基于参考信号的TDOA 定位技术研究
2020-08-05高俊浩
高俊浩,郭 敏,陈 奎,屠 丹
(国家无线电监测中心检测中心,北京 100041)
0 引言
无线定位技术一直是通信领域的一个研究重点,常见的定位技术有TOA、TDOA、AOA 以及基于智能天线阵列的定位技术等。其中,TDOA定位技术以定位精度高、系统复杂度低等优点在很多监测系统中被采用。TDOA定位的核心算法之一就是计算时间差,常用的计算时间差的方法多以硬件为主,利用高精度的GPS 时钟模块对同步采样的数据进行互相关计算[1]。该方案硬件成本高,定位结果容易受到GPS 信号的强弱以及晶振的稳定性等影响。所以,本文研究了基于参考信号计算时间差的算法,采用该方式的定位可有效降低硬件设计的成本与难度。
1 TDOA 定位模型
1.1 双曲线模型
TDOA 定位方法中参与定位的设备至少需要3 台,本文设计的实验中使用了3台设备进行定位。TDOA 定位的双曲线模型[2]如图1所示,记待定位的发射源为D,对应坐标为(XD,YD)。记参与定位的三台设备为C1,C2,C3,对应的 坐 标 分别 为(XC1,XC1),(XC2,XC2),(XC3,XC3)。记D 到C1、C2与C3的距 离 分 别dD1、dD2、dD3。由两点距离公式可得式(1)、(2)、(3)。


记D 与C1、C2的距离差为D12,D 与C1、C3的距离差为D13,D 与C2、C3的距离差为D23。根据双曲线定义,可以得到一条以C1、C2为焦点,以D12为焦距的双曲线,如图1中虚线所示。同理可以得到以C1与C3、C2与C3为焦点的双曲线,分别如图1中点划线与实线所示。通过确定多条双曲线的交点,便可确定D 点的坐标。

图1 TDOA双曲线模型
1.2 算法模型
对于TDOA 的位置计算常用的算法有Fang 算法、Chan 算法以及泰勒级数展开,在文献[2]中对于每种算法进行了详细的公式推导与仿真分析。这三种算法各有优缺点:Fang 算法通过消元的方式得到特征方程的两个根,通常需要根据基站的实际覆盖半径与定位位置去剔除一个虚解,该算法通常用在基站与终端的公网定位当中;Chan 算法与Fang 算法相似,也需要剔除虚解,并且该算法对测量误差敏感,在建筑密集的城市间不能保证很好的定位精度;泰勒级数展开的算法主要是采用逐次迭代的方式完成定位,通过初值的选取,逐次迭代去逼近实际的位置,该方法定位在非视距的环境中也能保证相对较高的定位精度,试用场景也更广。
2 TDOA 定位分析
TDOA 算法的核心模块是时间差计算与位置计算,时间差的计算依赖于同步采样的数据,所以同步是时间差计算的核心,同步误差的大小将直接影响后续位置计算的精度。下面主要对时间差的计算方法进行介绍分析。
2.1 参考定位模型
采用参考信号进行定位的方法如图2所示。三台定位设备分别为C1、C2、C3,其中,S 为已知的参考信号,D 为需要定位的未知信号。一般采用硬件GPS 的定位模型是由图中实线连接的设备组成,只包括三台定位设备。定位流程是由定位设备直接对未知信号D 进行定位,该方式需要各定位设备具备高精度的时钟,通过获取GPS的时间完成指令同步,通过脉冲控制完成同步采样,对硬件要求较高。采用参考信号的定位模型是在原有定位模型的基础上添加参考源,如图2中虚线连接的S 信号。与采用硬件GPS 的定位方式相比,最直观的不同点是多了一个参考信号,但各定位设备的内部硬件设计更加简单。采用参考信号进行定位时,定位的发起信号可以采用系统的时间,即在指定的同一时刻开始进行信号的采集。采用此时间触发时首先需要对各定位设备的系统时间进行网络同步,同步的目的是将各定位设备的时间误差降低到最小,该误差在可以补偿的范围之内。然后根据定位触发信号完成对S 信号与D 信号的信息采集,最后通过两次时间差计算完成对未知信号D 的定位。参考信号的主要作用就是根据其与各定位设备的已知位置关系完成对系统误差的补偿。
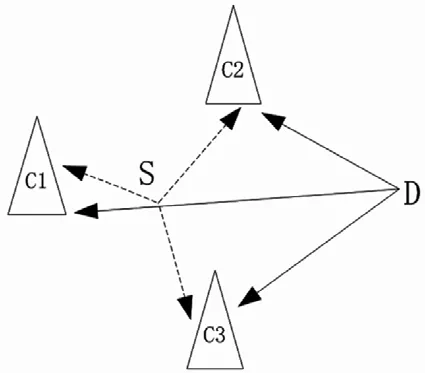
图2 定位模式
2.2 软件算法流程
TDOA 定位中对时间计算需要进行多次相关。时间计算的软件算法流程如图3所示,图中只给出了一组定位客户端对时间的计算关系。选取定位设备C1与C2进行射频数据的采集,每台客户端采集的数据包括两部分内容,一部分是参考信号S 的数据,另一部分是未知信号D 的数据。其中数据的采集是在同一射频通路下顺序完成的,即先获取S 信号,紧接着获取D 信号,然后将两组数据分别存储处理。为了减小时间计算的误差需要对数据进行上采样,对C1与C2同步采集的S 数据进行相关计算可以得到C1与C2对参考信号S 的时间差,记为Δs12。结合Δs12,C1与C2通过对上采样的D 信号再次进行相关计算得到时间差,记为Δd12该时间差代表C1与C2对D 信号的到达时间差,至此完成了一组时间差的计算。同理可得到另两组到达时间差。

