针对武器制导数据链的典型干扰场景建模方法
2020-08-22雷迎科罗路为
邵 堃,雷迎科,罗路为
(国防科技大学电子对抗学院,合肥 230037)
0 引言
武器制导数据链主要用于负责传递目标信息、指控信息和环境信息,实现武器与平台(载机、友机),武器与武器之间的连接,具有通用性好、适用性强、超视距传输以及与其他平台信息交换的实时性等突出特点。自从20 世纪80 年代开始,美军就开始研制武器制导数据链并陆续装备相应的武器系统。目前在世界各国军队中,美军陆海空部队[1-5]已大规模、成体系装备武器制导数据链。由于武器制导数据链具有窄波束性、突发性、定向性等特点,这给对抗方实施侦察和干扰提出了严峻的考验。
目前国外文献少有关于武器制导数据链干扰场景的公开报道,国内的鲍虎[6]等人考虑到海上作战特点,以舰载电子战直升机作为干扰平台对抗搭载数据链系统的反舰导弹为例,对武器制导数据链的对抗场景进行了初步研究。金飙[4]以SLAM 空地导弹为例,分析了武器制导数据链在作战过程中“人在回路”的实现模式,但其只对对抗系统的关键技术作了简要描述,没有结合武器制导数据链关键制导阶段提出具体的干扰策略。姚玉山[7]等人对地面侦测和干扰技术的有效性和可行性进行了论证,给出了一种简单的干扰机部署方法。吕卫华[8]等人对武器制导数据链的抗干扰性能作了详细的评估。龚燕[9]等人根据有效干扰时间的长短对干扰机部署位置进行优化,但文章中并未考虑武器制导数据链的突发性和链路通信时间短的突出特点。
现有研究存在的突出问题是对武器制导数据链干扰技术的应用场景描述不全面,缺乏对武器制导数据链干扰技术的使用条件、部署方法、干扰时机及干扰策略的系统分析,本文针对上述问题,提出了武器制导数据链的典型干扰场景建模方法。
1 目标分析
1.1 武器制导数据链应用场景
目前美军已广泛投入使用的武器制导数据链[4]有AN/AWW-13 和AN/AXQ-14。应用在空地导弹上武器制导数据链主要包括弹载数据链终端、机载数据链吊舱和飞机数据链控制面板3 个部分。
搭载武器数据链的导弹打击的目标为已知位置的定目标,在任务开始之前敌方飞行员的准备工作就是在飞机驾驶舱熟悉目标附近的地貌标志性建筑。然后提前在地图上设定一个防空武器的威胁范围。搭载武器制导数据链的飞机具有自动驾驶功能,驾驶员会设置一条与进攻航向垂直的航线用作参考。
