基于移动互联网技术的辅助监理机器人设计
2020-08-07霍海锋包尔恒
霍海锋 包尔恒

摘 要:建筑监理行业对重点工序的监控主要采用人工旁站记录的方式,工作强度大且容易产生懈怠心理导致监控不到位。研发一种基于移动互联网技术的服务型机器人,通过WIFI及3G/4G通信方式保证现场监控数据的有效传输,将视音频信号实时推送到授权人员移动终端,实现对施工现场重点工序不间断监控,以及施工过程监控录像可回溯。机器人采用不间断电源系统实现无外接电源的长时独立工作。数字直传遥控技术实现机器人在工程师控制下自主移动至监控点。该类机器人可减轻现场监理工程师的体力劳动,提高工作效率和可靠性。
关键词:移动互联网技术;服务型机器人;WIFI;3G/4G;移动终端;辅助监理
中图分类号:TN919.85;TP242.6文献标识码:B
Design of Robot Aided Supervision Based on Mobile Internet Technology
Huo Haifeng Bao Erheng
Department of Automation Engineering,Guangdong Polytechnic of Water Resources
and Electric Engineering GuangdongGuangzhou 510925
Abstract:Onsite supervision with human is used currently in the key procedure of construction supervision,this method leads to hard work and slack psychology which may cause the lack of supervision.A kind of service robot based on mobile internet technology is designed.By using WIFI and 3G/4G communications,supervisory data are transmitted effectively.Video and sound are pushed realtime to mobile terminals of authorized persons.This helps to realize uninterrupted supervision for the key courses onsite,and review of the video records.The robot with mobile uninterrupted power system can work independently for a long time without external power supply.Digital direct transmission allows engineer to remote control the robot to the supervisory spot.This kind of robot can reduce the physical works,and help the improve the efficiency and reliability.
Key words:mobile internet technology;service robot;WIFI;3G/4G;remote terminal;aided supervision
