基于前方交会的无人机对目标定位方法*
2020-08-22孙世宇李建增胡永江赵文栋
孙世宇,张 岩*,李建增,胡永江,赵文栋
(1.陆军工程大学电子与光学工程系,石家庄 050003;2.解放军61267 部队,北京 100000)
0 引言
立体像对的空间前方交会是根据立体像对左右影像的内外方位元素和同名像点坐标量测值来确定该点的物方空间坐标[1]。随着近景、航空、航天等摄影测量技术的发展,前方交会理论在无人机上得到了广泛应用[2-3]。该方法需要的任务设备较少,定位精度与实时性较高,不易受外界干扰[4-5]。所以该方法的研究意义重大。
国内外学者做了大量研究,曾凡洋等提出车载全景影像核线匹配和空间前方交会[6]。该方法首先在两张全景核线影像之间利用尺度不变特征匹配[7](SIFT)描述子进行特征匹配,再次利用随机抽样一致性[8](RANSAC)算法进行模型估计,最后利用前方交会的原理计算出物点的空间三维坐标。该方法降低了全景影像匹配的难度,提高了匹配点数量和精度,实现了基于全景影像的量测等功能,但特征匹配算法的鲁棒性与模型估计算法的鲁棒性与实时性有待增强。吴迪军等提出多片前方交会法无人机测图技术[9]。该方法基于无人机高重叠度航摄影像进行前方交会测图,同时引入最小二乘估计,减弱了交会角大小对无人机地物坐标量测的限制,提高了交会精度,但该方法计算量较大,需要较多的交会航摄影像。李忠美等提出多像空间前方交会的抗差总体最小二乘估计[10]。