基于PLC多协议智能立体车库控制系统的设计
2020-08-14于国健陶丽萍
于国健 陶丽萍
摘 要:文章所介绍的多协议网络化智能立体车库系统可用于解决国内外普遍面临的停车难的问题。该控制系统采用PLC作为控制机构,采用视觉相机作为检测机构,基于CC-Link网络通讯协议、Modbus网络通讯协议设计。三台PLC之间使用CC-Link网络通讯协议,光源控制器与其中一台PLC使用Modbus网络通讯协议。该系统还有触摸屏对系统进行操作与监控,增加了系统工作的稳定性。同时还可扩展多个模块,提高了系统的个性化需求,满足如今市场对智能立体车库的多元化需求。
关键词:PLC;视觉相机;光源控制器;CC-Link通讯;Modbus通讯;语音播报
Abstract:The multi-protocol networked intelligent three-dimensional garage system introduced in this paper can be used to solve the parking problem commonly faced at home and abroad. The control system adopts PLC as the control mechanism,visual camera as the detection mechanism,and is designed based on CC-Link network communication protocol and Modbus network communication protocol. CC-Link network communication protocol is used between the three PLCs,and Modbus network communication protocol is used between the light source controller and one of the PLCs. The system also has touch screen to operate and monitor the system,which increases the stability of the system. At the same time,it can also expand multiple modules,improve the personalized demand of the system,and meet the diversified demand of the market for intelligent three-dimensional garage.