完成准备工作之后,一架装备武器制导数据链的飞机从敌方航母起飞,操控人员设置好数据链吊舱接收范围并打开自动制导模式,使导弹可以自动飞向目标,然后激活引信。当敌方装备武器制导数据链的战机距目标d 的时候,飞机提醒系统操控人员已到达导弹的最大射程位置。战斗机发射一枚空地导弹,此时操控人员打开自动驾驶,飞机转向之前设计好的航线。已知搭载武器制导数据链的导弹制导过程分为3 个阶段:弹道抛离阶段、巡航阶段和末制导阶段。
导弹发射后,飞机继续稳定飞行到达预先设定的数据链吊舱接收信号区域,并在此范围内盘旋。当导弹距离目标还有t0的时候,导弹通过反向数据链信号传回地形、目标、方位等视频图像信息供操作员识别目标。当操控人员找到目标后,关闭导弹的自动制导功能,通过前向链路发送指令,开始人工修正导弹轨迹,在导弹攻击前t2进行最后锁定,进入最后的惯性制导。导弹击中目标之后,飞机向后方转弯并飞离作战区域,其中武器制导数据链末制导过程如图1 所示。

图1 末制导过程
1.2 载机轨迹建模
对搭载武器制导数据链的载机和导弹建模的主要目的是为了反映因载机和导弹高速机动造成通信环境的变化。因此,对搭载武器制导数据链载机与导弹轨迹分析多采取简化建模[9-12]方法。载机模型参数见表1 和表2 所示。
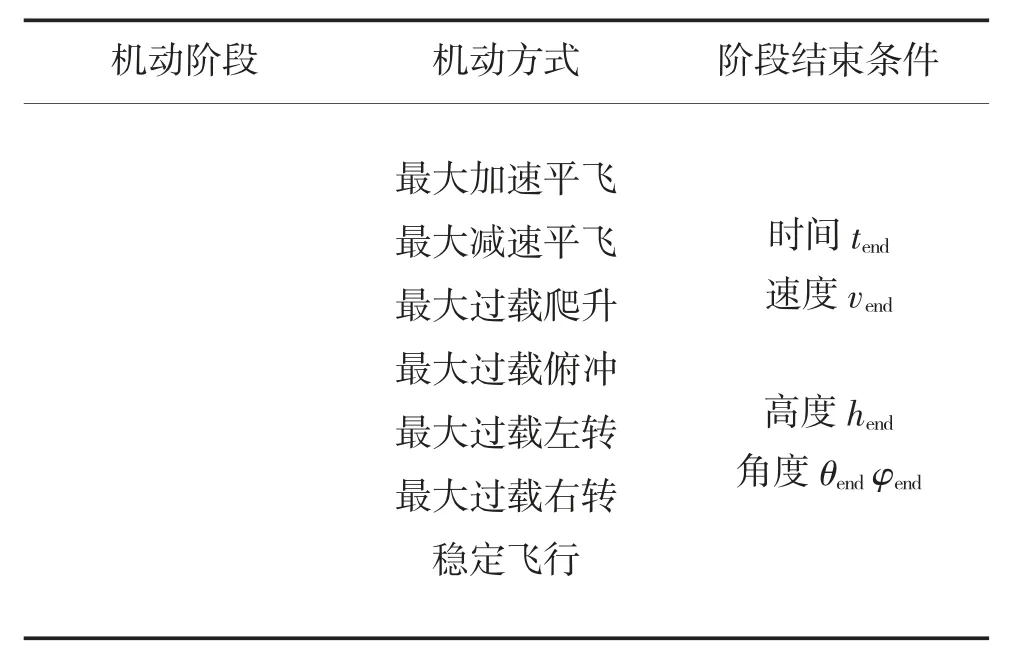
表1 载机机动阶段
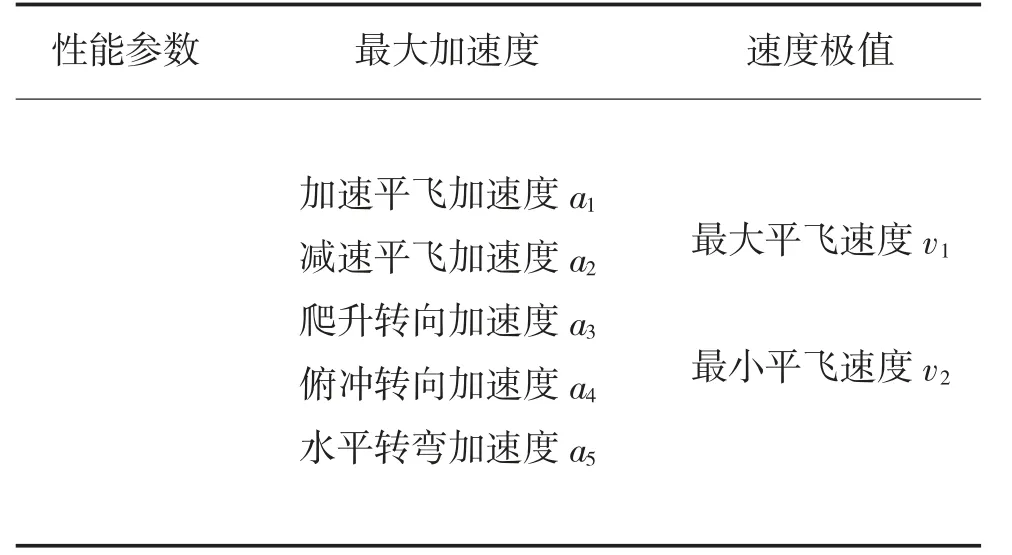
表2 载机性能参数
其中,最大过载左转和最大过载右转的轨迹方程组为:

最大过载爬升和最大过载俯冲分为改变速度倾角的过程、定倾角的爬升或俯冲过程和恢复平飞过程,其轨迹方程组为:
载机的最大加速平飞、最大减速平飞和稳定飞行的轨迹如式(16)和式(17)所示:

式中,S 为载机的瞬时位置,v 表示载机速度矢量,θ表示瞬时水平方向角,φ 表示瞬时俯仰角,a 表示各阶段的加速度,Δt 表示时间间隔。
1.3 导弹轨迹建模
导弹模型参数如表3 所示。
其中,抛撒段导弹发动机未工作,导弹运动轨迹如式(18)和式(19)所示:

下滑段和俯冲段与载机俯冲/爬升段运动过程类似,其轨迹可由式(8)~式(17)表示。平飞段可分为平飞转向、匀加速直线运动和匀速直线运动3 个阶段,其中平飞转向阶段可由式(1)~式(7)表示。
表3 导弹模型参数
2 干扰场景
2.1 干扰策略分析
根据情报支撑分为两种干扰策略:一是有雷达情报提供数据链载机方位的情况;二是没有载机方位的情况。两种干扰策略示意图如图2 所示。
图2 干扰策略流程图
2.1.1 有雷达情报提供数据链载机方位的情况
