中小型渔船通导设备集成系统设计
2020-08-11甘易明陈兆楠杨淑洁刘全良
甘易明,陈兆楠,杨淑洁,刘全良
(浙江海洋大学船舶与机电工程学院,浙江 舟山 316022)
自20世纪70年代开始,大型和远洋船舶通导设备便朝着集成化和自动化方向发展,随着科技发展,通导设备的种类不断增加,船舶驾驶难度也不断增加。为解决这一难题,高度自动化、智能化的船舶通导设备集成系统被广泛研究[1-4],如德国ATLAS、美国SPERRY、挪威NORCONTROL、意大利SELESMAR、英国RACAL等世界著名航海仪器厂先后推出的综合驾驶台都包含了综合导航系统。面向中小型船舶,尤其是中小型渔船的低成本通导设备集成系统在国内外尚处于起步阶段,国内一些学者前期对此也进行了一些研究,如:基于自动识别系统(AIS)的渔船航标管理以及避障系统设计[5-6];船舶导航数据信息融合处理技术的研究[7-10];渔船通导设备一体化、集成化的探究[11-14];基于C++Builder、YimaEnc的电子海图设计等[15-20]。
结合导航信息融合处理、电子海图设计、避障系统设计等研究,以中小型渔船为研究对象,通过调研分析各驾驶设备的性能,结合生产实际,针对中小型渔船各通导设备多处于单机单控状态,设备之间的信息联络依赖于人工操控,集成度、自动化程度低,设备的模块化、标准化、通用化差,使用维护烦琐等问题,重点突破通导设备集成技术、多源导航信息融合技术,研究符合中小型渔船生产需求的渔船驾驶设备集成系统,是当前迫切需要解决的技术问题,也是后续渔业船舶向智慧渔船发展的重要基础。
1 中小型渔船驾驶设备配备现状
根据对舟山某船舶设计院提供的船舶设计资料以及浙江舟山、宁波及周边地区的各类常见作业方式捕捞渔船和辅助渔船进行实船调研(2018—2019年),对调查的168艘不同生产类型中小型渔船的驾驶设备配备情况进行数据汇总。表1列举了目前舟山及其周边地区具有代表性作业方式的10条捕捞渔船和2艘渔运船的设备配备情况,图1为168艘渔船驾驶舱配置的主要通导设备情况(部分)。

表1 渔船通导设备调研表
中国近几年生产制造的渔船均依据《渔业船舶法定检验规则2017》[21]规定配备相应的通导设备,经调研的168艘渔船所配备的设备中,导航设备型号共有17种,其中全球定位系统GPS-180型导航设备78台占总数的46%;雷达设备型号共有13种,其中,FR-8062型雷达89台占总数的53%,M1831L型33台占总数的20%;自动识别系统(AIS)设备型号共有6种,其中SI-108型94台占总数的56%;甚高频无线电设备型号共有10种,其中,STR600D型50台占总数的30%,FT-805与FT-805B共计67台占总数的40%。