液压支架支护状态分类及感知原理研究
2020-08-25张德生魏训涛卞冀文治国李丁一杜尚宇
张德生, 魏训涛, 卞冀, 文治国, 李丁一, 杜尚宇
(1.天地科技股份有限公司 开采设计事业部, 北京 100013;2.中煤科工开采研究院有限公司, 北京 100013; 3.兖州煤业股份有限公司, 山东 邹城 273500; 4.中国煤炭科工集团唐山研究院有限公司, 河北 唐山 063012)
0 引言
智能化开采已成为煤炭工业高质量发展的重要方向[1],液压支架作为综采工作面的主要装备,其支护状态的精确识别是工作面自适应控制和协同推进的基础,对其支护状态的研究从传统的矿压观测向姿态监测等全工况发展,以提高工作面支护质量和自动化水平。
近年来,许多学者对液压支架支护状态进行了研究。文献[2]分析了大采高工作面液压支架倒架失稳因素,建立了液压支架的多体动力学模型。文献[3]研究了大倾角条件下支架稳定性分类并提出了相应改进和管理措施。文献[4]给出了大倾角综放工作面支架状态与工作面倾角的量化关系。文献[5-6]研究了两柱掩护式液压支架的承载特性。文献[7-8]给出了基于倾角的液压支架姿态解算方法。文献[9]开展了支护质量模糊综合评价工作。以上研究主要从几何稳定状态、承载特性等方面进行,单一的姿态测量无法全面反映液压支架的综合状态,无法实现液压支架支护状态的精确感知[10-13]。
本文以两柱掩护式液压支架为例,从空间几何和结构承载2个方面对液压支架支护状态进行分析,并提出关键参数的感知方法,为液压支架状态监测和稳定判别体系的构建提供理论依据。
1 液压支架空间几何状态分析
1.1 工作面液压支架三维空间布置