Keywords:PLC;vision camera;light source controller;CC-Link communication;Modbus communication;voice announcements
0 引 言
随着我国经济的高速展,我国国民汽车保有量也大幅度的上升,随之而来的就是城市停车问难这一问题。本文中所提出的智能立体车库未这一问题提供了很好的解决方案,它的控制系统采用了三菱PLC、光源控制器昆仑通态触摸屏来对立体车库系统进行控制,信捷的视觉相机进行车牌识别。相对于市场上其他种类立体车库而言,在系统的智能化与个性化有着极大的提升。本文基于江苏省高等职业教育高水平骨干专业建设项目提出,在人才培养方案中開设创新课程,包括创新创业类理论课程、专业实践课程以及具体课程的教学创新项目、教育教学活动,基于项目建设理念,开展了学生匠人工坊等活动,进一步提升学生创新创业能力。
1 系统控制要求
智能立体车库控制系统共包含5台电机,分别是X轴、Y轴驱动电机(M1、M2电机为伺服电机,采用方向+脉冲的形式控制,每旋转一圈需要PLC发出10 000个脉冲);X轴、Y轴散热电机(M3、M4电机为双速电机,要求能自动进行→YY的切换,并且还要考虑必要的过载连锁保护);主车位大门抬升电机(M5电机为三相异步电动机,要求能够进行正转星三角控制,需要考虑必要的连锁保护)。Z轴推动气缸YV1由PLC数字量点控制,置位伸出,复位返回。
2 系统硬件组成
该控制系统共包含3台PLC、1台光源控制器、1台人脸识别模块。CC-Link通讯系统中主站由1台三菱Q系列PLC担任,从站分别由三菱FX-3U-32MR和FX-3U-32MT PLC担任;Modbus通讯系统中主站由三菱FX-3U-32MR担任,从站由信捷光源控制器与人脸识别相机担任。系统中还包含5台电机:M1~M5,M、M2电机采用DH22-5-2005-315/350-1-1500型伺服电机,采用MK-SD-S4T132-G型伺服驱动器驱动控制;M3、M4为双速电机可实现高低速控制;M5为三相异步电动机可实现正反转星三角控制。控制系统硬件结构图如图1所示。
2.1 CC-Link主站电气原理图