由图1可见,通导设备种类繁多,集成度低。结合实船调研和渔民实际生产需求,表2为目前中小型渔船通导设备所配备的标准仪器及其常用功能,其中GPS、北斗一般只装载其一。这些通导设备一般都具有导航定位功能,具有较高的功能重复性;同时,北斗、GPS、AIS、雷达、甚高频无线电这5种设备在功能上也存在一定的互补性[22],但缺乏系统的功能集成。因此,研究具有高度综合功能的渔船综合导航系统(INS),显得尤为重要。
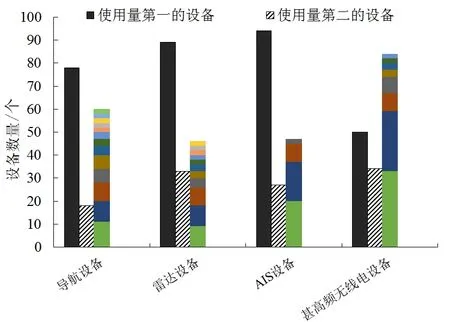
图1 168艘渔船驾驶舱通导设备配置基本情况
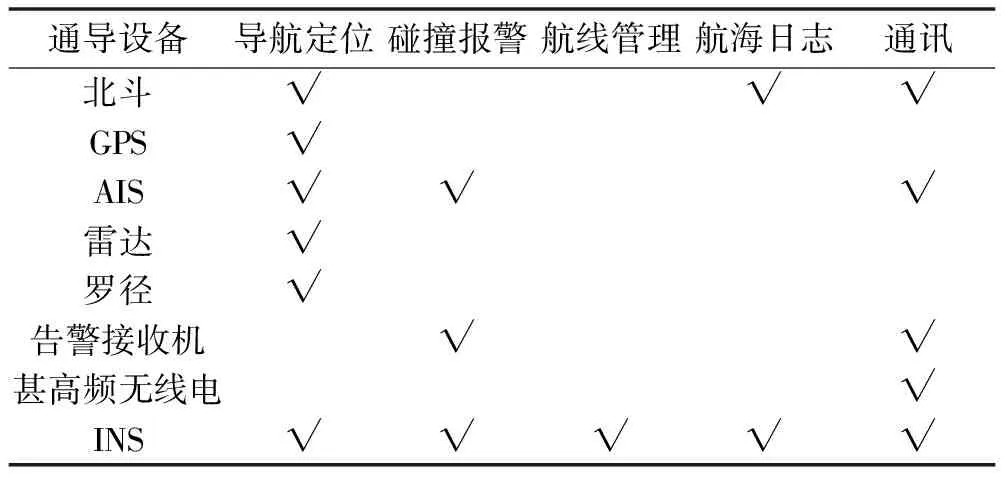
表2 通导设备主要功能对比
2 通导设备集成系统设计
2.1 集成系统框架
通导设备型号类别多,不同型号设备的操作界面存在差异,渔船驾驶台通常配备有多台相同或相近功能的设备,因此对设备进行系统集成显得很有必要。结合中小型渔船的生产需求,提出其通导设备集成系统,框架如图2所示。
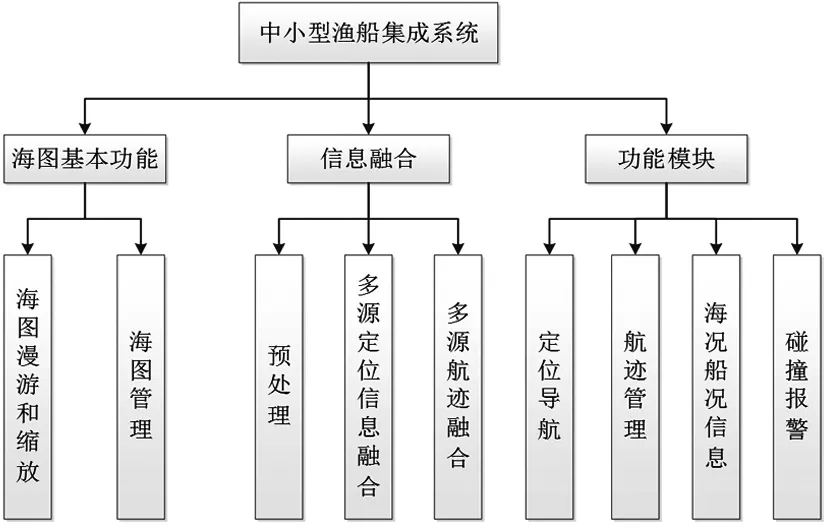
图2 集成系统框架
2.2 通导设备信息融合技术
通导设备集成技术的核心在于导航信息融合,即利用中央处理器(CPU)对不同时序的传感数据进行自动分析、优化处理,从而对信息最优处理[23-26]。所处理的导航信息具有不稳定的特性,因此集成系统根据不同传感器的时间、空间冗余和互补信息的优化准则合理调配和处理,从而得到与实际目标近似的数据。采用卡尔曼滤波技术中的分散化滤波法,将集中卡尔曼滤波器分化为多个特定传感器相关的子滤波器和一个主滤波器。这些子滤波器并行处理传感器数据,针对各子滤波器相应的局部进行估计,然后将这些状态信息集中传至主滤波器中,由主滤波器进行全局状态估计。动态系统信息模型及其协方差矩阵作为加权约束,可提高系统状态估计的可靠性,以此增强系统的容错性。
船舶综合导航系统多源信息融合的主要过程是对测量数据预处理以保证测量数据的有效性,通过对滤波后测量信息的融合得到更准确全面的船舶运动及环境信息。多源信息融合结构如图3所示。
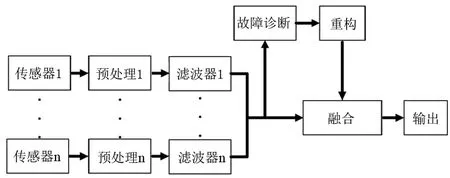
图3 多源信息融合结构框图
2.3 集成系统总体设计
参照现有的大型船舶综合导航系统,结合中国民用渔船的需求,拟定中小型渔船通导设备集成系统总体设计(图4)。系统硬件部分包括中央处理器、电源、系统输出模块、数据存储模块、人机交互模块和导航设备接口;软件部分主要包括传感器数据处理模块、管理和功能软件。
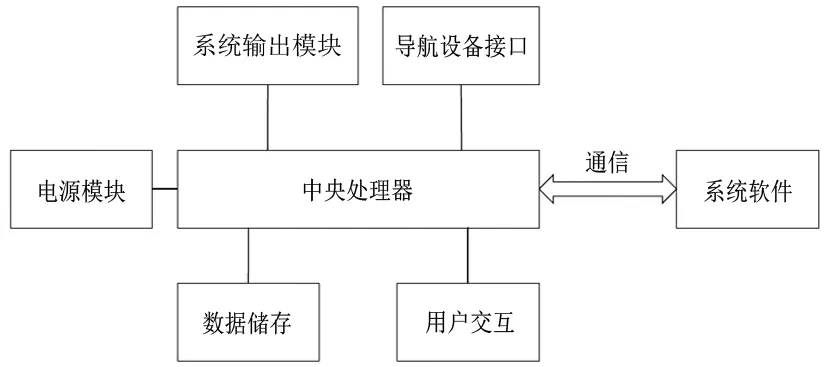