通过建立目标点到多条同名射线距离的加权平方和作为目标函数,得到多像空间前方交会的抗差总体最小二乘估计,并引入了稳健估计理论。该方法对于双片前方交会也具有更高的交会精度及稳健性能,但对于无人机航摄影像之间的关联性,以及航向估计并未进行更深的探讨。
上述方法针对基于前方交会定位的不同步骤进行了创新与改进,但仍存在以下问题:1)传统前方交会法无法充分利用更多像片的观测数据。2)同名点自动获取方法的鲁棒性与实时性有待提高。3)传统方法中的像空间辅助坐标系无法自动建立,航线定向依赖人工。
针对以上问题,基于前方交会的无人机航摄影像定位方法(UAVTLSFI),首先对所有航摄影像进行特征匹配,得到影像间关系。其次提出航线定向与坐标系建立法,来实现像空间辅助坐标系的自动建立。再次提出基于图像变换关系的前方交会法,来实现目标点的三维定位。最后进行了理论说明和实验验证。
1 方法流程

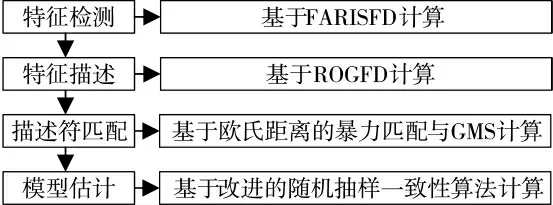
图1 特征匹配流程图
特征匹配包括同源影像间匹配(航摄影像之间)与异源影像间匹配(航摄影像与底图)。按照特征检测、特征描述、描述符匹配,与模型估计顺序进行。其中:首先,利用基于快速自适应鲁棒性尺度不变的特征检测子[11]检测出特征点。其次,利用鲁棒性交叠的标准特征描述子[12]生成特征点的描述符。再次,利用基于欧氏距离的暴力匹配方法对描述符进行双向匹配,并利用基于网格的快速、超鲁棒特征匹配运动统计算法[13]剔除误匹配。最后利用基于特征距离与内点的随机抽样一致性算法[14]计算得到单应性矩阵。两种特征匹配并行处理。
