力反馈控制型IRHD-M橡胶硬度计
2020-08-26吴向垒何广霖
吴向垒 何广霖
力反馈控制型IRHD-M橡胶硬度计
吴向垒1,2何广霖1,2
(1.广东省现代几何与力学计量技术重点实验室,广东 广州 510405 2.广东省计量科学研究院,广东 广州 510405)
根据橡胶硬度测定原理、测量过程、力和位移要求,以采用力反馈控制方式产生小试验力为目标,设计力反馈控制型IRHD-M橡胶硬度计。该硬度计结构简单,力值数据稳定,初试验力、总试验力和位移等参数满足国家规程。
力反馈控制;IRHD-M;橡胶硬度
0 引言
橡胶国际硬度测量采用静态压入法,通过测量不同试验力下的压入深度差,经查表获得相应的硬度值,其单位以IRHD-M表示[1]。影响橡胶国际硬度测量的主要因素包括试验力、球头尺寸和深度差。Bareiss公司橡胶硬度计采用多滚子轴承减少主轴和主实验力摩擦力;Wallace公司硬度计采用弹性支撑减少摩擦力。它们虽然都能满足国家标准要求,但在IRHD-M初试验力0.0083 N段,存在位移量小、稳定性差等问题。为此,本文设计磁力平衡传感器反馈控制型IRHD-M橡胶硬度计,应用于密封圈、超薄橡胶制品的硬度测量,与同类型硬度计相比,能够实时监控力值和位移深度差,具有更好的稳定性。
1 橡胶硬度测定原理
橡胶国际硬度测量方法执行GB/T 6031—2017/ ISO 48:2010《硫化橡胶或热塑性橡胶硬度的测定(10 IRHD ~100 IRHD)》标准。橡胶硬度测定的基本原理:首先,将直径为0.395 mm的钢性压头,先后在接触试验力0= 0.0083 N和总试验力= 0.1533 N(=0+1,1为压入试验力)作用下压入试样表面;然后,测量接触试验力0和总试验力作用下压入深度差10;最后,通过查表或直接读取硬度计相应的硬度值,其原理示意图如图1所示。

图1 橡胶硬度测定原理示意图
橡胶国际硬度测量过程中,需要同时保持试验力和测量位移深度,而试验力0= 0.0083 N(约0.83 g)小于压针自重。如何产生小于本身重力的试验力,是IRHD-M橡胶硬度计设计的难点。本文采用反馈方式解决上述难点。
2 硬度计开发
2.1 硬度计结构
力反馈控制型IRHD-M橡胶硬度计结构如图2所示,主要由机架部分、磁力平衡传感器和位移模块组成。
机架部分包括大理石底座、支撑竖杆、可调支撑梁等。可调支撑梁能够上下调节固定,可适应不同高度的测试样品。
磁力平衡传感器固定在大理石底座上,用于测量测试座上的作用力。测试座的侧面粘贴有反射式光栅带,被测样品(如密封圈)放在在测试座工作面上。
位移模块主要由滚珠丝杆电机、精密直线导轨、光栅尺等构成。光栅尺与光栅带共同构成位移测量模块,可测量测针与测试座之间的位移变化量。手动旋扭可使滚珠丝杆电机带动测针和光栅读数头上下运动。根据直线电机提供资料位移分度值可达0.1 μm[2],光栅尺的采样分度值为0.1 μm[3]。