图4 集成系统总体设计框图
中央处理器接收传感数据后,配合系统控制要求对数据进行处理,最终把处理结果传至输出设备。主要处理内容包括:导航数据的优化滤波,航速数据的处理与显示,水深数据的处理与显示,雷达信号数据处理,AIS导航信息处理等。
2.4 集成系统功能模块设计
采用局域网(LAN)总线和控制器局域网络(CAN)总线构成系统内部局域网,所有传感器通过专用的数据采集单元连接到局域网上。数据采集单元作为从串口到局域网的数据桥,用于从串口到LAN或者从LAN到串口的导航传感器数据的收集和分发。综合导航系统中显示的信息均是在收集以下来源并传输、综合处理的结果,包括:GPS、北斗、罗经等设备的导航信息,雷达的目标信息,AIS的船舶动态、静态和航线等相关信息,状态监控及报警信息等。集成系统拓扑结构,如图5所示。
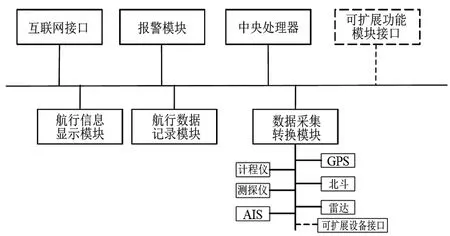
图5 系统拓扑结构图
3 通导设备集成系统功能实现
3.1 YimaEnc及MFC的应用
本系统以YimaEnc为基础,利用MFC编程技术实行二次开发而成。MFC是用于开发图形用户界面的类库,开发平台为Visual Studio,通过调用API实现所需功能;MFC中包含大量Windows句柄封装类和Windows的内建控件和组件的封装类,MFC界面运行效率高,适合对数据处理速度要求高的系统。结合中小型渔船通导设备集成系统的实时性功能需求,本系统选择数据处理速度较高的MFC编程技术。
YimaEnc是基于YimapCore开发的应用于电子海图领域的GIS引擎,具备业界领先的刷新显示效率和海图动态加载速度,其利用了YimapCore开放的设计架构,具有易扩展和升级的优点[27]。因此,用MFC封装所有API的二次开发组件包进行系统界面搭建,在程序中调用组件提供的API对电子海图进行操作;另外,YimaEncSDK可与GPS、AIS、雷达等系统结合,实现渔船的定位、导航、避碰及航迹记录等功能,能基本满足渔船通导设备集成系统的界面设计要求。
3.2 集成系统主要功能
(1)基本信息显示。通过主界面体现,实时显示本船的航行位置、航速航向、当前位置水深以及地图比例尺等航行基本信息。系统主界面如图6所示。
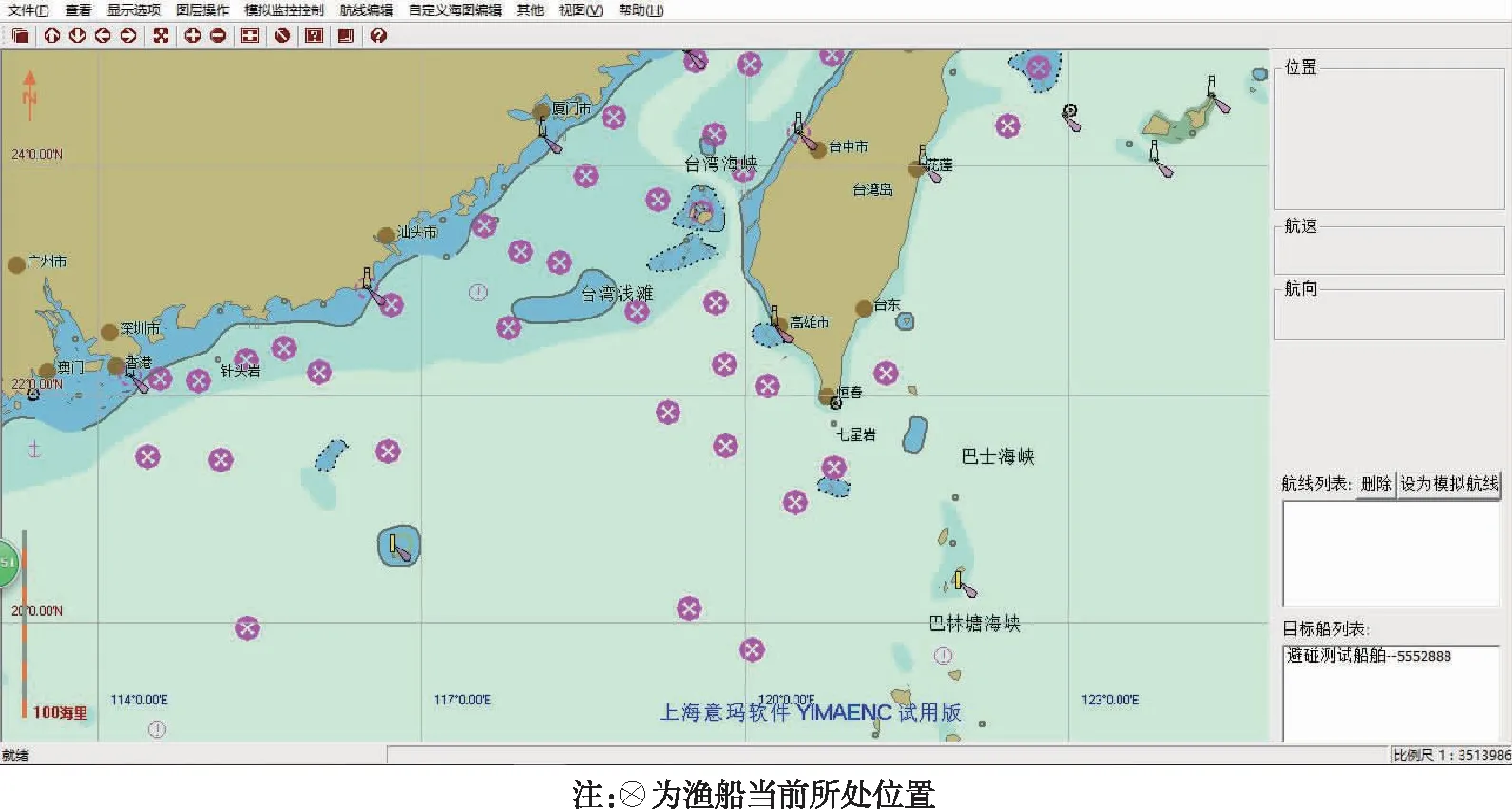
图6 系统主界面
(2)电子海图设置。自定义海图显示项目,如显示指北针、设置经纬网格、显示传统纸海图符号等;实现对海图图层操作和图层管理,分为S57、S63和VCF图层管理。
(3)航线编辑。在航线编辑模式进行航线规划,可添加和删除多个航路点,通过添加的航路点设置航线,编辑航线数据后可设为模拟航线。在航线列表中可存储多条航线,便于航行过程中选择。