液压支架与围岩在工作面支护体系中构成“顶板-支架-底板”耦合系统,根据液压支架直接与顶、底板的接触,分为耦合和非耦合2种状态。耦合状态下支架与顶、底板接触并传递较大载荷,表现为承载失稳;非耦合状态下支架与顶板无接触,表现为几何失稳。
综采工作面液压支架的布置如图1(a)所示,正常情况下,液压支架沿煤层倾斜方向布置,沿走向方向推进,液压支架的位姿和稳定性受工作面倾角影响。
液压支架空间三维受力模型如图1(b)所示,顶梁承受顶板垂向载荷q和水平摩擦力μ2Q作用,底座集中载荷R和摩擦力μ1R及自身重力G作用。其中:Q为顶梁等效集中载荷(合力);μ1为支架底座与底板之间摩擦因数;μ2为支架顶梁与顶板摩擦因数;h为支架高度;G为液压支架重力;α为俯仰角(沿倾斜方向);θ为倾斜角(沿走向方向);p为液压支架底座在推进方向与底板的夹角。
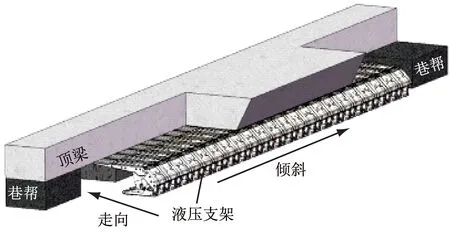
(a) 综采工作面液压支架布置
(b) 液压支架空间三维受力模型
1.2 液压支架几何稳定性分析
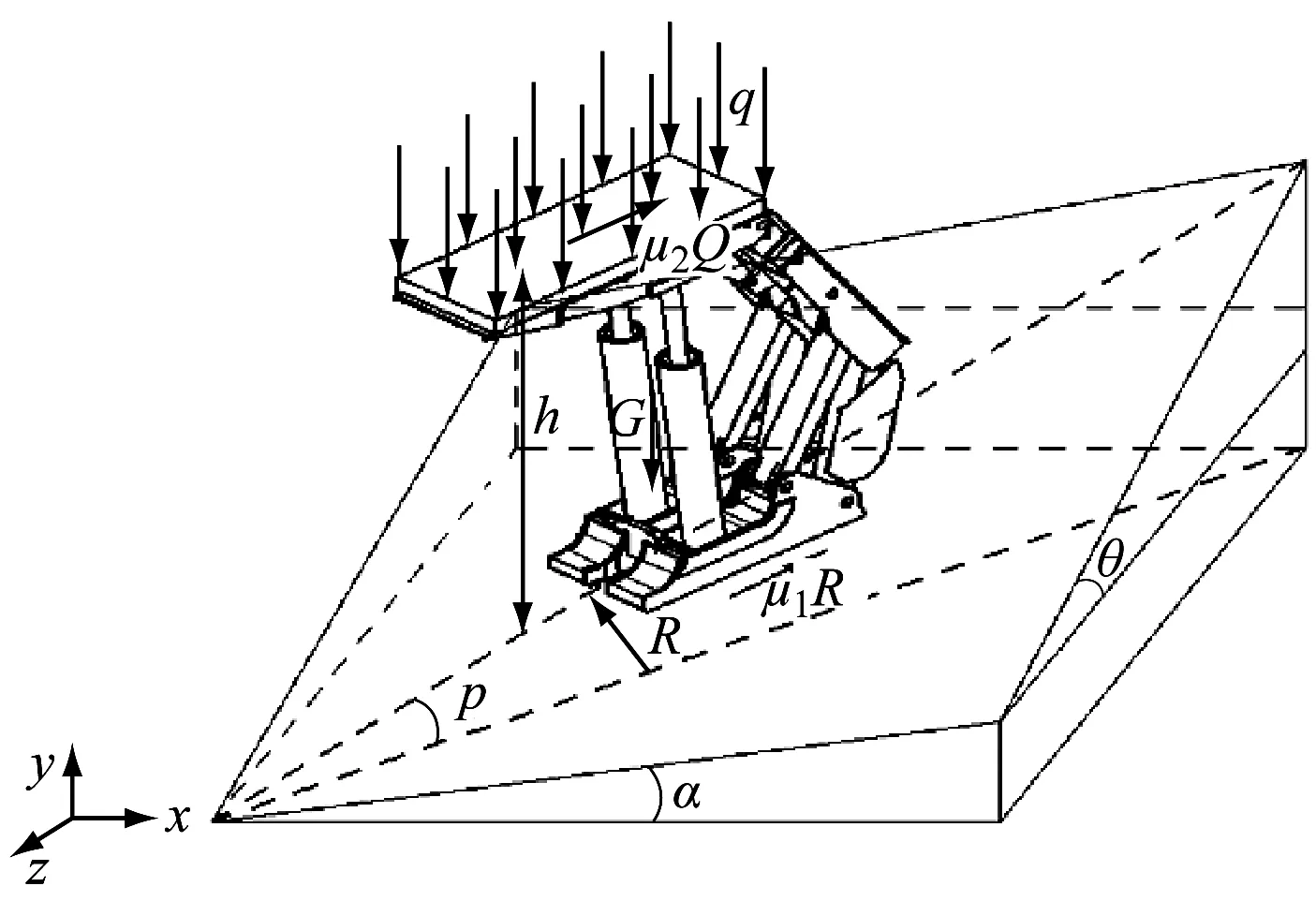
在工作面走向方向,液压支架主要表现为前翻和后仰两种失稳类型。不考虑液压支架移架过程发生的偏斜(p=α),液压支架后仰状态力学模型如图2所示。
失稳时以底座后端O1点为支点倾覆,因此,O1点取矩平衡方程组为
(1)
式中:LQO1,LGO1,LRO1分别为顶梁等效集中载荷Q、
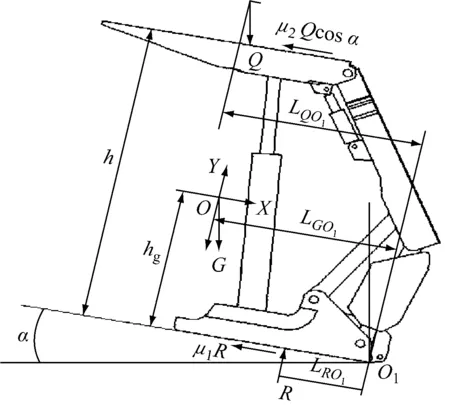
图2 液压支架后仰状态力学模型Fig.2 Mechanical model for backward fall of hydraulic support