在傳统的建筑施工现场行业,通过引进先进的信息技术,如BIM技术、无人机、智能硬件等,与现场一线业务深度融合,提高现场岗位作业和管理效率,进而解决数据采集的真实性和及时性问题[1]。然而,目前监理行业仍然主要采用以人员驻场,对重点工序、部位进行巡查、旁站的工作方式,不仅需要大量的监理人员,而且监理人员即使经常巡查工地,也不能保证24小时不间断实时监控现场。
为了提高工程监理质量,减轻监理工程师工作强度,本文介绍基于移动互联网技术的机器人设计,通过集成远程监视、数据采集与传输、移动互联APP程序实时监控等技术,辅助现场监理工程师对施工现场进行24小时不间断监控,并且能做到监控过程可回溯,为事件处理提供翔实证据。
1 施工现场监理特点及视频监控系统的不足
根据规范要求,工地现场要求有视频监控管理系统,在工地出入口、办公区域、材料堆放区域等重点区域安装摄像头,用于施工现场的安防管理。传统的管理模式和视频监控系统有一定不足之处。
1.1 施工现场监理的工作特点
当前建筑监理行业对施工现场的管理,采用的是总监理工程师配备若干专业监理工程师派驻现场的方式。专业监理工程师需要经常深入施工现场进行巡查,检查施工过程中的安全、质量工作。对于重点部位的施工、关键工序、隐蔽工程等重要施工环节,专业监理工程师还需要旁站,监督其施工过程,避免出现违反操作规程,影响工程质量的情况。因此,专业监理工程师的工作强度比较大。另外,对于一些需要连续作业的重点施工过程,要求旁站的时间较长,难免使人产生懈怠心理,监控不到位。
1.2 视频监控系统的不足
现有的建筑工地视频监控系统比较成熟,基本采用固定机位+有线网络,即使采用无线WIFI形式,其接入范围也是小于50米。常规的建筑施工现场视频监控系统的不足:(1)现有建筑工地视频监控系统监视灵活度小。一般此类视频监控系统采用商用摄像头,固定机位安装,有线连接及传输,监控点固定。对于随着工程进度变化的区域不一定监控到位。(2)人机交互方式单一。此类系统大多采用视频信号直接采集存储于视频录像机,再显示到监控屏幕。(3)信号接入方式不够多样。此类系统大部分使用有线直连、局域网连接方式,使用WIFI接入时需要使设备处于WIFI信号覆盖区。(4)设备供电不够可靠。施工现场在建设中前期一般都是临时电源,并且电力线路很多也是临时搭建,导致设备的供电可靠性不高。
1.3 施工现场的其他情况
施工现场临时设施多,大多数施工通道是临时搭建,工作区域灰尘较大,作业范围狭小,各工种交叉重叠情况经常发生。因此施工现场防尘、防雨、防碰撞的要求会比较高。
2 基于移动互联网的辅助监理机器人设计
通过对施工现场监理要求、现有监控系统及环境深入分析,本文提出基于移动互联网技术的辅助服务机器人设计方案。(1)多种人机交互接入方式;(2)低照度红外高清一体摄像机,3G/4G+WIFI双模传输图像;(3)设计不间断电源供电模块;(4)履带底盘承载高防护等级机身。
2.1 机器人硬件功能
辅助监理機器人主要由核心控制系统、高清一体摄像机、不间断电源系统、遥控驱动系统等四部分组成。核心控制系统实现视音频数据处理、存储及多通道通信;高清一体摄像机实现高清视频监控以及低照度红外照射;移动不间断电源系统实现整机稳压、变压与直流供电;遥控驱动系统实现机器人在操作人员直接数传或3G/4G远程遥控指挥下灵活移动[2]。
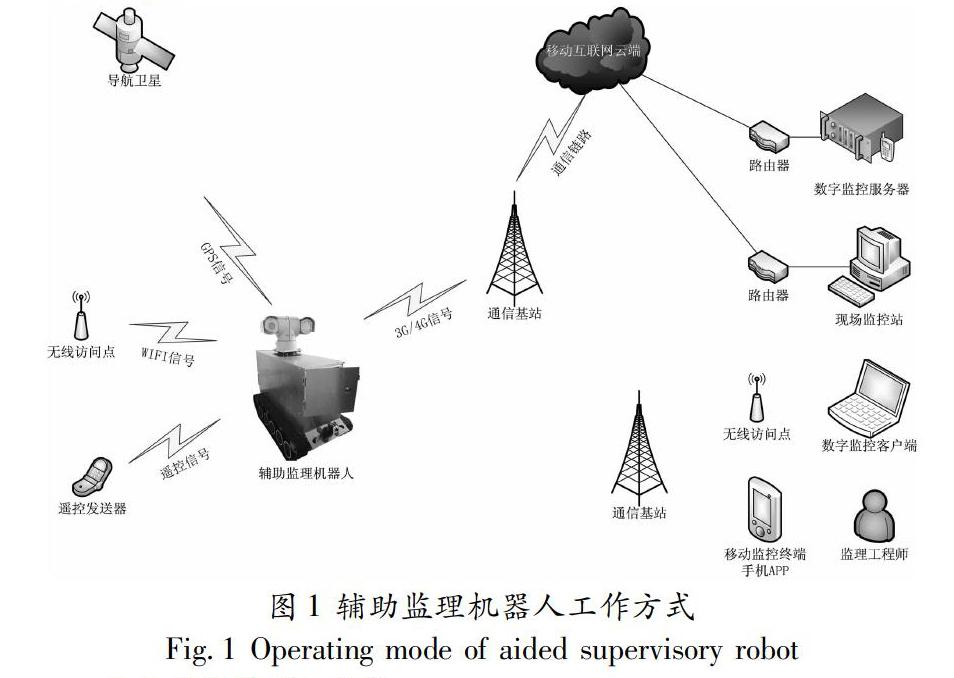
2.2 机器人主要工作方式
该机器人能够在监理工程师的遥控指挥下,进入施工现场指定位置,高清一体摄像机将现场视频信号采集到核心控制系统,核心控制系统处理视音频信号,存储在本地硬盘,并能通过3G/4G或者WIFI信号将实时监控视频或者历史录像通过移动互联网发送给移动终端。机器人带有GPS卫星定位功能,能够真实准确反映施工现场位置。监理工程师可通过手机APP或者电脑客户端,登录服务器接入端口,控制机器人监视镜头,实时观察施工现场情况,并能查询历史录像[3]。机器人内置不间断电源系统,能够在无外接电源前提下连续工作20小时以上,见图1。
