基于机器视觉的带式输送机带速检测方法的研究
2020-08-12刘莉莉苗长云
刘莉莉,苗长云
(天津工业大学电子与信息工程学院,天津 300387)
0 引言
带式输送机是一种现代化生产中连续运输设备,具有运量大、运距远、能耗小、运费低、效率高、运行平稳、装卸方便、适合于散料运输等优点,与汽车、火车一起成为三大主力工业运输工具,已被广泛应用于煤炭、矿山、港口、电力、冶金、化工等领域[1-2]。
为了保证带式输送机安全运行,监测带式输送机的打滑、超速等运行状态以及调速控制,需要检测带式输送机的带速。目前常用的带式输送机的带速检测方法采用接触式滚轮速度传感器检测带式输送机的带速,接触式检测易损坏、可靠性差,并且易划伤输送带;滚轮打滑、跳动或滚轮表面粘有物料周长发生变化,带速检测准确性差。
本文针对带式输送机带速检测方法中存在可靠性和准确性差等问题,提出了一种基于机器视觉的带式输送机带速检测的方法,提高了带速检测的精度、速度和可靠性,在煤炭、矿山、港口、电力和化工等领域具有广泛的应用前景[3]。
1 基于机器视觉的带式输送机带速检测设计方案
基于机器视觉的带式输送机带速检测方法如图1所示。对序列图像中每相邻两图像做基于特征粗匹配,利用随机抽样一致算法剔除误匹配点进行精确匹配,读取两图像精确匹配坐标,计算输送带平均像素位移。根据图像坐标系与世界坐标系的映射关系,得出图像中每像素所代表的物理尺寸,即得出输送带运行的实际位移与速度。
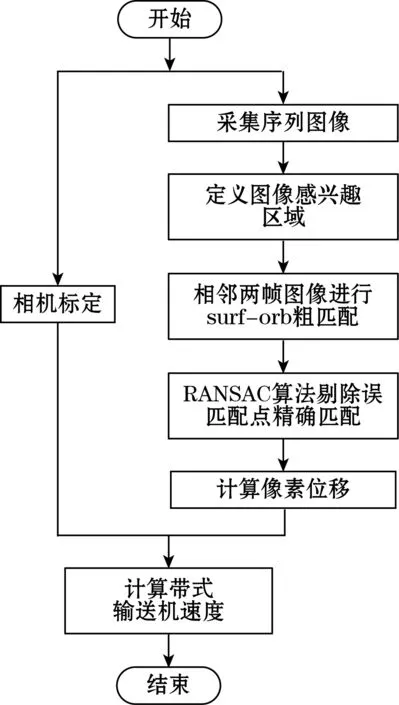
图1 带式输送机带速检测软件设计方案框图
2 相机标定
基于机器视觉计算带式输送机输送带的位移以像素为单位,若将像素单位转化为物理单位,则需对相机进行标定。相机标定分为线性标定与非线性标定[4],本文选用面阵CCD相机,镜头畸变较小,故可简化标定流程,选用线性标定方法。将相机垂直于输送带固定,在较短时间内,相邻帧图像受光照变化、运动状态等影响可忽略不计,每帧图像成像大小固定不变。根据针孔成像模型,二维图像尺寸与三维空间物体实际尺寸之间存在线性关系。设输送带上有2点A、B,在三维空间中对应其实际物理距离为d0(mm),在二维成像空间对应的像素距离为d1(pixel)。则d0、d1存在一定的线性关系,设参数k为二者的放大倍数,即