步骤2 建立坐标系。利用航线定向与坐标系建立法自动解算航向,同时建立像空间辅助坐标系。
步骤3 影像定位。利用基于图像变换关系的前方交会法,来建立物空间辅助坐标系,然后解算所有航摄影像内所有像素点的三维坐标。
2 航线定向与坐标系建立法
2.1 具体方法
通过特征匹配得到序列航摄影像之间的几何关系,来判断航向与计算机图像坐标系的关系,然后通过图像变换为坐标系的建立作基础。
航线定向与坐标系建立法按步骤1~2 顺序执行:
步骤1 按式(1)~式(3)并行计算得到Zt。

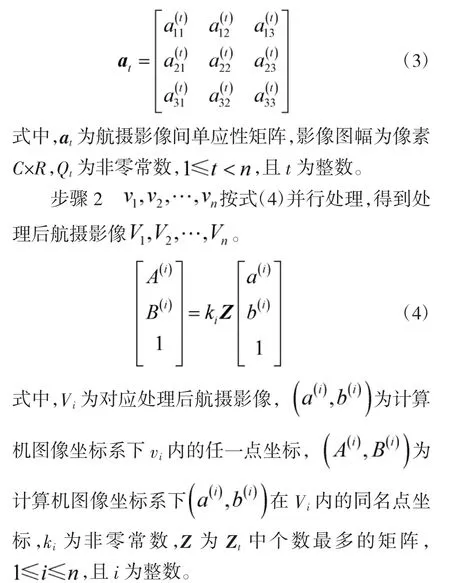
2.2 式(4)的证明
证明:

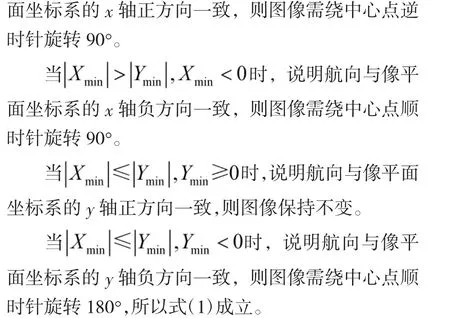
虽然航带间转换时不满足以上关系,但航带间变换中拍摄的影像数量相对影像总数较少,且航摄机安装位置固定,所以取Zt中个数最多的矩阵Z,利用Z 对全部影像进行变换。再由计算机图像坐标系与单应性矩阵定义可证式(4)成立。
证毕。
3 基于图像变换关系的前方交会法
3.1 研究思路
在对某目标点定位时,传统方法利用包含该目标点的立体像对进行前方交会解算,由于参与解算的影像数量较少,外方位元素测定的偶然性较大,导致定位误差较大,精度较低。无人机在高空获取航摄影像,或地表起伏较小时,地表可忽略为平面。通过特征匹配可以得到航摄影像之间的几何关系,便可将所有其他航摄影像与包含目标点的两张影像建立起几何关系,那么在解算图像内任一点时,均可将所有影像纳入前方交会计算体系,通过最小二乘抗差估计进行整体平差,剔除粗差,提高定位精准度。