2.3 数据处理及传输
在机器人的核心控制系统,主要集成视音频处理及镜头控制模块、本地存储及管理模块、通信处理模块以及多种通信接口。高清一体摄像机将1080P高清视频信号采集到核心控制系统,由核心控制系统进行解码处理,并按视频文件格式存储到本地硬盘备查。同时实时视频监控数据通过通信处理模块与外部通信。核心控制系统配置多种通信接口:(1)可供本地LCD监控用的本地通信接口;(2)3G/4G的移动通信接口;(3)WIFI无线网络接口;(4)GPS信号接口。数字监控信号可通过3G/4G和WIFI网络传输到移动互联网,上传至服务器,手机APP移动终端或者电脑客户端通过登录服务器接口,建立与辅助监理机器人的直接通信连接,获取实时视音频信号以及GPS位置信号,见图2。机器人可设置优先WIFI通道连接移动互联网,当不具备无线网络时,可自动切换至3G/4G网络,通过公用通信基站与移动互联网建立连接,保证实时信号的传输。
2.4 机器人动力系统
辅助监理机器人内部使用不间断电源系统。电源系统输入部分可接入交流220V市电,通过整流与稳压模块提高输出电源质量,同时为3块12V38AH的阀控式密封铅酸蓄电池充电。当外部交流电源失电后,可由蓄电池继续提供工作电源。电源系统主机正常工作时可输出标准交流220V及直流12V电压,为核心控制系统、高清一体摄像机以及履带电动机提供工作电源。
2.5 机器人移动及防护设计
考虑到施工现场环境的影响,采用履带式底盘可适应多种路面情况,包括泥泞、湿滑、碎石、爬坡等。一体化机身满足IP54防护等级,能够适应现场灰尘较大的情况,能在露天雨天条件下正常工作。另外在机身设置警示灯,起到安全防撞击作用。机器人总重达40千克,一般人不易搬动,另外有摄像头遮盖告警,起到防盗破坏作用。
3 应用情况
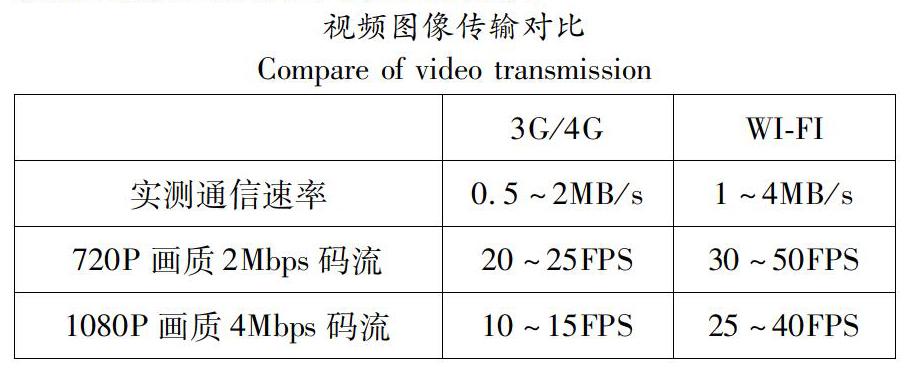
辅助监理机器人在实际建筑监理项目中运行良好,能够适应现场恶劣的粉尘环境,其宽范围电压输入可应对现场临时电源的低可靠性,多模式通信接入方式使机器人保持实时在线监控[4]。实际应用中,使用3G/4G网络接入与WIFI局域网(100M接口)接入对视频图像的传输清晰度和流畅性有一定影响,如下表。工程师可根据现场实际情况设定机器人的传输分辨率。未来5G通信网络普及之后,机器人视频传输及远程遥控将更稳定及清晰,实时性也会更好。
4 结语
本文设计的机器人各模组可快速集成,多模式通信接口能灵活接入移动互联网,为建筑监理行业提供一种灵活的辅助监理手段,既可大大减轻监理工程师的体力劳动,又能提高监理效率,丰富现场记录方式。本设计具有行业应用创新性,可快速推广应用。
参考文献:
[1]丁冬妮.“互联网+”模式下的建筑工地可视化监控管理[J].数字通信世界,2018,(6):212.
[2]马力.基于Android的智能小车远程控制与视频监控系统研究[D].西安:西安电子科技大学,2018.
[3]郭志涛,韩海净,孔江浩,等.基于Android移动终端的多功能视频监控系统设计[J].现代电子技术,2018,(16):9699.
[4]霍海锋,包尔恒,屠丹.辅助监理机器人[P].中国:ZL201920114886.0,20191025.
作者简介:霍海锋(1976—),男,广西藤县人,硕士,高级工程师,研究方向为系统集成及自动控制技术;包尔恒(1971—),男,甘肃天水人,硕士,高级工程师,研究方向为智能电源技术。