(4)避碰计算。利用AIS实现船舶航行状态的自动识别、收发和监测,利用GPS、电罗经、计程仪等传感器获得本船的定位信息和航速航向,根据定位信息和航速航向计算出两船会遇时最近会遇距离DCPA和最小会遇时间TCPA,依据DCPA和TCPA的值判断两船是否存在碰撞危险。
3.3 集成系统功能实现
3.3.1 显示模块
显示模块是人机交互的主要部分,是系统基础组成部分,分为菜单栏、电子海图和信息栏,菜单栏包括图层操作、航线编辑等,信息栏包括位置、航速、航向、航迹列表等。采用MFC进行主界面窗口布局,根据系统需要向窗口中添加YimaEnc的CYimaEnc类和成员变量;以位置信息为例,调用classCNavigationDlgBar中的voidShowNavigationInfoText()显示定位信息。
3.3.2 电子海图模块
电子海图模块的主要功能是把本船位置、所处静态环境、动态目标信息集成显示在屏幕上,使船员能够快速获得所有航行信息,辅助做出有效决策。电子海图模块基本功能包括移动、漫游等。为提高模块的实用性,同时判断鼠标事件和按钮事件,按钮事件是在MFC菜单框架上添加各功能对应按钮,通过点击按钮可实现海图基本功能。电子海图模块还包括图层操作,其作用为切换底图或显示隐藏底图物标。
3.3.3 航线编辑模块
航线编辑模块用于渔船辅助生产,船员根据实际生产经验和渔场信息确定多个航路点,利用这些航路点设置航线,生成模拟航线后储存到航线列表中。依据生产需要预设航路点生成的模拟航线,在程序中利用CNavigationDlgBar类来实现。考虑操作细节需要定义较为全面的操作集合,主要包括:
voidCNavigationDlgBar::ClearDlgContents()
//清空数据内容。
voidCNavigationDlgBar::RefreshRouteList()
//刷新航线列表。
voidCNavigationDlgBar::RefreshVesselList()……//刷新船舶列表。
voidCNavigationDlgBar::OnSetNavRouteButton()
//设置模拟航线。
voidCNavigationDlgBar::OnDelRouteBtn()
//删除航线。
以上操作集合体现了航线编辑模块的基本功能,包括航线设置、删除等功能,具体操作通过内部数据列表进行,航线和船舶信息储存在航线内部数据结构列表中。
3.3.4 避碰模块
