数。最后,采用稳态输入信号和输出响应辨识非线性环节参数。通过在地面测试台和仿真软件上分别给予相同输入信号加以对比,模型仿真响应输出曲线和实物系统响应输出曲线重合度较高,证明所提建模方法是有效可行的。
由于篇幅所限,只讨论了定距螺旋桨。而螺旋桨的桨距变化能导致升力和阻力的变化,因此使得动力装置成为一个多输入多输出系统。而对多输入多输出系统进行解耦之后,所提出的部件法建模和参数辨识思路将同样适用于变距螺旋桨动力装置。
参 考 文 献:
[1] 陶于金, 李沛峰. 無人机系统发展与关键技术综述[J].航空制造技术, 2014(20):34.
TAO Yujin, LI Peifeng. Development and Key Technology of UAV[J]. Aeronautical Manufacturing Technology, 2014(20): 34.
[2] REZENDE R N, BARROS E, PEREZ V. General Aviation 2025-a Study for Electric Propulsion[C]// 2018 Joint Propulsion Conference, Indianapolis, 2018:4900.
[3] JAHN R G. Physics of Electric Propulsion[M]. New York: Courier Corporation, 2006.
[4] KROLU M T, NDER E. Experimental Modelling of Propulsion Transients of a Brushless DC Motor and Propeller Pair Under Limited Power Conditions: A Neural Network Based Approach[J]. IFAC Proceedings Volumes,2009,42(19):37.
[5] AHSUN U, BADAR T, TAHIR S, et al. Real-Time Identification of Propeller-Engine Parameters for Fixed Wing UAVS[J]. IFAC-Papers on Line, 2015, 48(28): 1082.
[6] BOUABDALLAH S, NOTH A, SIEGWART R. PID vs LQ Control Techniques Applied to an Indoor Micro Quadrotor[C]// Proc. of the IEEE International Conference on Intelligent Robots and Systems (IROS), Sendai,2004:2451.
[7] YANG S F, CHOU J H. A Mechatronic Positioning System Actuated Using a Micro DC-Motor-Driven Propeller-Thruster[J]. Mechatronics, 2009, 19(6): 912.
[8] SZAFRANSKI G, CZYBA R, BLACHUTA M. Modeling and Identification of Electric Propulsion System for Multirotor Unmanned Aerial Vehicle Design[C]// Unmanned Aircraft Systems (ICUAS), 2014 International Conference on IEEE, Orlando, 2014:470.
[9] PENG J, DUBAY R. Identification and Adaptive Neural Network Control of a DC Motor System with Dead-Zone Characteristics[J]. ISA Transactions, 2011, 50(4): 588.
[10]KRNETA R, ANTI S, STOJANOVI D. Recursive Least Squares Method in Parameters Identification of DC Motors Models[J]. FACTA Universitatis-Series: Electronics and Energetics, 2005, 18(3): 467.
[11]魏彤,郭蕊.自适应卡尔曼滤波在无刷直流电动机系统辨识中的应用[J].光学精密工程, 2012,20(10):2308.
WEI Tong, GUO Rui. Application of Kalman Filtering to System Identification of Brushless DC Motor[J]. Optics and Precision Engineering, 2012, 20(10): 2308.
[12]石建飛,戈宝军,吕艳玲,等. 永磁同步电机在线参数辨识方法研究[J].电机与控制学报,2018,22(3):17.
SHI Jianfei, GE Baojun, LV Yanling, et al. Research of Parameter Identification of Permanent Magnetsynchronous Motor on Line[J]. Electric Machines and Control, 2018, 22(3): 17.
[13]KRISHNAN R. Electric Motor Drives: Modeling, Analysis, and Control[M]. New Jersey: Prentice Hall, 2001.
[14]SAAB S S, KAED-BEY R A. Parameter Identification of a DC Motor: An Experimental Approach[C]// Electronics, Circuits and Systems, 2001.ICECS 2001, Malta, 2001(2):981.
[15]DERAFA L, MADANI T, BENALLEGUE A. Dynamic Modelling and Experimental Identification of Four Rotors Helicopter Parameters[C]// Industrial Technology, 2006. ICIT 2006. Bhubaneswar, 2006: 1834.
[16]BRISTEAU P J, MARTIN P, SALAN E, et al. The Role of Propeller Aerodynamics in the Model of a Quadrotor UAV[C]// Proceedings of the European Control Conference 2009, Budapest, Hungary, August 23-26, 2009:683.
[17]KUSHLEYEV A, MELLINGER D, KUMAR V. Towards a Swarm of Agile Micro Quadrotors[J]. Autonomous Robots, 2013, 35 (4): 287.
[18]RWIGEMA M K. Propeller Blade Element Momentum Theory with Vortex Wake Deflection[C]// Proceedings of the 27th Congress of the International Council of the Aeronautical Sciences, Nice, France, 2010: 19.
[19]CHEN H F. Pathwise Convergence of Recursive Identification Algorithms for Hammerstein Systems[J]. IEEE Transactions on Automatic Control, 2004, 49(10): 1641.
[20]范偉,林瑜阳,李钟慎.遗传算法优化的 BP 神经网络压电陶瓷蠕变预测[J].电机与控制学报,2018,22(7):91.
FAN Wei, LIN Yuyang, LI Zhongshen. Prediction Model of The Creep of Piezoceramic Based on BP Neural Network Optimized by Genetic Algorithm[J]. Electric Machines and Control, 2018, 22(7):91.
(编辑:温泽宇)