d0=kd1
(1)
相机标定的主要目的是获取k值,通过多次标定实验,获得k值,进而建立二维空间像面位移与三维空间实际位移之间的关系。
3 基于SURF-ORB算法的输送带上表面图像匹配算法
针对带式输送机输送带图像特征不显著、重叠区域不明显等缺点,提出一种适用于带式输送机图像的匹配算法,该算法结合了SURF算法检测特征点的稳定性、高效性与ORB算法快速的优越性。并通过定义图像感兴趣区域以加快算法运行速度。本文匹配算法大致分为4个部分:定义图像感兴趣区域、SURF特征提取、基于SURF特征点构建ORB特征描述、相似性度量。
3.1 感兴趣区域
感兴趣区域ROI是从图像中选择一个图像区域作为关注的焦点,图像从大图像变成小图像区域。由于相机视角FOV较大,每帧图像间存在无效区域,增加了图像处理时间。根据输送带图像特点,定义输送带图像特征显著部分作为感兴趣区域,仅对感兴趣区域特征匹配,缩减图像匹配搜索范围,显著地减少了图像配准的运行时间。
3.2 SURF特征提取
SURF具有很强的鲁棒性以及更高的运算速度,比SIFT算法快3倍以上[5],SURF是基于Hessian矩阵进行特征点检测。Hessian矩阵行列式局部最大值是图像特征点所在的位置。设图像I中的某点x=(x,y),在该点x处,尺度为σ的Hessian矩阵H(x,σ)定义为
(2)

Hessian矩阵行列式的极大值点处即为特征点,用盒状滤波器(Dxx、Dxy、Dyy)近似替代高斯二阶微分算子(Lxx、Lxy、Lxy)得到Hessian矩阵行列式为
det(Happrox)=DxxDyy-(ωDxy)2
(3)
式中ω为权值,用以平衡因近似所带来的误差,其值约为0.9。