避碰是船舶安全作业的核心部分,是渔业安全生产的重要保证,根据文献[21]的规定自动识别系统船载终端(AIS)是强制安装的避碰设备。系统中的避碰模块首先依据AIS获得目标船的实时定位坐标、航速、航向,利用GPS、电罗经、计程仪等传感器获得本船的定位信息和航速航向,将其作为输入参数,结合船舶避碰决策算法,得出两船会遇时最近会遇距离DCPA和最小会遇时间TCPA,根据DCPA和TCPA判断两船是否存在碰撞的危险。
在船舶避碰决策算法的程序中,利用YimaEnc的CGetDcpaTcpaDlg类的实现功能,依据DCPA和TCPA可直观预知船舶碰撞的可能性,辅助船员做出避碰决策,极大提高渔船驾驶的安全性。
4 通导集成系统特点与后续工作
基于中国目前中小型渔船通导设备配备标准和实船配备情况,分析通导设备的功能重复性和可集成性,同时参考国内外应用于大型船舰的综合导航系统的设计方案,提出符合中小型渔船特点和需求的低成本通导设备集成系统设计方案。完成对中小型渔船通导设备集成系统的综合显示界面的设计,应用S-57国际标准电子海图和Visio Studio开发环境及YimaEnc海图引擎开发组件进行系统设计,创建渔船通导设备集成系统显示界面,融合北斗、GPS、AIS和雷达的导航信息,实现导航信息显示、电子海图设置、航线编辑、避碰计算等功能。
本系统集成了位置、航向、速度及周边目标等各种航行安全相关的数据,便于船员使用,开发成本较低,符合中小型渔船的特点和需求。但该系统还不够成熟,显示界面还不够完善。需完善的内容有:1)实船调研数据不够全面,需收集浙江省及周边省市以外的实船数据,更全面地探讨国内中小型渔船通导设备集成的可行性和预期效果。2)提出的多源定位数据融合处理方法虽提高了船舶定位精度,但由于实船用于定位的导航设备不只是AIS和雷达,需要输入更多设备的定位信息融合,从而进一步提高导航精度。3)集成系统显示界面仅初步实现导航界面的显示,仍存在诸多不足,模块功能方面也需完善。因此,尚需对系统的界面进行优化,使之更美观、更合理,提高易用性。
5 结论
在YimaEnc海图引擎基础上利用MFC编程技术进行二次开发,创建通导设备集成系统显示界面,融合北斗、GPS、AIS和雷达的导航信息,实现导航信息显示、电子海图设置、航线编辑、避碰计算等功能,完成了中小型渔船通导设备系统集成的初步探索。利用该技术有利于快速开发符合中小型渔船生产需求的集成系统,是渔船驾驶设备集成系统开发的有力工具;通过集成系统的研究,致力于减少驾驶台设备,降低操作难度,辅助船员完成驾驶决策,提高渔船生产驾驶安全性。提出的基于目前中小型渔船现有通导设备各功能模块通过多源信息融合技术、软件界面集成等为核心的通导设备集成解决方案,在船舶电子设备集成和智能化发展中做了初步探索。渔船驾驶设备集成化是推动船舶智能化发展的重要基础,对智慧渔船、智慧海洋的发展有着重要意义。
□