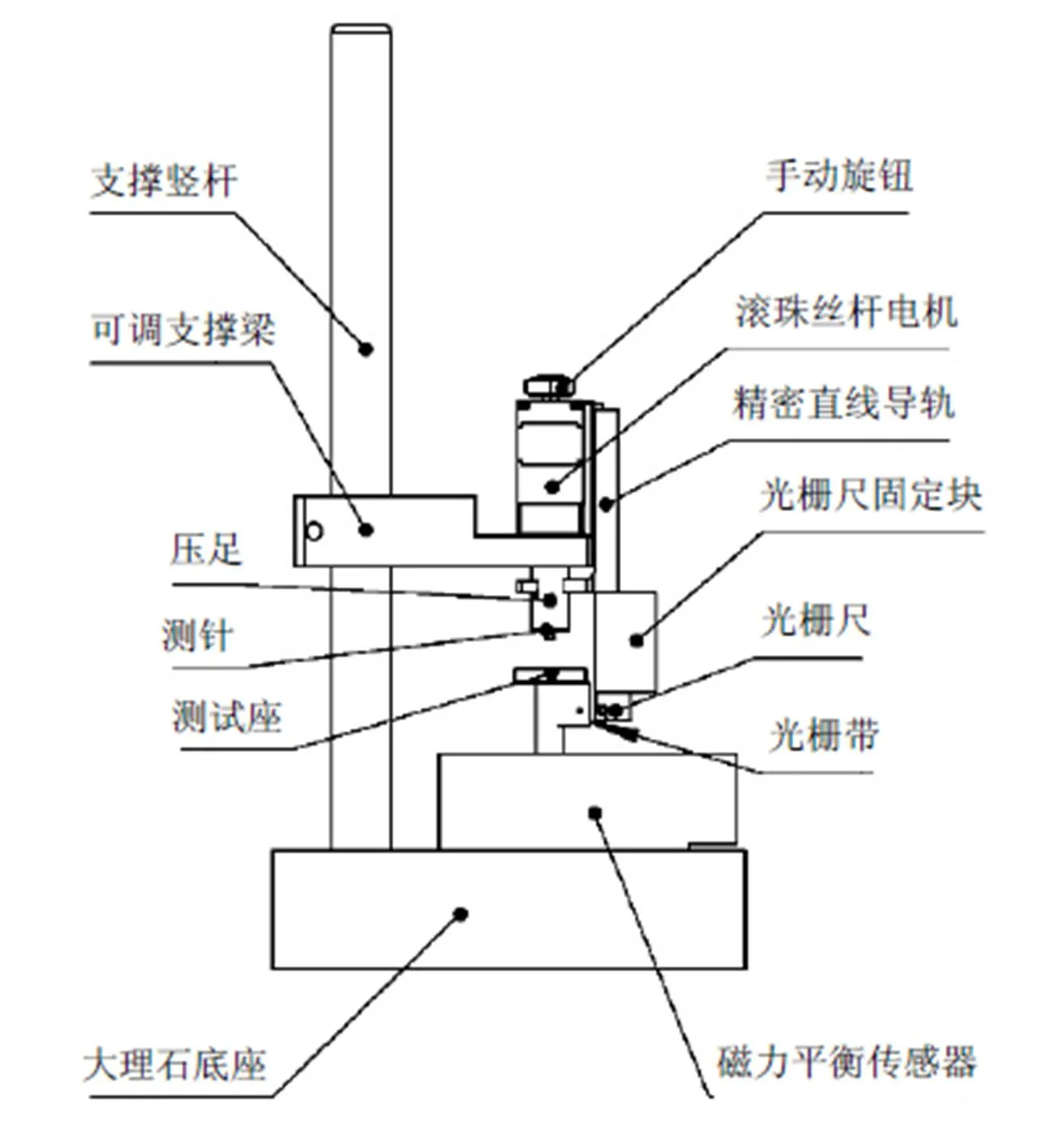
图2 力反馈控制型IRHD-M橡胶硬度计结构图
测量流程:首先,被测样品放置在测试座上,调整可调支撑梁位置使测针到样品上表面距离为5 mm,记录测试座作用力z;然后,控制滚珠丝杆电机匀速下降,实时采集作用力,并通过自动控制算法,保持初试验力−z= 0.0083 N ± 0.0005 N 5 s后,记录当前位移量1;接着,测针继续下降,并实时反馈磁力平衡传感器作用力,保持z= 0.1533 N ± 0.0010 N 30 s,获得位移量2,橡胶硬度=(2−1),−1为实时深度差;最后,通过查表或软件计算得到IRHD-M硬度值。
2.2 磁力平衡传感器
磁力平衡传感器工作原理:在量程范围内,作用力b传递到弹簧支撑的磁力线圈上,弹簧支撑具有很小的力重复性特点;作用力b变化导致磁力线圈位置变化,检测磁力线圈位置变化的光电开关输出一个偏移信号给前置放大器和PID控制系统;控制系统根据目标位置计算出磁力线圈需要的电流,并促使磁力线圈返回到原始位置,恢复平衡状态,表达式为
ab(1)
式中,为常数(与所用单位有关);为磁感应强度;为线圈长度;为通过线圈的电流强度。
由式(1)可知:磁力平衡传感器利用电磁力a与测量点作用力b相等的原理,磁场中流过线圈的电流与作用力b成正比,即可由电流推导出作用力b[4]。

2.3 IRHD-M位移和力值的校准方法
由于测针和光栅尺钢性连接,光栅测量精度标定时可用标定测针移动量方法实现。把第一个量块放置测针的下端,清零光栅尺读数;然后更换相差0.1 mm的第二个量块,再次读取光栅尺读数,即为光栅示值。标准值和光栅示值的偏差需小于国家规程。
由于磁力平衡传感器属于力传感器,可以采用0.01 N,0.02 N,0.05 N,0.10 N力值砝码进行标定,标定结果也应满足国家规程[6]。
3 结论
本文分析了IRHD橡胶硬度计和磁力平衡传感器原理,采用磁力平衡传感器作为小试验力反馈模块、光栅尺测量测试座和测针之间位移变化的方法,解决小试验力产生和精密位移测量等问题,具有能够实现实时测量输出试验力、确保测量结果准确性、力值稳定等特点。
[1] 全国橡胶与橡胶制品标准化技术委员会(SAC/TC 35). GB/T 6031—2017/ ISO 48:2010 硫化橡胶或热塑性橡胶硬度的测定(10 IRHD~100 IRHD)[S].北京:中国标准出版社, 2017.
[2] Oriental Motor.小型电动传动装置 DRL系列[M].日本:东方电机有限公司,2006.