为保证尺度不变性,通过建立图像堆,在每一层图像上应用不同尺寸大小的盒状滤波器模板得到滤波响应值,通过式(3)得到所有像素的Hessian矩阵的行列式,基于这些行列式找出特征点,首先选取阈值,去掉行列式值低的像素,保留最强的响应值。然后使用3×3×3模板在三维空间进行非极大值抑制,最后应用插值法找到亚像素精度的特征点位置。
3.3 基于SURF特征点构建ORB描述
SURF特征描述运用的是浮点数,通过欧式距离进行匹配,大量的浮点数运算增加了更大的内存开销,导致匹配时间长,耗费资源。为弥补这些缺点,二进制描述子被提出,二进制描述子采用二进制的特征向量,节省了大量的存储空间。ORB特征描述子便是一种二进制码串形式的描述子,经研究表明,其算法效率比SIFT快2个数量级,比SURF快1个数量级。计算速度上是SIFT的100倍,是SURF的10倍[6]。它的主要思想是图像特征点邻域可以用相对少量的灰度对比来表达,首先以特征点为中心定义一个大小为S×S(31×31)的补丁区域,在该区域内,以某种特定的方式选择nd个像素点对。然后比较每个像素点对之间的灰度值:

(4)
式中p(x)为在图像块x处的灰度值。
最后把补丁区域内所有点对的比较结果串成一个二值位字符串的形式,从而形成该特征点的描述符B:
(5)
当n=128、256、512时(通常选择256),在运算速度,空间占位和准确性上可以达到最佳效果。ORB中,为实现旋转不变性,使用了steered BRIEF算子,特征点邻域构成图像块的主方向为θ,其对应的旋转矩阵Rθ与以特征点为中心的邻域内的n对点集D为
(6)
旋转矩阵为
(7)
经旋转后得到新的点对Dθ=RθD,最终得到变换后的描述子为
fn(p,θ)=B(p)|(xi,yi)∈Dθ
(8)
3.4 相似性度量
经上述过程可知,图像中提取到的特征点由二值化的位符号串描述,用汉明距离测量两个描述符的相似程度,两个字符串按位进行异或操作,统计1的个数,该数即为两个字符串的汉明距离。其公式为

(9)
式中n为描述符的位数;x与y分别为两图像的某个特征点;x[i]和y[i]分别为特征点描述符的第i位。