在前期有雷达情报提供数据链载机方位的情况下,干扰思路为:“侦收反向链路-干扰反向链路(载机接收)-侦收前向链路-干扰前向链路(导弹接收)”,其优点在于能够实现对前向链路和反向链路的封锁;不足之处在于需要提供数据链载机方位的先验信息,而且需要侦察设备能够及时发现前/反向链路信号。
下面针对上述干扰流程进行详细描述。当搭载武器数据链的导弹距离目标还剩t0时间,反向链路开启,此时我方侦察设备侦察其反向链路,经过数据的处理之后,迅速开启干扰装置对机载数据链吊舱实施干扰。

图3 对反向链路干扰示意图
敌方飞机因受到我方干扰机的干扰,导致其数据链的信号丢失,此时飞机因为接收不到导弹通过反向链路传回的信号,敌方载机将通过前向链路发射一个改变反向链路信号接收区域的信息,因为我方的侦收带宽范围可同时覆盖其前向和反向链路,当我方侦收到敌方的前向链路的时候,迅速切换干扰天线、干扰样式和干扰频点对准导弹方向实施干扰。
图4 对前向链路干扰示意图
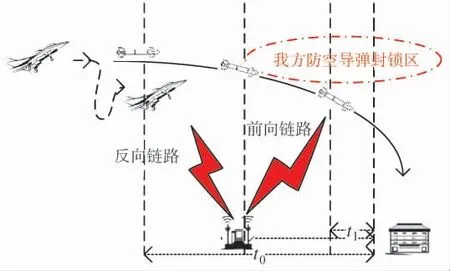
图5 对最终轨迹修正信号干扰示意图
当导弹距离目标还有t1时间,此时载机开启数据链前向链路,发送指令修正导弹轨迹,此时我方侦察设备侦收到其前向链路信号,迅速对准导弹空域,实施干扰,达到压制其前向链路通信,使导弹接收不到载机发来的修正指令信息,致使导弹偏离目标。
2.1.2 没有载机方位的情况
在没有载机方位的情况下,干扰整体思路为“侦收反向链路-干扰前向链路”,其优点在于能够实现对前向链路全程封锁干扰;不足之处在于无法对其返向链路实施干扰。其基本的干扰流程如下:
1)侦察设备侦收武器制导数据链反向链路信号。
2)根据测得的方位信息,在侦察设备引导下启动干扰机干扰前向链路。
2.2 干扰时间分析
干扰信号到达通信端机所需的总时间由下式给出:

我方需要在导弹进入惯导阶段前完成信号侦收截获、分析识别、干扰引导和信号传输等环节。
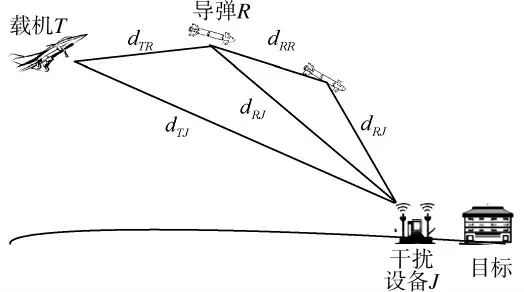
图6 对武器制导数据链干扰示意图
在实际的侦察干扰中,相比于t传输和t干扰引导,对武器制导数据链分析时间占据主要的时间开销。因此,从干扰时间的角度看,在高效的分析识别处理的基础上,完全可实现对武器制导数据链的干扰。
2.3 干扰波束范围分析
武器制导数据链广泛采用定向窄波束天线[13],它能够将天线波束汇聚成很窄的针状,并根据战斗机或导弹的飞行状态,实时将波束对准通信目标。其中机载天线多采用全向天线,弹载天线多采用定向天线。对于定向天线,其天线增益简化模型为:
若我方干扰信号能进入武器制导数据链天线主瓣,将极大地提高干扰效率。干扰机与弹载数据链天线主瓣方向夹角可由式(22)计算。

考虑到最差的情况,若我方干扰信号不能进入武器制导数据链天线主瓣,提出旁瓣注入概念,由于导弹在不断朝目标运动,导致dTR和dRJ不断变化,经计算可以得到我方干扰天线的参数,同时对我方干扰波形进行优化设计,进一步对旁瓣注入策略进行引导,由于对前向链路进行干扰我方设备具有距离优势,距离优势可由式(23)计算,从而给旁瓣注入方案带来了可行性。
2.4 干扰发射功率估算
要想成功实施干扰,需要满足干扰设备发射功率到达接收端机的功率应大于目标发射设备发射功率到达接收端机时的功率。
其中,P1为目标发射端机发射功率,P2为干扰机发射功率,G1为目标发射端机发射天线增益,G2为干扰机干扰天线增益,d1为目标发射端机到接收端机的通信距离,d2为干扰机到接收端机间的通信距离。
3 实验仿真
武器制导数据链干扰技术应用场景的仿真主要包括载机与导弹运动轨迹仿真、我方防空武器的威胁区域仿真、不同战术条件下干扰机部署仿真、干扰机部署在不同位置的干扰效果仿真。
3.1 载机与导弹典型轨迹仿真
搭载武器制导数据链的载机初始位置为(0,0,10 000 m),载机先平飞60 s;然后进入最大过载转弯阶段;再向目标方向稳定平飞28 s;接着俯冲下降到8 700 m 高度;再平飞至预先设定的数据链吊舱接收信号区域;当导弹击中目标之后,飞机向后方转弯到与初速相反的方向即-180°,飞离作战区域。我方防空武器的威胁半径为40 km。载机的典型速度值为265.2 m/s,水平转弯加速度为10 m/s2,俯冲转向加速度为12 m/s2,爬升转向加速度为5 m/s2。
导弹发射时刻为0 s,导弹的典型速度值为298.35 m/s,抛撒段持续10 s;俯冲倾角为-30°,俯冲结束高度为800 m,俯冲转向加速度为38 m/s2,爬升转向加速度为53 m/s2,水平转弯加速度为2 m/s2,导弹在距目标1 min 时开启反向数据链路,导弹在距目标25 s 时开启前向数据链路,惯性制导阶段持续时间为6 s。
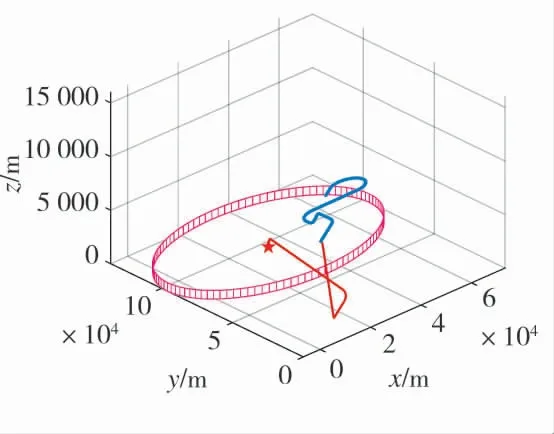
图7 载机与导弹典型轨迹
3.2 不同战术条件下干扰机部署
3.2.1 可以获得导弹攻击方向的情况
