旋翼无人机巡检220kV 直线塔的路径规划算法研究
2020-08-11蔡宗琦李宏杰陈芝茂
蔡宗琦 李宏杰 陈芝茂 鲁 磊 栗 瑞
(太原科技大学,山西 太原030024)
21 世纪以来中国经济出现井喷式增长。作为经济的晴雨表,社会的用电量也连年增长,导致电力线路被越来越多的架设。根据全国电力可靠性年度报告可知,近十年国家电网220千伏输电线路长度增加了2/3,致使传统的巡检方式出现了安全和效率相矛盾的问题。随着科技的发展,旋翼无人机以其优秀的性能被应用到电力线路巡检中,本文以电力线路中重要的支持部件——电塔为巡检对象。电力线路巡检中最重要的一个环节为路径规划,针对上述环节,采用蚁群算法来对电塔进行精细化巡检的路径规划。
1 220kV 直线塔的三维建模
根据电塔的国家标准及220kV 直线塔设计图在3D max 下对电塔进行三维建模[1-3],建模后的220kV 直线塔三维模型如图1 所示。
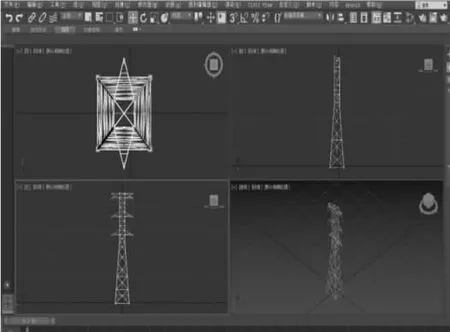
图1 电塔的三维建模图
2 监测点的确定
首先将3D max 下所建的直线塔转化为STL 格式,然后将其导入到MATLAB 中,如图2 所示,并对其进行离散化处理。其次根据表1 的旋翼无人机对电塔进行巡检时所需巡检的内容可以确定监测点的坐标[4]
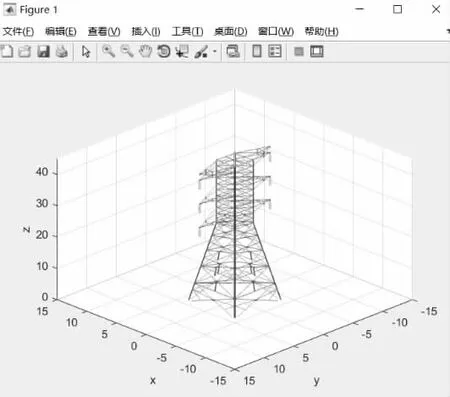
图2 电塔的导入图
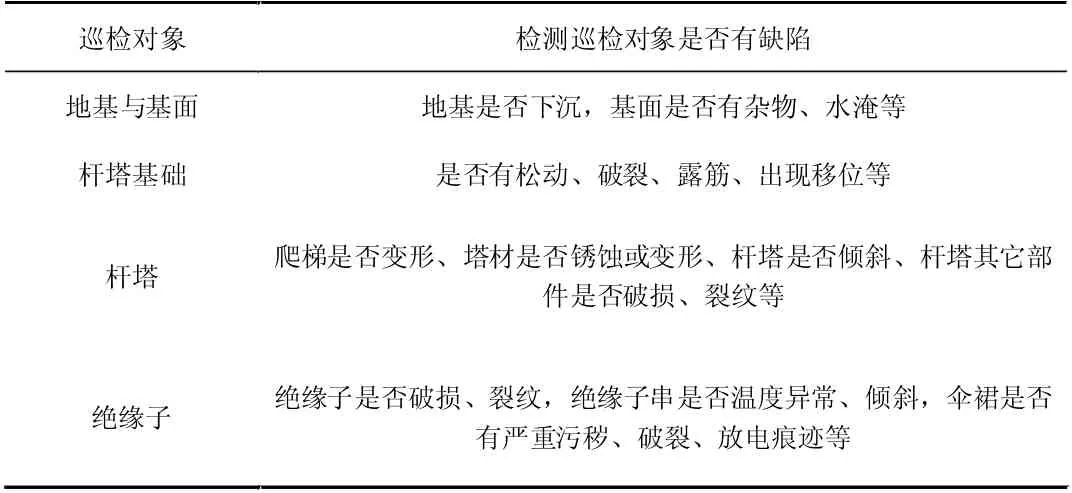
表1 架空线路多旋翼无人机巡检内容一览表
3 对220kV 直线塔进行路径规划
3.1 旅行商问题