3.2 具体方法
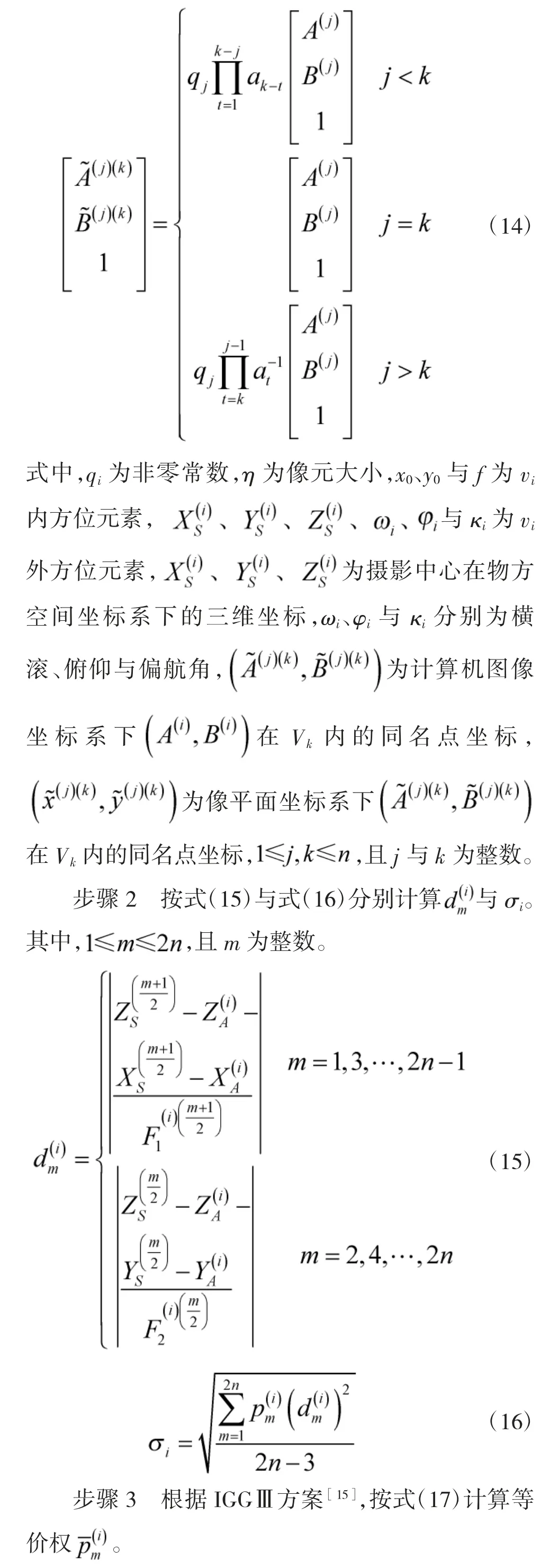
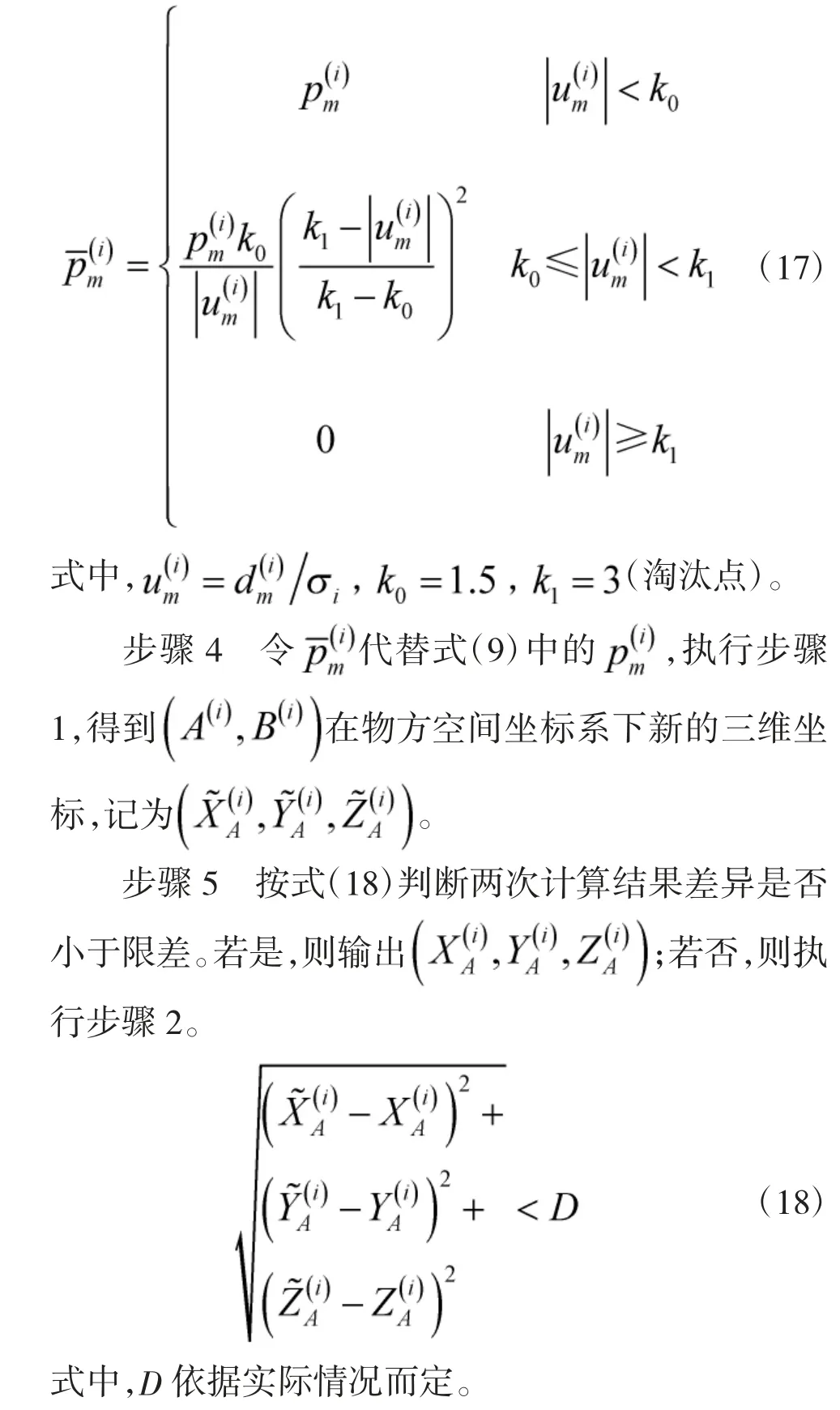
基于图像变换关系的前方交会法按步骤1~5顺序执行:

3.3 式(7)的证明
同理可证式(14)成立。
对计算机图像坐标系0-cr 与像平面坐标系0-xy 进行转换,两种坐标系如图2 所示,引入内方位元素,则:
式中,c 和r 分别为在计算机图像坐标系下像点的横、纵坐标,x 和y 分别为在像平面坐标系下同名点的横、纵坐标。

图2 图像坐标系
所以式(13)成立。
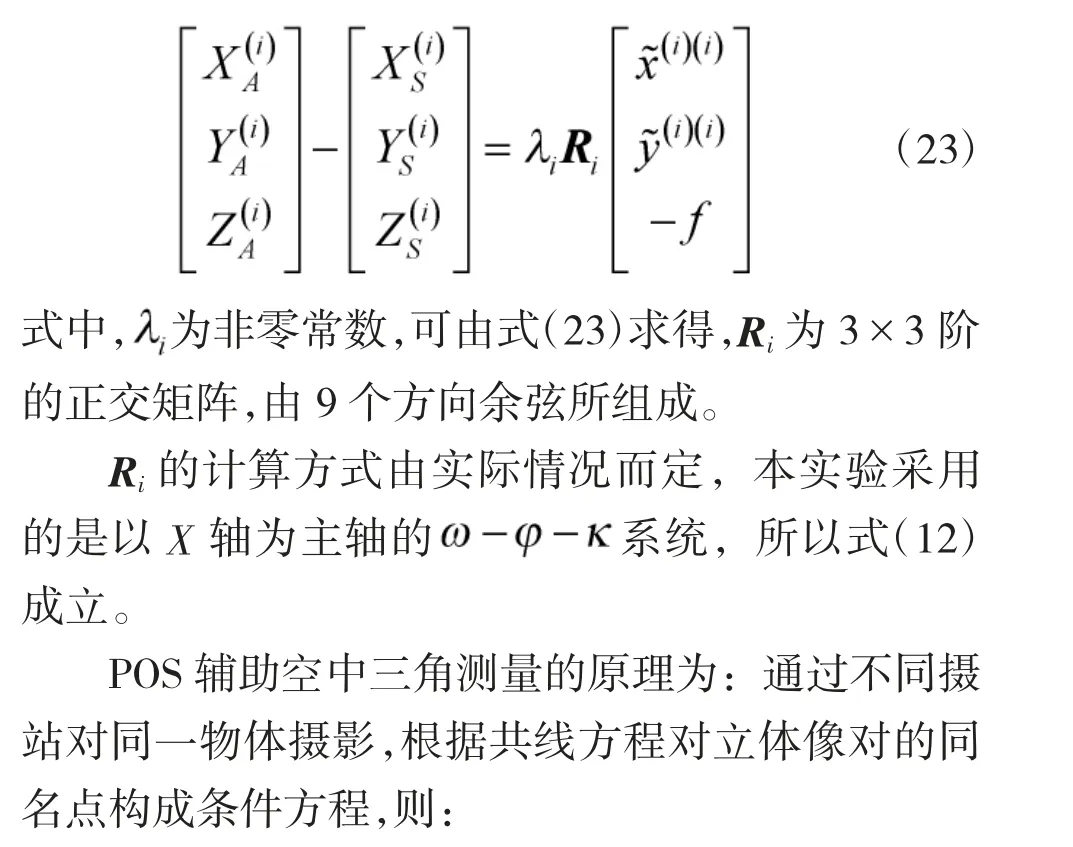
由共线条件方程式可得:

4 实验验证
4.1 实验设置
4.1.1 实验平台参数
笔记本计算机配置:处理器为2.5 GHz i7 第4代,系统为64 位Win10,编程环境为链接OpenCV 3.00 的Visual Studio 2015。
4.1.2 数据集
对某地区进行实验,技术参数如表1 所示,部分无人机影像与相关谷歌数字卫星地图数据如图3与表2 所示。
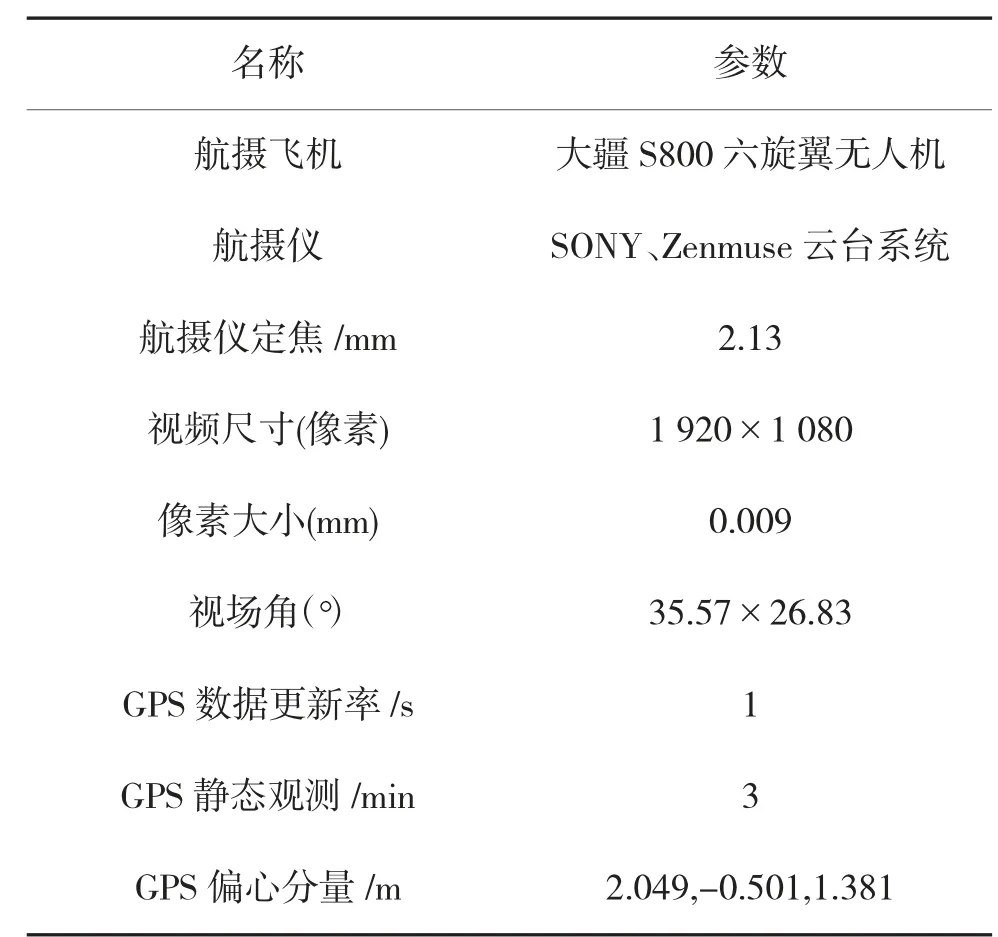
