Honda模型在前车紧急制动场景下的碰撞风险分析及优化
2020-08-10刘海峰
刘海峰

摘 要:基于傳统的安全距离模型——Honda模型,考虑了前车在自车自动紧急制动功能触发时刻突然制动的情况,分析了Honda模型在避撞功能上的风险;引入驾驶员一般的跟车距离特性,提出了新的安全距离模型;建立了CarSim+Simulink联合仿真模型,用于测试新的安全距离模型的避撞效果,结果符合预期。
关键词:安全距离模型;自动紧急制动;联合仿真
1 研究背景和意义
当前,为了减少交通事故数量、减少拥堵、减少排放、增加驾驶员可用时间,新的汽车技术大都朝着自动驾驶(Autonomous Driving,AD)领域发展。作为自动驾驶关键技术之一的自动紧急制动(Autonomous Emergency Braking,AEB),就是各企业和科研机构不遗余力研究和完善的方向。Euro NCAP研究表明[1],AEB可以避免27%的碰撞事故。奔驰汽车公司通过对各类交通事故进行研究后表明,如果驾驶员相比发生事故时可以提前1s意识到碰撞危险并采取避撞措施,则可以避免90%交通事故[2]。AEB系统的作用就是通过自动紧急制动将碰撞事故扼杀在发生之前。
已有的研究基本上都是假设AEB全制动触发后,前车运动状态不发生改变,没有看到有考虑自车AEB全制动触发后前车由匀速行驶突然制动对避撞带来的影响。因此,本文通过经典安全距离模型——Honda模型[3],来对这一影响进行分析并进行优化。
2 Honda安全距离模型
Honda安全距离模型的制动安全距离由以下公式得出:
Honda模型的制动安全距离随自车车速及两车相对车速的关系如图1所示。
该模型在前车低速时采用两车的最大减速度来计算制动安全距离;在前车较高车速时,考虑前车当前的车速值来计算,并未考虑前车可能采取的减速度。Honda模型倾向于较短的制动安全距离,相对比较激进。这样设定模型的目的在于,给足驾驶员可能采取避撞措施的空间,尽可能不提前对车辆进行干预。
3 碰撞分析
根据Honda模型的参数[4]设计,取两车的最大减速度α1,α2均为-7.8m/s2,刹停时安全车距为ds=1m,系统延迟时间t1=0.5s,制动时间t2=1.5s。
如果不考虑前车可能有的制动操作,Honda模型下两车的碰撞速度分布如图2(a)所示;考虑在自车AEB触发情况下前车突然紧急制动,两车的碰撞速度分布如图2(b)所示。两种情况下碰撞速度的对比图如图2(c)所示。
从图2(a)中我们可以看出,原有的Honda安全距离模型在不考虑前车突然制动情况下能够避免大部分行驶工况的碰撞,仅仅在自车车速较高(>75km/h)且相对车速也较高(>85km/h)的行驶工况下会出现碰撞,碰撞的最高速度能达到约45km/h;若考虑自车AEB触发时前车的制动情况,我们可以从图2(b)中看到在自车车速较高时大部分工况都不能完全避撞,最大碰撞速度约为45km/h。
4 Honda安全距离模型的改进
显然我们如果要规避自车AEB触发时前车突然紧急制动的风险,就需要对已有的安全距离模型进行适当的调整。根据某车型2696公里的道路测试数据,由五名经验不同的司机共同完成,提取出一般驾驶员在跟车状态下采取制动措施时的两车相对纵向距离随车速的关系。
对所有距离点进行最小二乘回归得到一条跟车距离关于车速的回归线(如图3中绿色线):
这条回归线将作为调整安全距离模型的参考,认为系统设定的安全距离如果大于回归线对应车速的安全距离,则表现为提前干预驾驶员的正常操作,若小于关系线得到的安全距离,则可能制动过晚威胁到驾驶员的安全。
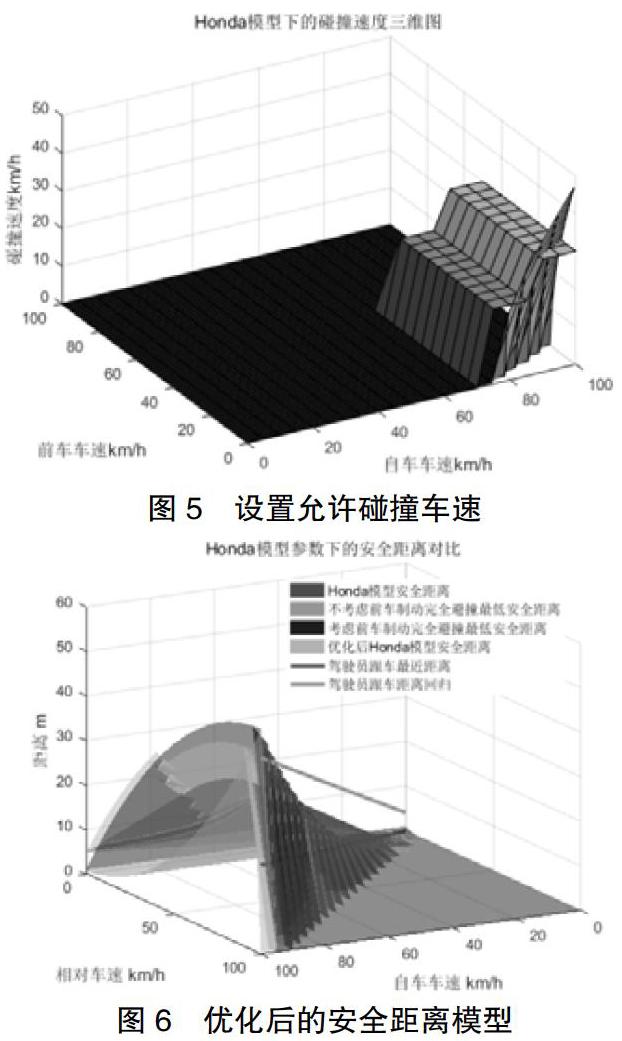