通过设定阈值h(0.8),当相似度大于h时,代表匹配成功。由于基于汉明距离进行匹配可能存在误匹配,利用RANSAC算法[7]对粗匹配进行提纯,将正确匹配的点称为内点,错误匹配的点称为外点,该算法即是剔除外点的过程。通过找到一个最佳的3×3的单应性矩阵,获得两帧图像之间的坐标变换关系。其关系式为
(10)
式中:(x,y)和(x′,y′)分别为匹配图像与待匹配图像的特征点坐标。
单应性矩阵有8个未知参数,至少需要4个不共线的匹配点对。RANSAC算法具体步骤:
(1)随机抽取样本集中4个不共线的点对,计算变换矩阵H;
(2)利用变换矩阵H计算剩余匹配点之间的距离d;
(3)设阈值e,当d小于阈值则为内点,否则为外点;
(4)设定最大迭代次数N,当迭代次数大于N,则退出,否则,重复上述步骤。
4 带式输送机带速计算
对序列图像每相邻两帧图像进行精确匹配后,读取每个匹配点对的坐标,设有n个正确匹配点对,两图像对应的特征点坐标分别为(xi,yi)和(xi′,yi′),输送带的平均像素位移l为
(11)
设每两帧图像拍摄间隔为Δt,输送带速度为v,由相机标定结果可知输送带实际物理位移与像素位移的线性关系,则输送带速度计算公式为
(12)
式中k为相机标定中获取的放大倍数。
5 实验与结果分析
本文算法的准确性需进行实验验证[8],搭建实验环境,设置拍摄时间间隔为100 ms,采集带式输送机输送带上表面序列图像,进行实验,并将机器视觉测量的带式输送机速度与带式输送机监控系统终端传感器显示的速度作对比。重点分析图像匹配结果以及该算法测速的稳定性和可靠性。
5.1 图像匹配结果分析
经大量实验表明,本文算法可精确对输送带序列图像进行匹配。随机选取序列图像中的两幅图像,如图2(a)与图2(b),运用本文算法对输送带图像进行实验,匹配结果如图2(c)所示。

(a)带式输送机图像1

(b)带式输送机图像2
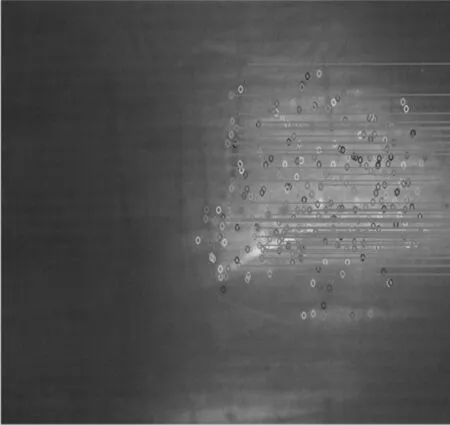
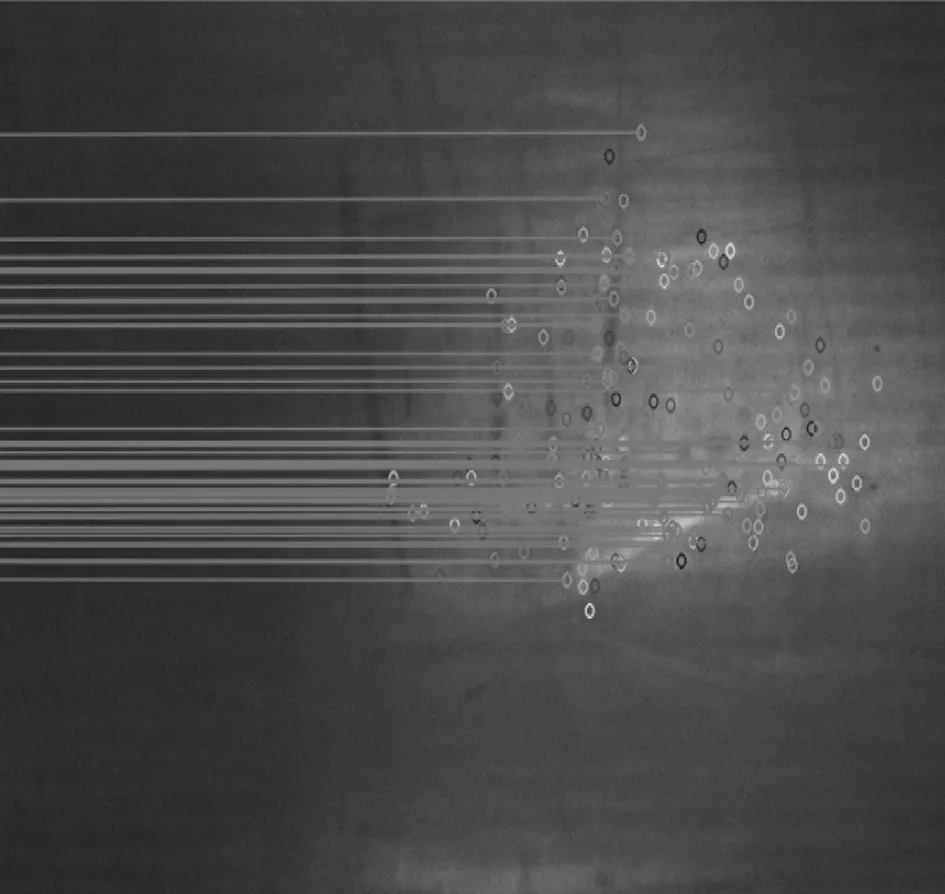