表1 实验影像主要技术参数

图3 测试所用航摄影像与谷歌数字卫星地图
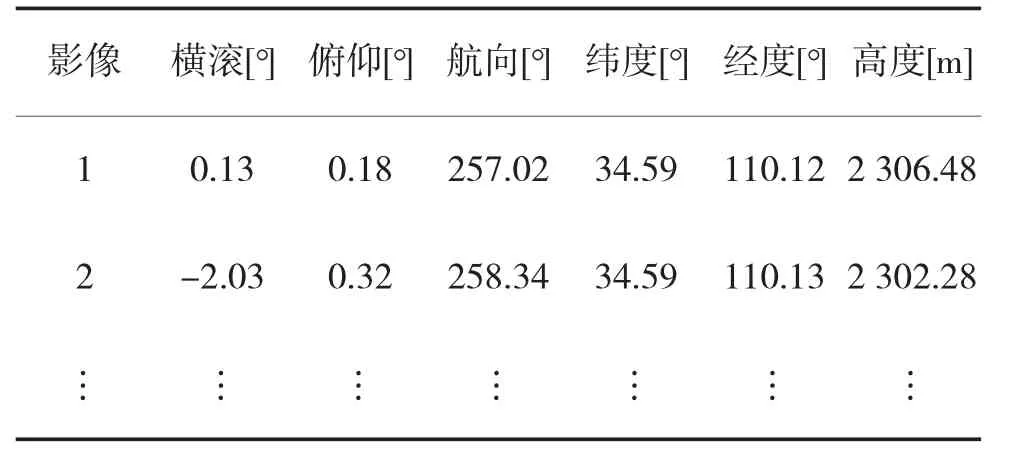
表2 试验视频帧的POS 数据
4.1.3 实验对象及相关参数设置
如下页表3 所示,实验将基于控制变量的准则,针对目标定位方法的不同子方法进行对比分析。

表3 子方法组合
文献[6]特征匹配方法相关参数设置:
SIFT 检测子:组数:4,层数:4,对比阈值:0.04,边缘阈值:10,σ=1.6。
SIFT 描述子:128 描述子。
匹配方法:基于欧氏距离的暴力匹配(双向匹配验证)。
RANSAC 置信度:0.99。
4.1.4 评估准则
为了衡量算法的鲁棒性与运行效率,本文主要通过定位均方误差与平均每幅耗时两个指标衡量算法。
指标1:定位精确度的衡量指标为定位均方误差,定义式如下:
式中,T 为平均每幅耗时,t 为定位算法总耗时,为航摄影像总数。
4.1.5 实验过程
首先选取不同航带的200 幅航摄影像,分别利用A、B 与UAVTLSFI 进行定位。然后在每幅航摄影像中随机选取10 个测量点,共计2 000 个测量点,以谷歌数字卫星地图的地理信息为理论值来计算定位误差,同时计算平均每幅耗时。
4.2 实验结果与分析
为了清晰直观地对比分析实验结果,将影像内所有像素点按定位结果映射到谷歌数字卫星地图上。部分的定位结果如图4 所示,全部测量点定位误差曲线如图5 所示,定位数据统计如表4 所示。

图4 定位结果