重力G在支架垂向分量和底座集中载荷R到O1的力臂;hg为支架重心到底座的垂直距离。

(2)
液压支架前倾条件下的受力模型如图3所示。
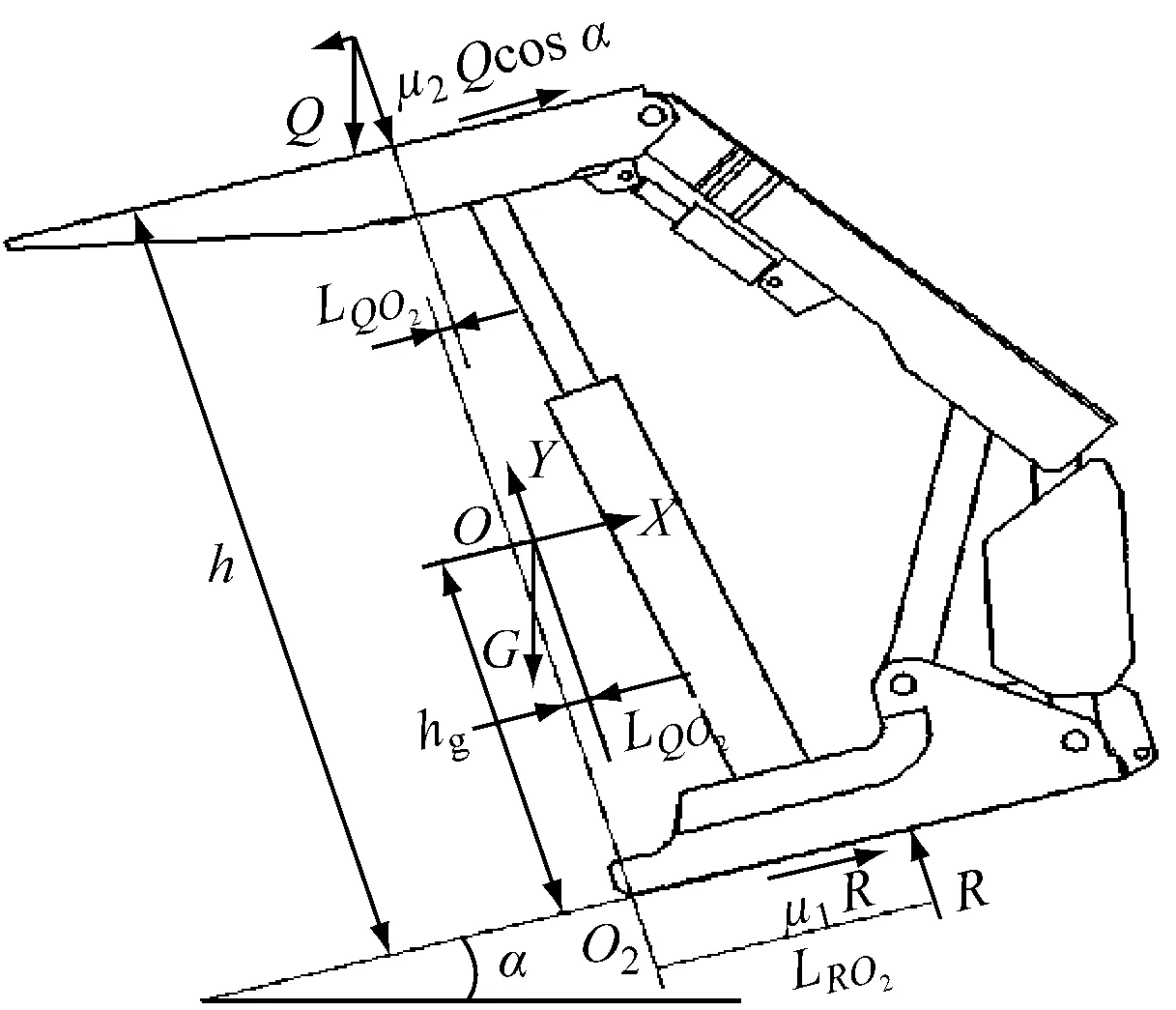
图3 液压支架前倾条件下的受力模型Fig.3 Mechanical model for forward fall of hydraulic support
失稳时以底座前端O2点为支点前翻,因此,O2点取矩平衡方程组为
(3)
式中LQO2,LGO2,LRO2分别为顶梁等效集中载荷Q、重力G在支架垂向分量和底座集中载荷R到O2的力臂。

(4)
在工作面倾斜方向,液压支架主要有下滑和侧翻2种失稳倾向,倾斜方向的受力模型如图4所示。

图4 液压支架倾斜方向受力模型Fig.4 Mechanical model of hydraulic support along incline directions
倒架时以底座一侧O点为支点发生倾翻,O点取矩平衡方程组为
(5)
式中:Tx,Ts分别为下邻架和上邻架液压支架的扶持作用力;f1为底座与底板在倾斜方向的摩擦因数;f2为顶梁与顶板在倾斜方向的摩擦因数;a,c,e分别为重力G、底座集中载荷R和顶梁等效集中载荷Q到O的力臂。

(6)
式中B为液压支架的底座宽度,B=2c。
液压支架失稳概率与hg呈正相关;增加支护设备与顶底板支架的摩擦因数可有效增大滑移临界倾角,从而有效防止支架的滑移失稳;q=0,液压支架最易发生失稳,带压移架可有效防止支架移架时的失稳。
1.3 液压支架重心确定方法
液压支架重心坐标是确定临界失稳角的直接条件,利用解析方法求取重心坐标变化。