主站PLC采用三菱Q系列PLC,三菱Q系列PLC为大型模块式PLC,可以级联不同类型的PLC和计算机,从而组成控制范围很大的局域网络,适用于大型的自动化控制系统[1],本系统中该PLC采用Q00U CPU模块、QB35基板、Q61P电源模块、2台QX40数字量输入模块、QY10继电器型输出模块以及QJ61BT11N通讯模块。主站电气原理如图2所示。
2.2 CC-Link从一站电气原理图
从一站选用三菱FX-3U-32MR PLC,该型号PLC板载16路数字量输入、16路继电器型输出。用于控制系统中的X轴、Y轴散热电机M3、M4和主车位大门抬升电机M5。并且作为Modbus主站将不支持CC-Link通讯设备中的数据与主站Q系列PLC进行交互。从一站电气原理如图3所示。
2.3 CC-Link从二站电气原理图
从二站选用三菱FX-3U-32MTPLC,该型号PLC板载16路数字量输入、16路晶体管型输出,其中3路为高速脉冲输出端口。用于控制系统中的X轴、Y轴驱动电机M1、M2和Z轴推动气缸YV1。从二站电气原理如图4所示。
3 PLC控制程序流程图
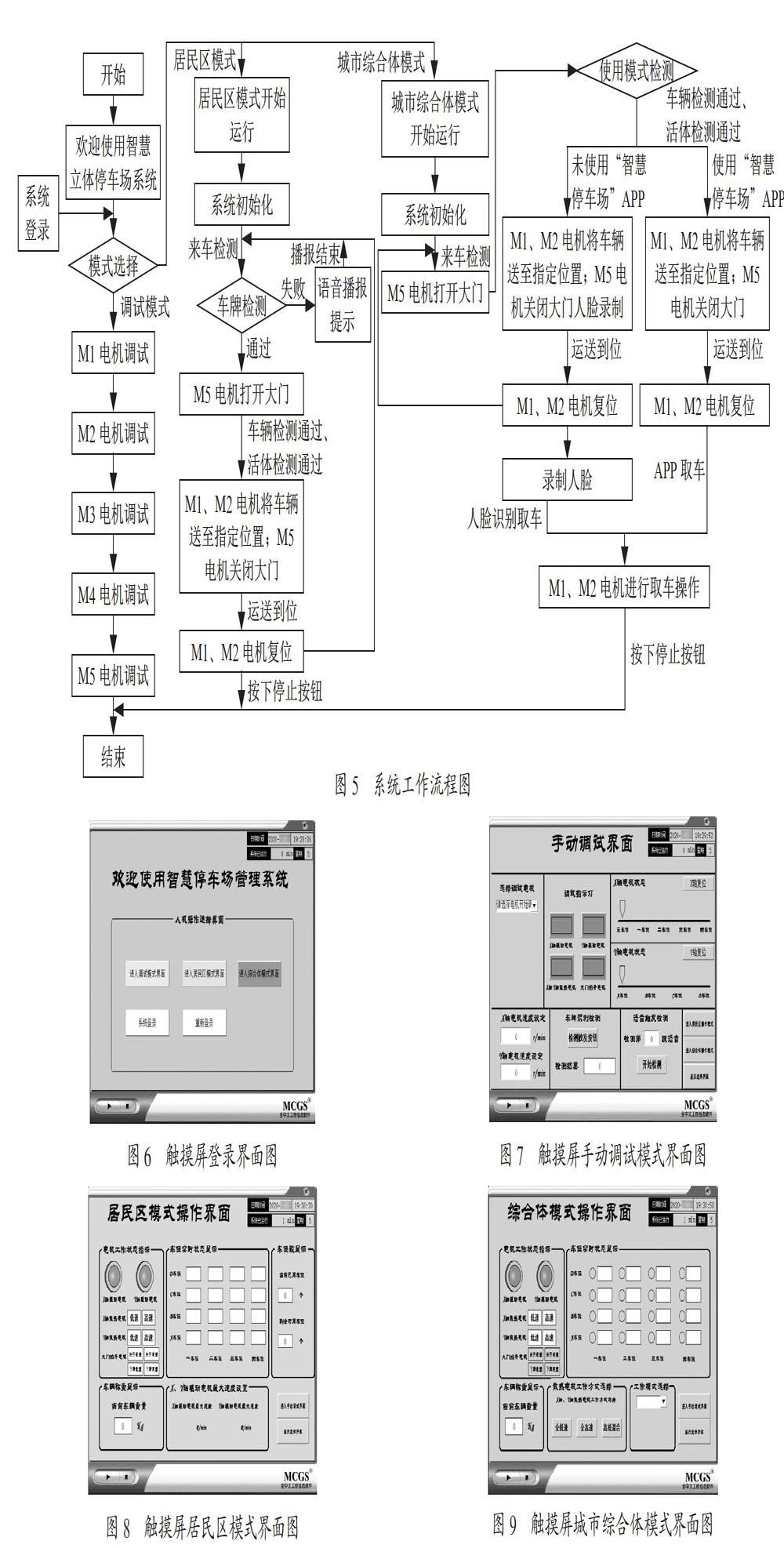
本文中所介绍设计的智能立体车库系统,具有多种工作模式。在不同的使用场合,可以进行多工作模式的切换。为了提高在停车当中车辆位置的精确度,提高系统的安全系数,在进入工作模式前,可以进行手动模式的电机调试,以保障运行的稳定性。系统工作流程图如图5所示。按照该流程图,在编程软件当中完成PLC程序的编写。
4 MCGS组态界面设计
该智能立体车库控制系统的操作员可使用触摸屏对整个工作系统进行远程操作与监控。触摸屏可以实时显示当前停车场状态、车辆牌号以及对应车位、剩余车位信息等,规避了系统运行过程当中可能存在的风险。组态界面设计图如图6~9所示。
5 系統CC-Link通讯
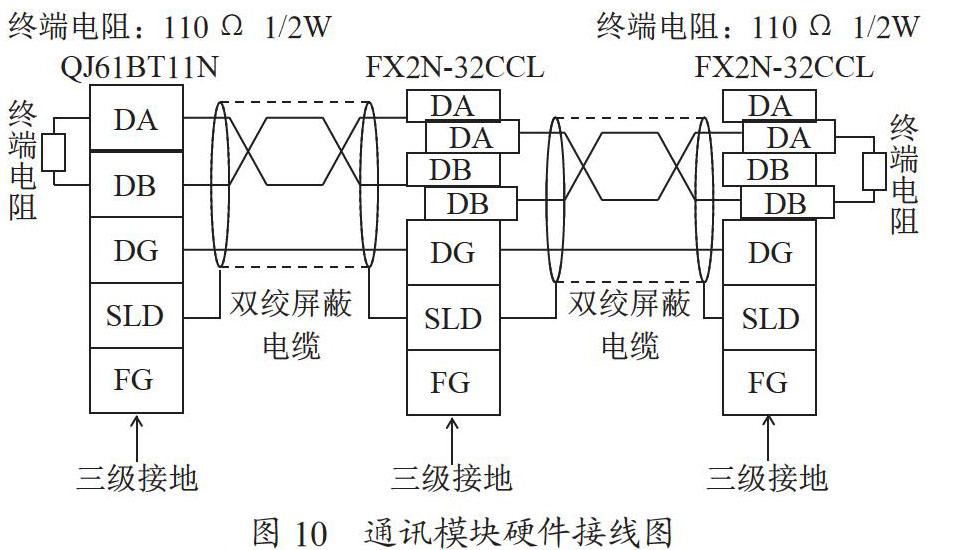
该智能立体车库系统中,3台三菱PLC之间采用CC-Link总线通讯的方式进行主从站控制。这种串行多点总线式通讯方式具有超高的数据传输速度,最高可达 10 MB/s,底层通讯协议遵循RS-485。将3台PLC之间的通讯模块使用CC-Link专用电缆进行连接,并对三台PLC进行站号的设置,主站PLC默认为“0”号站,因为2台PLC都占用了4个站的位置,所以将从一站和总二QJ61BT11N站站号分别设置为“1”“5”。通讯模块硬件接线图如图10所示。
CC-Link通讯硬件配置后,还需在编程软件GX Works2中对主站Q系列PLC进行参数组态,在“I/O分配设置”中根据对应的插槽编辑“起始XY”的参数,“输入”“输入”“输出”“智能”分别对应“0000”“0010”“0020”“00A0”。设置结束后,接着在“网络参数”中进行“CC-Link”参数的编辑[2]。