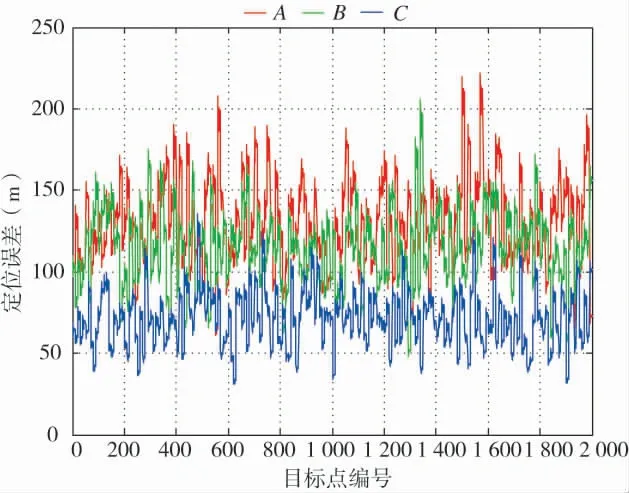
图5 定位误差曲线

表4 定位结果
将实验结果分析如下:
1)3 条曲线总体呈现以10 个点为单位的随机波动态势,这是由于测量点都是利用图像间单应性矩阵进行前方交会定位的,所以同一幅影像中所选取测量点的定位误差较为接近。
2)由A 与B 的对比,可以验证:由于特征匹配决定了图像之间几何关系的求解,所以很大程度上影响了前方交会目标定位的精准度与执行效率。
3)由B 与UAVTLSFI 的对比,可以验证:航线定向与坐标系建立法实现了所需功能,且执行效率较高。相对于文献[10]的方法,基于图像变换关系的前方交会法精准度有明显提高。这是由于该方法将所有影像纳入前方交会计算体系,再通过最小二乘法进行整体平差,来提高定位精度。虽然特征匹配误差会小幅降低平差准度,但该平差方法结合航路设计大幅降低了POS 的系统误差,又剔除了粗差,所以提高了定位准度。相对于航摄影像的特征匹配,前方交会的计算量对于整体解析影响极小。
5 结论
本文提出UAVTLSFI,并通过理论与实验验证了方法的可行性与优势,主要得到以下结论:
1)本文特征匹配方法提高了前方交会目标定位的精准度与执行效率。
2)航线定向与坐标系建立法,实现了航向的自动解算,完成了像空间辅助坐标系建立。
3)基于图像变换关系的前方交会法不仅提高了定位的精准度,同时保证了执行效率。
4)局限性:若飞机高度越低,地形起伏越大,则UAVTLSFI 的精确度越差。