[3] Renishaw, RGH24 data sheet L-9517-0166-07-A [M].英国, 2018.
[4] 丁英丽.一种新型的提高电磁力平衡传感器精度的方法[J].微计算机信息,2004,20(2):84-85.
[5] Sartorius, WZA224 data sheet Manual-WZA...-N-WWZ6008-e [M].德国,2016.
[6] 广东省技术监督局.JJG 898—1995 微型橡胶国际硬度计[S].北京:中国计量出版社,1995.
IRHD-M Rubber Hardness Tester Controlled by Force Feedback
Wu Xianglei1,2He Guanglin1,2
(1. Guangdong Provincial Key Laboratory of Modern Geometric and Mechanical Metrology Technology, Guangzhou 510405,China 2. Guangdong Institute of Metrology, Guangzhou 510405, China)
According to the principle of rubber hardness measurement, measurement process, force and displacement requirements, the force feedback control IRHD-M rubber hardness tester was designed to generate small test force by force feedback control. The machine is simple, the force data is stable, and the parameters of initial test force, total test force and displacement meet the national regulations.
force feedback control; IRHD-M; rubber hardness
吴向垒,男,1984年生,研究生,工程师,主要研究方向:橡胶硬度、精密仪器检测。E-mail: wuxianglei@foxmail.com
何广霖,男,1962年生,本科,高级工程师,主要研究方向:橡胶硬度、精密仪器检测。E-mail: levi200107@163.com
TG83
A
1674-2605(2020)04-0013-03
10.3969/j.issn.1674-2605.2020.04.013