电塔巡检的路径规划问题及为旋翼无人机需要经过每个监测点,并且每个监测点只经过一次,且最后的路径长度要求最短。因此可以将此问题转化为旅行商问题(Traveling Salesman Problem,TSP)。其数学模型为:
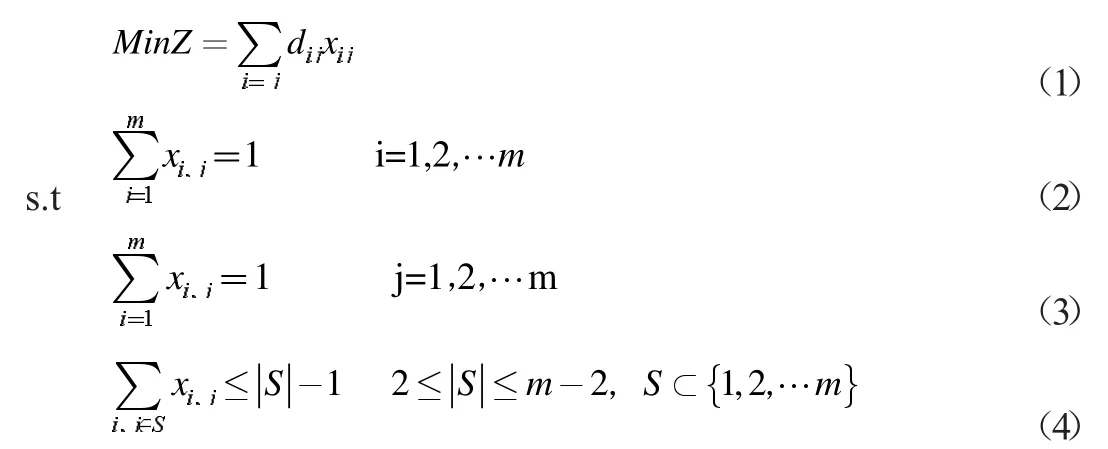
其中公式(1)表示TSP 问题的目标函数,要求遍历m 个城市,每个城市有且仅经过一次,并且走过的路程最短;(2)、(3)保证了商人只能经过每个城市一次;(4)表示禁止任何子回路解的产生。
3.2 基于蚁群算法的电塔路径规划
蚁群算法(ant colony optimization,ACO)作为仿生算法的一种,可以较好的解决TSP 问题。蚁群算法是受自然界中蚁群在搜索食物时可以在没有任何提示的情况下找到蚁穴到食物源的最短距离这一现象所启发而提出的。其原理为:每只蚂蚁会在其走过的道路中留下信息素,其余个体根据不同道路上的信息素浓度来决定选择哪条道路。假设每个蚂蚁的速度相同,那么短的道路上所经过的蚂蚁数量比长的道路上的多,导致短的道路上的信息素浓度较高,更多的蚂蚁选择这条短的道路,从而使短的道路上的信息素浓度更高,从而形成信息正反馈,以此来寻找最短路径[5-6]。蚁群选择下一个要去的地点的概率函数为:

所有蚂蚁完成一次循环后,信息素强度的更新公式为:

在MATLAB/2019a 环境下进行仿真实验,得到的仿真图如图3 所示。

图3 旋翼无人机对电塔巡检的路径规划
4 结论
首先通过对220kV 直线塔进行三维建模,并转为STL 格式导入到MATLAB 中进行离散化处理。其次根据旋翼无人机对电塔巡检的内容,确定所需的监测点三维坐标。最后将旋翼无人机对电塔巡检的路径规划问题转化为TSP 问题,并通过ACO 算法进行路径规划,从而生成最优巡检路径。