根据文献[7]建立液压支架节点坐标图(图5),确定部件质心和节点的相对位置,用质心公式(式7)求取液压支架整体质心坐标(xG,yG)。
图5 两柱掩护式液压支架节点坐标Fig.5 Node coordinates of two column shield hydraulic support
(7)
式中:(xi,yi)为第i个部件的质心坐标;mi为第i个部件的质量;n为支架部件的数量。
以前连杆为例,确定节点D和节点E的位置坐标(xD,yD),(xE,yE),其中,γ1,γ2,γ3分别为底座、前连杆及顶梁与水平面之间的夹角。根据式(8)—式(10)求取前连杆的质心坐标(xb,yb)。
(8)
(9)
(10)
式中:L1和L2为前连杆的定位尺寸;L3为前连杆长度。
2 液压支架承载状态分析
液压支架与围岩处于耦合状态时,主要表现为承载失稳,顶梁合力作用大小及位置是耦合状态的重要表征和稳定性判断的重要依据。将掩护梁与顶梁铰接点的受力作为参量进行测量,精准求取顶梁受力情况,顶梁受力精准解算模型如图6所示。
取顶梁为隔离体进行受力分析,铰接点M取矩平衡方程为
(11)

图6 顶梁受力精准解算模型Fig.6 Accurate calculation of jacking beam model
式中:P1,P2分别为立柱和平衡千斤顶的作用力;θ1,θ2分别为立柱和平衡千斤顶与顶梁垂线之间的夹角;FMx,FMy为铰接点M水平和垂直作用力分量;Ff为顶梁所受摩擦力;L4,L5分别为立柱和平衡千斤顶的定位尺寸;L6为铰接点M的定位尺寸。
由图5各铰接点坐标确定θ1和θ2的值,通过式(11)求出合力作用大小Q和位置x与FMx,FMy及γ1,γ2,γ3的函数表达式。