6 系统Modbus通讯
该智能立体车库系统中,为了解决光源控制器不支持CC-Link总线式通讯协议的问题,还需要采用Modbus总线式通讯使光源控制器的数据能够与主站进行交互。Modbus是Modicon公司为该公司生产的PLC设计的一种通信协议,发布于1979年。从其功能上看,Modbus就是一种现场总线,现在它已经成为一通用工业标准,在工业生产和控制的各个领域得到了广泛应用[3]。
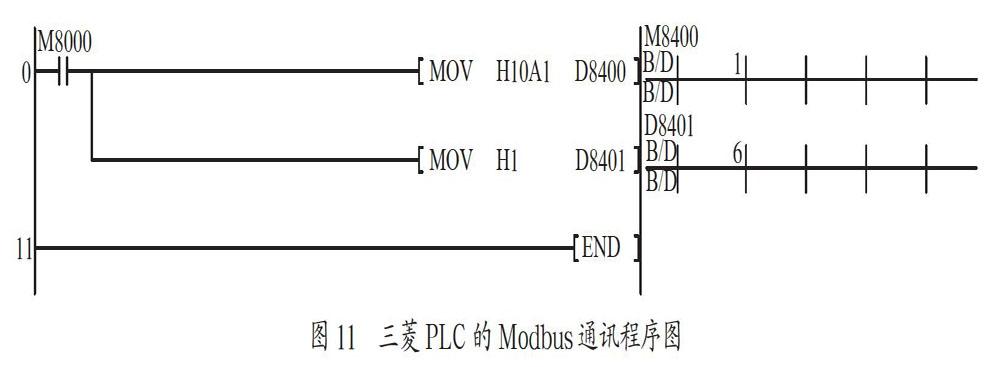
信捷视觉相机支持Modbus-RTU的通讯方式,通讯串口标准为RS-485标准;校验方式为无校验;停止位为1位;通讯波特率38 400;数据位长度8位。为了实现PLC与光源控制器之间的通讯,需要将两台设备使用协议设置相同。首先,设置D8400特殊寄存器,根据光源控制器协议格式,需要将D8400中第0位设置为1;第1位和第2位都设置为0;第3位设置为0;第4位到第7位设置为0、1、0、1;第12位设置为1。然后设置D8401特殊寄存器,D8401中第0位设置为1;第4位设置位0;第8为设置为0。那么,D8400和D8401中的数据分别是0B0001000010100001和0B0000000000000001,将它们转化为16进制后分别为0X10A1和0X0001。那么我们就需要将这两个数据写入三菱PLC当中,来完成三菱PLC的协议设定。三菱PLC的Modbus通讯程序图如图11所示。
7 结 论
本文中所提出的多协议网络化智能立体车库系统,为我国越来越严重的停车难的问题,提供可靠可行的解决方案。借助PLC和MCGS触摸屏来控制系统的运行,又增加了很多个性化定制模块可以更具用户的需要来进行个性化的定制。并且还包增加了语音播报等其他扩展功能,增加了用户的使用体验。
参考文献:
[1] 蒋思中,刘东海,白雪.PLC控制系统设计、编程与调试(三菱) [M].北京:北京理工大学出版社,2018:5.
[2] 黄文浩,陶丽萍.CC-Link通讯在混料罐PLC控制系统中的应用 [J].科技风,2018(34):149+157.
[3] 方清城,华路光,罗中良.PLC网络控制系统的研究 [J].机床与液压,2009(7):168-170.
作者简介:于国健(1998—),男,汉族,江苏扬州人,研究方向:电气自动化技术;陶丽萍(1983—),女,汉族,江苏常州人,讲师,毕业于江南大学,工学硕士,研究方向:智能控制技术。
