一种基于卡尔曼滤波函数的消防员室内定位算法研究
2020-08-05赵学磊
赵学磊
(新疆消防救援总队,乌鲁木齐 830063)
1 消防员灭火救援中面临的危险
在城市化发展过程中,各类高层建筑、地下建筑逐渐增多,很多建筑在设计过程中追求个性化,导致建筑结构日趋多样,疏散通道长度增加,疏散路径更加复杂,建筑火灾危险性急速增大,同时这类建筑往往人员密集,一旦发生火灾将会对人民生命财产安全构成重大威胁。当消防员进入这样复杂的火场环境后,现场指挥人员仅能通过对讲机与其进行通信联络,对于消防员所处位置和基本环境情况不能通过有效的手段进行获取,当消防员遇到危险后不能组织人员进行精准施救,也不能正确引导其安全撤离火场,消防员自身安全得不到有效保障。近年来,全国消防队伍在灭火救援过程中牺牲人数已超300人,受伤人数达到数千人,全国各级消防部门都在积极探索利用消防员室内定位系统确保消防员的人身安全。
2 传统消防员室内定位算法存在的问题
传统消防员室内定位算法基本分为三点定位和惯导定位两种,本文重点讨论三点定位的方法,三点定位法首先要在建筑物内或建筑物周边设置若干定位基准信标点,持续向周围发送无线信号,定位模块在同时收到三个以上基准信标点的无线信号后,根据信号的RSSI 值测算出定位模块与基准信标点间的距离,并通过一定的算法进行修正,最后利用三组以上的距离数据计算出定位模块所在的位置。在复杂的火场环境里,RSSI 值非常容易受到火焰、烟气、高温和水渍的影响,往往出现较大的波动,造成定位精度偏差较大,直接影响到灭火救援指挥决策,难以确保消防员自身安全。
3 基于卡尔曼滤波函数的消防员室内定位算法实现
卡尔曼滤波函数具有最小无偏方差的特性,目前广泛应用于计算机图像处理、智能导航、传感器数据融合、机器控制等领域,本文主要利用卡尔曼滤波函数对数据进行统计估算,通过对一组带有误差的实际测量的RSSI值进行处理,从而得到所需要的定位参数的最佳估算值。
利用卡尔曼滤波函数进行处理的过程是:不断对测量值Y(k+1)进行更新,并利用Y(k+1)对待求状态向量X(k+1)进行估计,处理过程中会利用到噪声协方差矩阵Qk和观测噪声协方差矩阵Rk两个参数,通过对准确值和待求状态向量的观测值之间误差的计算和描述,不断消除误差对准确值的影响,最后估算出待求状态向量的最佳近似值。在不断的更新循环过程中,噪声协方差矩阵Qk和观测噪声协方差矩阵Rk设定了过程噪声和观测噪声值,当出现其值与实际测量误差所等效的过程噪声和观测噪声能够保持一致的情况时,则卡尔曼滤波函数所得到的参数估计值可以与准确值相等。
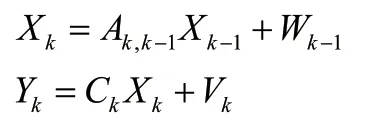
离散信号的状态方程和测量方程为:
滤波评估方程:

滤波增益方程:

预测协防差阵:

滤波协方差阵:

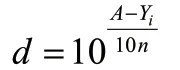
利用卡尔曼滤波函数对测量到的RSSI 值进行处理最终得到量测数据列为Y。

得到定位模块距基准信标点的距离:我们再根据多个基准信标点与定位模块之间的距离,在建筑物平面图中拟合出消防员大概的位置,为现场指挥的各级指挥员提供重要的辅助决策信息。
4 结束语
通过实际测试,利用卡尔曼滤波函数对传统消防员室内定位算法进行改进,能够大幅提升定位精准性,计算结果基本符合实际需求,能够成为保障消防员生命安全的重要数据支撑,能够为进一步提升灭火救援指挥效能发挥重要作用。