根据液压支架的力平衡区理论,两柱掩护式液压支架的平衡区是指以外载荷在顶梁上的位置x为横坐标,以顶梁等效集中载荷Q为纵坐标的曲线下的面积,如图7所示。将支架承载能力区划分为3个区域:平衡缸受拉工作区;立柱工作区(Q2(x)下的面积);平衡缸受压工作区。其中,Q1(x)~Q3(x)为在不同作用位置所能承载的最大载荷。
图7 两柱掩护式液压支架力平衡区Fig.7 Force balance area of two column shield hydraulic support
将顶梁等效集中载荷Q幅值大小及作用位置与Q1(x)~Q3(x)进行比较,判断该载荷是否在液压支架的力平衡区,如果在力平衡区,则表示在该载荷作用下,支架的顶梁与底板可以保持稳定;否则,支架顶梁发生转动,出现“低头”或“高射炮”等姿态失稳线性接触,控顶效果差,易发生结构损坏现象。
3 液压支架支护状态感知原理
3.1 支护状态分类感知
通过对空间几何失稳和承载失稳主要模式及判别方法的分析,可知液压支架支护关键影响参数为倾角、压力和销轴力,具体见表1。
表1 失稳状态分类Table 1 Classification of instability states
3.2 感知原理
由于当前液压支架的压力传感器已发展成熟[14],所以仅对倾角及销轴力参量的测量原理进行分析。
3.2.1 倾角感知
倾角传感器需测量走向和倾斜2个方向的变化,因此选用双轴倾角传感器[14]。加速度式倾角传感器通过双轴角度测量模块来测量设备左右和前后倾斜角度,并通过模-数转换采集模块对双轴角度数据进行转换,然后传送给MUC核心处理单元对数据进行复杂的运算校准,MUC内置自动补偿和滤波算法,可消除环境变化造成的误差。该种传感器井下实际应用测量误差小于±1%。