如图4所示,对Honda模型进行分析,红色面为Honda安全距离模型,绿色面为不考虑自车AEB触发时前车制动情况下的最低安全距离,从这两个图可以看出,Honda模型在较低相对车速工况下留有一定的安全余地,而在小部分的较高相对车速工况下,允许了一定的碰撞。如果不考虑自车AEB触发前车制动情况,它能在保证驾驶员安全和不过多干预驾驶员正常操作上做到一个较好的平衡。但如果考虑了前车突然的制动情况,完全避撞所需的最低安全距离如图4中蓝色面所示,不难看出,在自车车速较高的情况下很大范围内Honda模型都无法有效避撞。因此我们需要对安全距离模型进行一定的优化,优化的目标为:在自车AEB触发时前车突然全制动情况下,自车高速行驶时两车的碰撞速度低于30km/h,自车低速行驶时则能够完全避撞。图4中的绿色直线为驾驶员跟车距离的回归,优化后的安全距离要尽量以此为边界。
为了更好地优化安全距离模型,我们先设置好允许的碰撞速度(如图5),最高允许碰撞车速不超过30km/h,大部分行驶工况下能够完全避撞,然后反推出优化后的安全距离(如图6青色面)。
5 Simulink-CarSim联合仿真
搭建AEB系统仿真模型,Simulink中返回制动主缸压力与四个车轮的转矩,作为CarSim的输入,然后输出特定测试条件下相对纵向距离、相对车速、两车车速等。联合仿真模型如图7所示。
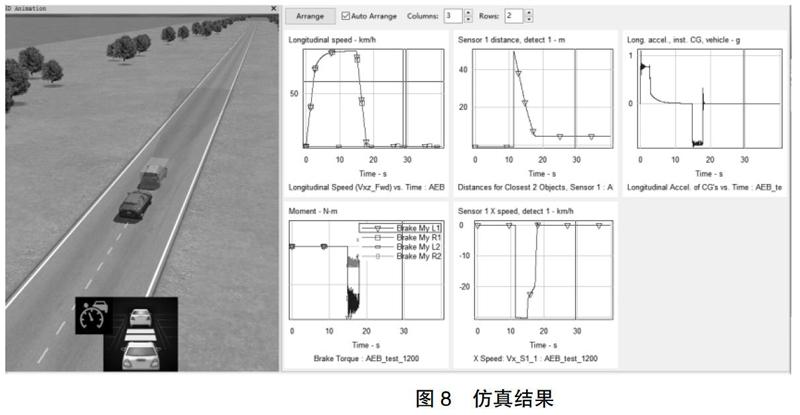
选择自车车速为90km/h,前车车速为60km/h的场景进行仿真测试,设置的碰撞速度为0km/h,由优化后的安全距离模型得到相应的AEB触发距离为25.102m,在CarSim中设置好前车的行驶参数。前车与自车的制动减速度均取-7.8m/s2,测试结果为成功避撞(如图8所示)。两车的车速变化如图9所示。
6 结论
传统的安全距离模型往往很难找到安全性与舒适性的平衡点。本文在Honda模型的基础上,通过分析自车AEB触发时,不考虑和考虑前车制动带来的碰撞影响。发现Honda模型在自车车速较低时能够避撞,在自车车速较高时不能做到完全避撞,且碰撞速度为45km/h左右,对特定行驶场景下的安全带来了较大的威胁。对此,考虑了自车AEB触发时前车突然紧急制动的情景,优化了原有的模型,得到了一个新的距离模型。新的模型符合驾驶员的跟车距离特性,从而提高了安全性的同时也能保证不过早干预驾驶员。通过Simulink和CarSim联合仿真,自车以90km/h的车速、前车以60km/h的车速匀速行驶时,考虑自车AEB触发时前车突然紧急制动,仿真结果显示避撞。
参考文献:
[1]Euro-NCAP.Test Protocol-AEB systems Version 1.1[R]. 2015.
[2]H.H.Mernel.Applications of Microwaves and Millimeterwaves for Vehicle Communications and Control in Europe[J].IEEE MTT-S,1992:609-612.
[3]Fujita Y,Akuzawa K,Sato M.Radar brake system[J].JSAE Review,1995,16(02):219.
[4]Peter Seiler,Bongsob Song,J.Karl Hedrick.Development of a collision avodiance system[J].Journal of Biosystems Engineering,2(25):145-150.