(c)本文算法匹配结果
将改进后的算法与ORB算法作对比,以图2(a)、图2(b)为例,匹配算法比较结果如表1所示,当ORB算法进行匹配时无正确匹配点对,本文提出的算法匹配结果有57对正确匹配点,且耗时与ORB算法相当。

表1 匹配算法比较
5.2 测速结果分析
本文选用面阵相机,对采集的3种不同速度下的序列图像进行实验。当带式输送机稳定工作后,采集运动的带式输送机输送带上表面图像,应用本文算法计算带式输送机带速,选取实验室带式输送机终端监控系统中传感器测量的平均速度作对比,计算其测速误差。非接触式机器视觉测速与传感器平均速度值对比如表2所示,基于机器视觉的测量方法与传统的速度传感器方法误差统计图如图3所示。
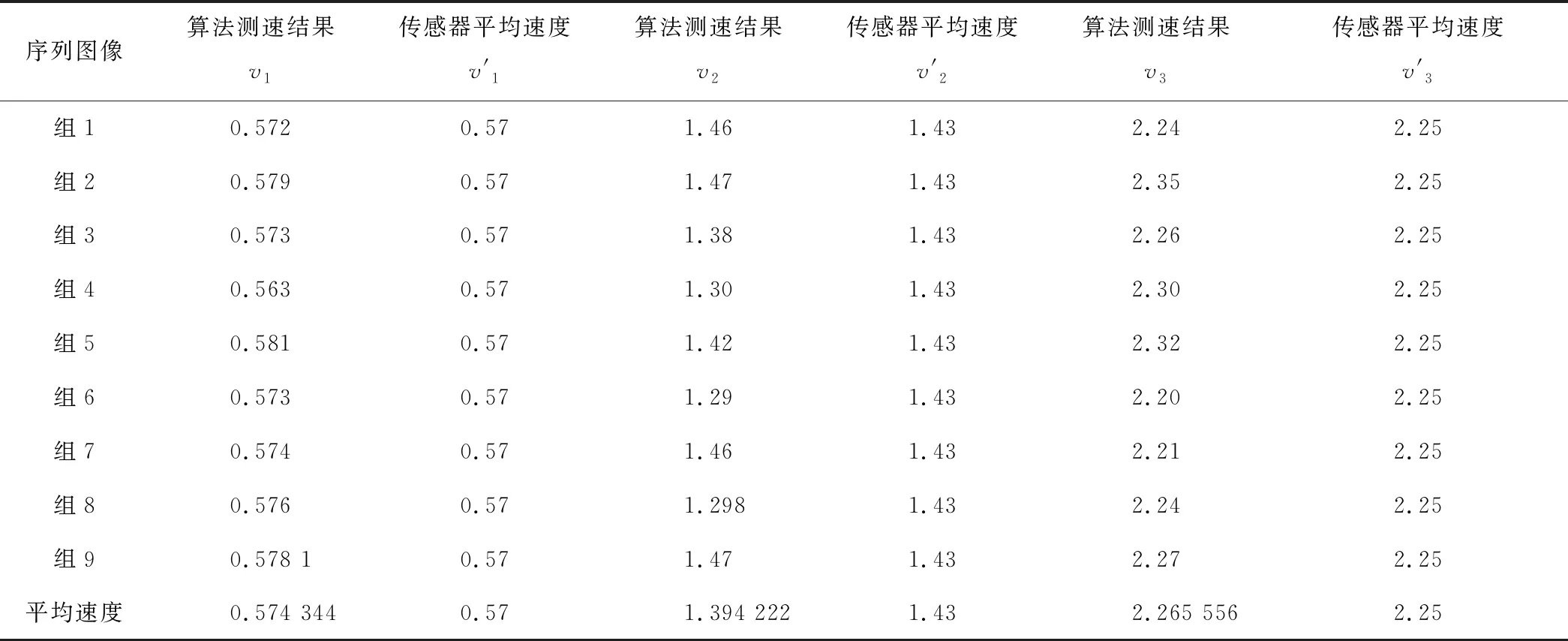
表2 机器视觉测速与传感器速度对比 m/s
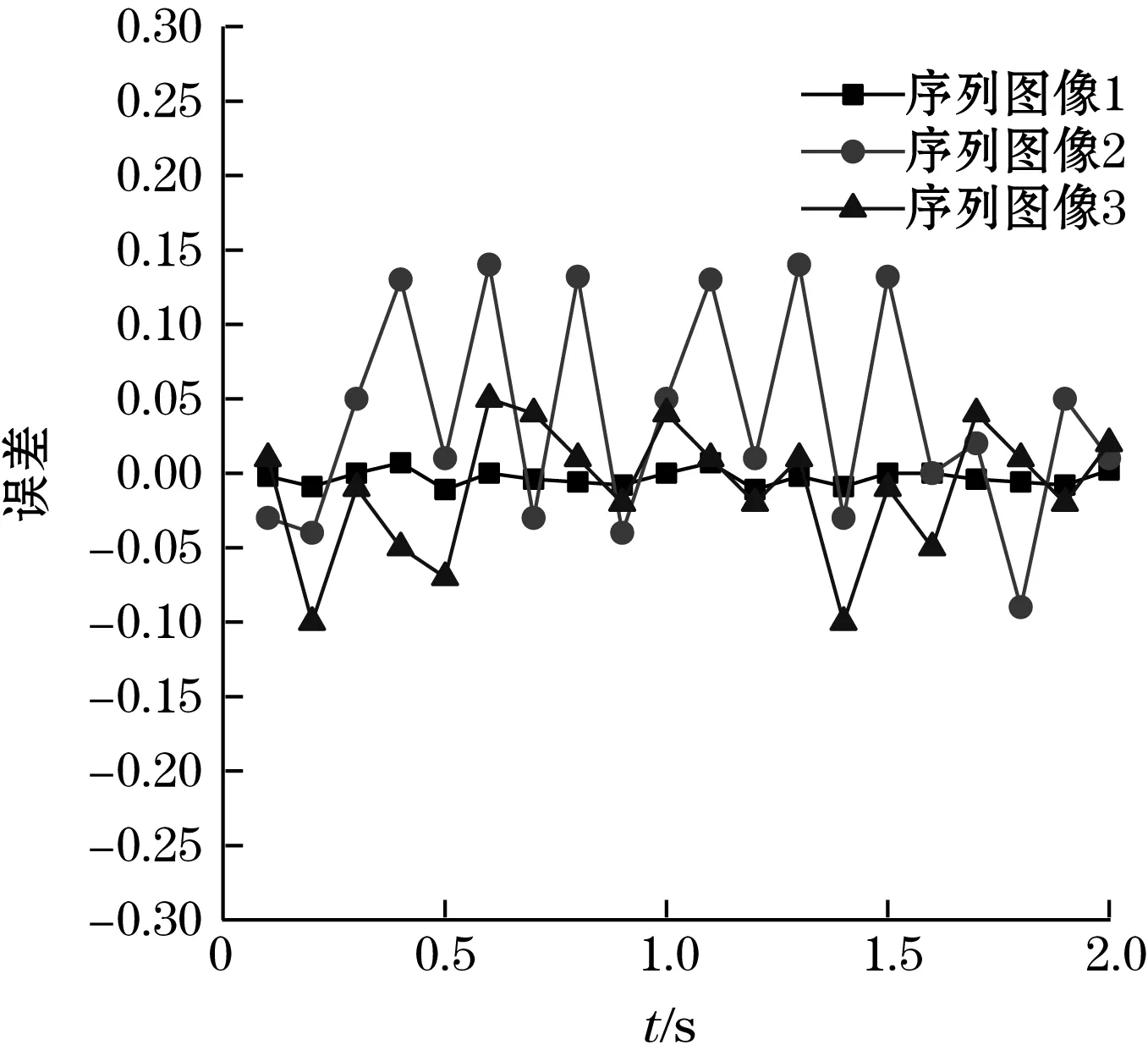
图3 本文测量速度与传感器显示速度的误差
由实验可知,表2选取的3组序列图像测量带速的平均误差分别是-4.344 、35.78 、-15.56mm/s。经多次实验验证,整体平均误差控制在-50~50mm/s之间。图3为传感器测量与机器视觉测量结果瞬时误差,在速度较大时,瞬时误差可控制在-0.2~0.2之间。在采集图像的过程中,两帧图像由于亮度差异等不可控因素导致匹配失败,使得测速结果误差较大,针对此问题,本文采用最小二乘法对测量速度进行拟合,将误测的速度剔除。综上所述,本文测速方法与传感器测速方法保持了较好的一致性,其稳定性与可靠性强于速度传感器,具有很高的精确度,弥补了传感器测速易受外界环境影响的缺陷。
6 结束语
对于带式输送机传感器测速的局限性,提出一种基于机器视觉的测速方法,该方法具有非接触式、不干扰带式输送机运行过程、精确度高等特点,充分利用带式输送机运行状态的连续性与序列图像成像特点,高精度计算出带式输送机的速度,通过理论分析与实验结果表明,该测速算法在输送带领域运用的可行性与可靠性,具有较好的实用推广价值。