文献[15]采用光纤光栅倾角传感器测量双轴倾角(图8),为液压支架状态感知提供了新的测量手段。其工作原理如下:重球与摆杆固定连接,摆杆通过球铰连接于外壳上,重球可在垂直平面内连续转动;摆杆杆体中部与一悬臂梁连接,该悬臂梁末端与另一固定在壳体上的悬臂梁连接,上述2个悬臂梁都为等强度梁。该光纤光栅倾角传感器共布置3条光纤布拉格光栅(Fiber Bragg Grating,FBG),其中在悬臂梁 1 的前或后表面上布置1条光栅 FBG1,在悬臂梁 2 的左右两表面中间各布置1条光栅 FBG2 和FBG2′,可实现双轴倾斜角度测量。
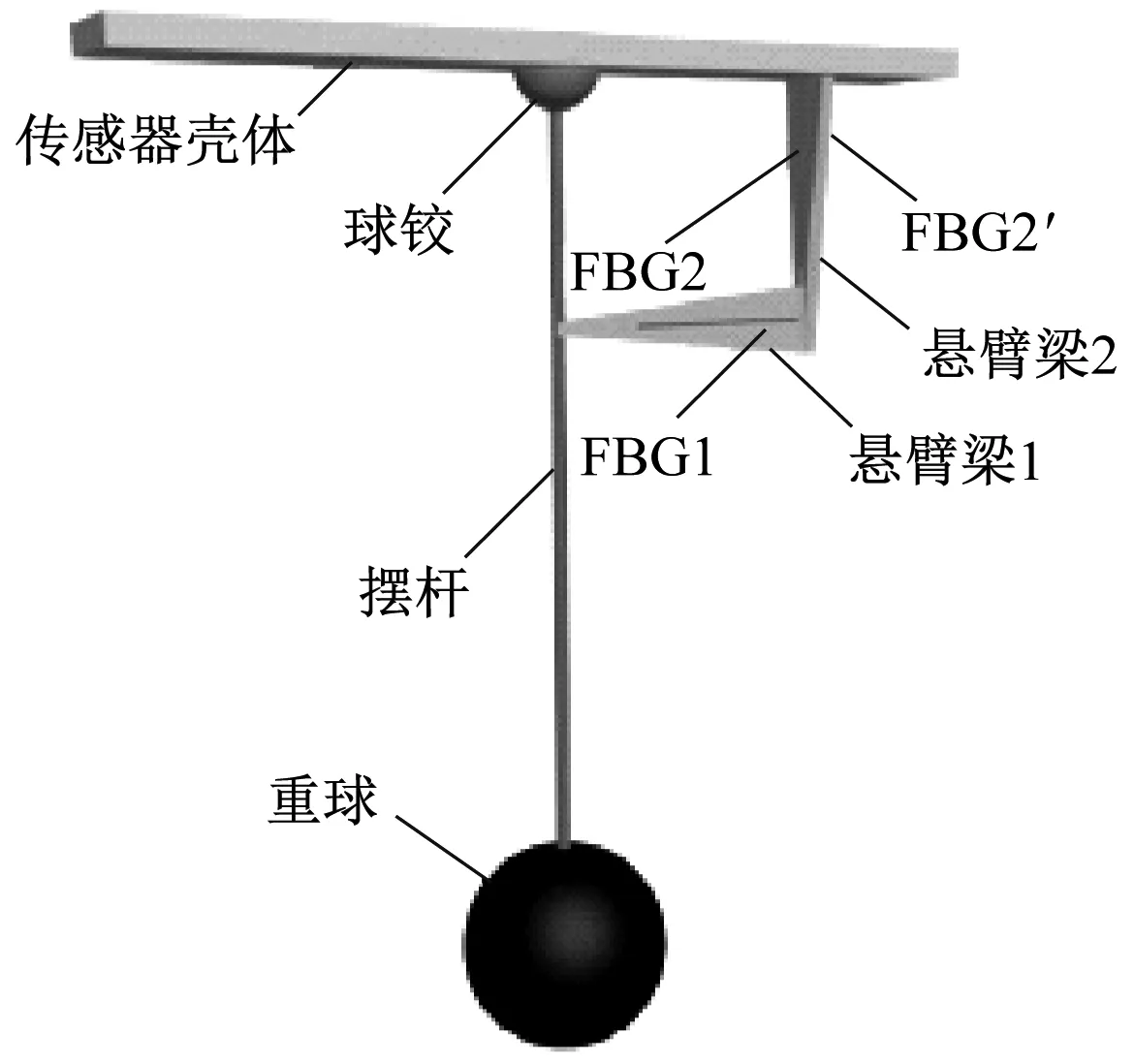
图8 光纤光栅倾角传感器结构Fig.8 Structure of FBG inclination sensor
3.2.2 销轴力感知
测力销是将掩护式支架的联结销贴上电阻应变片改制的一种测力仪器,用来测定掩护式支架铰接点受力的大小和方向。由于支架高度和姿态的变化,顶梁与掩护梁铰接点受力大小和方向变动幅度较大,因此需采用X/Y双轴向测力销轴传感器,输出2路独立信号,同步计算出合力;采用双剪切梁式结构,测力销与顶梁之间相对固定。
4 结论
(1) 液压支架与围岩处于非耦合状态时易发生几何失稳,构建几何平衡方程,得出重心高度和工作面倾角是影响稳定性的关键因素。提出了顶梁、底座和前连杆3个倾角确定液压支架重心位置的方法,利用双轴倾角传感器实现状态的感知,为临界失稳角的判别提供了有效手段。
(2) 液压支架与围岩处于耦合状态时易发生承载失稳,构建液压支架合力作用点的精确求解方程,通过测力销轴实现顶梁与掩护梁铰接点作用力的感知,求取合力作用大小和位置,并根据平衡区理论判定承载失稳类型。