由于机载数据链天线多采用全向天线,弹载数据链天线多采用定向天线,因此,干扰机的部署位置直接决定着干扰信号能否进入弹载数据链天线主瓣范围内。以前向数据链路开启时刻为典型时刻,此时导弹距离目标还剩25 s。以5 km 为步长对保卫目标周围50 km×50 km 的区域做干扰机部署仿真。
实验参数:弹载数据链天线主瓣增益为13 dBi;旁瓣增益为-3 dBi;天线半波束宽度为20°。
下页图8 中颜色栏表示干扰机与弹载数据链天线主瓣方向夹角,单位角度。如仿真结果所示,以保卫目标为坐标原点,以导弹入射方向为y 轴正半轴方向,干扰机布置在x 坐标-5 km~0 km,y 坐标10 km~25 km 之间的范围和x 坐标-10 km~-5 km;y坐标20 km~25 km 之间的范围,干扰信号可以进入弹载数据链天线主波束范围。
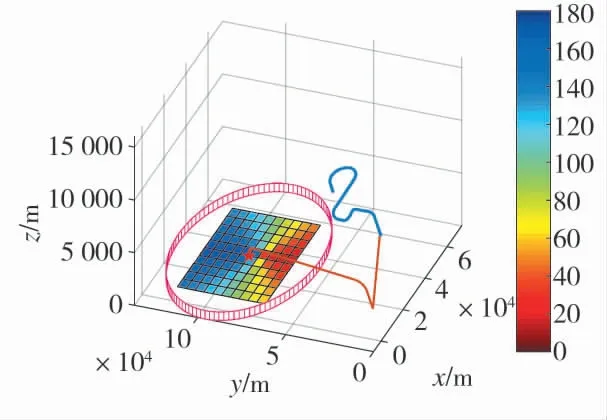
图8 可以获得导弹攻击方向时的干扰机部署方法
3.2.1 无法获得导弹攻击方向的情况
由于战场环境的复杂性,在我方不能及时获得敌方导弹攻击方向时,增加了从干扰波束角度部署干扰机的难度。因此,根据本文提出的旁瓣注入方案,结合2.4 节的干扰发射功率估算方法,从干扰发射功率角度对干扰机部署进行优化。
实验参数:机载数据链吊舱发射功率为50 W,机载数据链天线增益为8 dBi,弹载数据链天线主瓣增益为13 dBi,旁瓣增益为-3 dBi,天线半波束宽度为20°,导弹干扰机发射天线主瓣增为13 dBi,成功干扰的干信比要求为3 dB。
图9 中颜色栏表示成功干扰时所需最小的干扰发射功率,以dB 表示。考虑到路基干扰机的机动性较差,为及时应对不同攻击方向的数据链制导武器,如仿真结果所示,干扰机应布置在目标周围5 km 范围内。
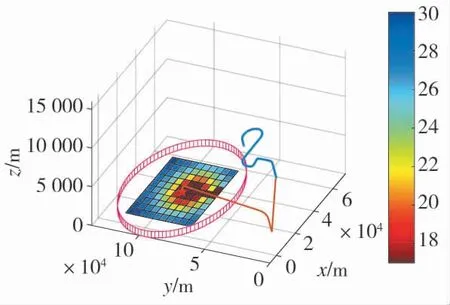
图9 无法获得导弹攻击方向时的干扰机部署方法
4 结论
本文提出针对武器制导数据链的典型干扰场景建模方法,首先介绍了武器制导数据链在作战过程中的应用,在典型作战场景中对搭载武器制导数据链的载机导弹的运动轨迹进行了分析与建模。然后在结合武器制导数据链各通信阶段特点的基础上,根据实际作战中情报支撑提出了两种干扰策略。针对武器制导数据链通信开启时间短的特点,开展了干扰时间的分析;针对武器制导数据链窄波束性和定向性的特点,开展了干扰波束范围的分析,提出旁瓣注入的概念;根据武器制导数据链和干扰机的技术指标估算了干扰功率。最后通过仿真实验给出了不同战术条件下干扰机的部署方法。仿真实验表明,该方法能较全面地描述武器制导数据链典型干扰场景。