图3 软件计算流程
2.3 时间差关系
采样流程的时间关系如图4所示,整个时间的处理可以划分为两个阶段来分析。其中高幅值的正弦波代表第一阶段采集的S 信号,低幅值的正弦波代表第二阶段采集的D 信号。t0时刻触发采集信号指令,从图中可以看出三台定位设备对S 信号的采集并不一定是同步开始的。原因是由两部分引起的,一是S 到三台设备的距离不一定相同,二是三台设备的系统时间也并不一定相同。由于S 与各定位设备的实际距离已知,所以S 到各定位设备的到达时间差为已知,此处仍以C1与C2为例来说明,则该时间差记为Δat12。在2.2小节中通过第一次相关计算可以得到Δst12,该时间差中包含有不确定的系统误差,记系统误差为Δmt12。所以将绝对时间差Δat12与相关时间差Δst12相对比可以得到系统误差。

图4 采样时间关系
三台定位设备在第一阶段通过互相组合计算可以得到3个时间差,通过互相比较,可以得到最大的滞后时间点t1,时间点t1即D 信号的开始同步采集时刻,根据计算需求确定截止采样时刻t2,时间点t1与t2截取的数据这样即为同步采样的D 信号。由2.2节中所描述,对两路D 信号进行相关计算可以得到到达时间差Δdt12。该时间差中也包含了第一阶段的Δat12与系统误差Δmt12,所以D 到定位设备C1与C2的实际时间差为公式(4)。其中正号与负号分别代表超前与滞后,具体的符号值需要根据实际的情况确定。

3 定位测试
依据(4)式的时间差便可得到距离差,依据距离差进行位置计算。利用实际部署的设备进行定位测试,本次实验设置坐标原点为万寿路地铁站,选取部署在顺义机场、中加大厦以及通州北关的三台设备进行定位。定位目标为中央电视塔发射的普通调频广播信号,定位效果如图5所示。图中星形所代表的位置为定位目标点,三条曲线相交的位置即为实际的定位点。其中图(b)为图(a)放大后的图片,从图中可以看到实际的定位点距离目标点存在着误差,该误差在可接受的范围之内。
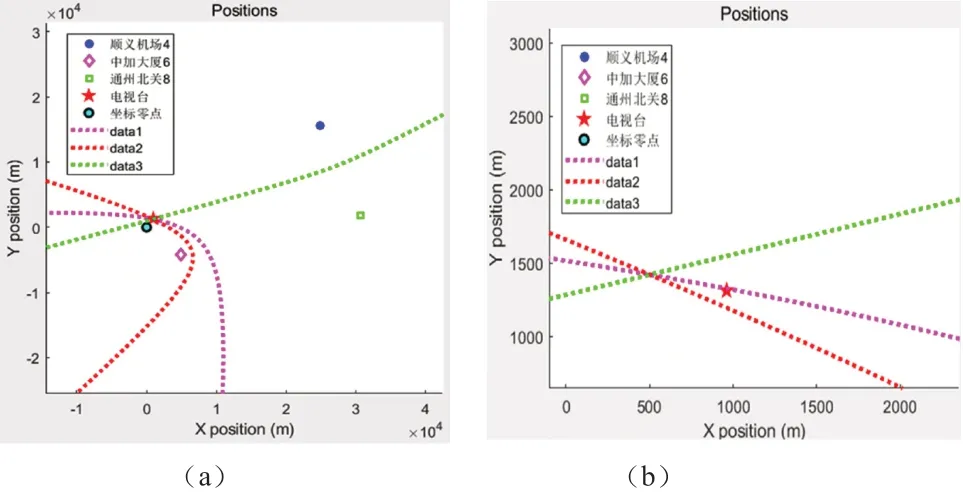
图5 TDOA定位
图6描述的是不同信噪比对定位精度的影响。横轴代表信噪比,纵轴代表定位误差。其中data1代表三台定位设备的信噪比同时改变时其定位误差的变化规律,可以看到当信噪比小于3 dB 的时候,定位误差明显增加,在情况较差的时候双曲线无法完成交汇,定位结果也不再具有较大的参考价值。当信噪比在3 dB 到10 dB 之间的时候,双曲线不能很好的汇聚到一个相对集中的位置,交汇的是一个大概的范围,定位误差在一定的范围内波动。当信噪比大于10 dB 后,定位误差在一个相对稳定的范围内。data2代表其中一台定位设备的信噪比一直大于10 dB、另两台定位设备信噪比同时改变时定位误差的变化规律。data3代表两台定位设备信噪比固定,其中一台变化的情形。从图6中曲线可以看出,data2与data3的变化规律与data1基本一致。说明在TDOA 定位的时候,所有参与定位的设备采集的信号都应该有较高信噪比,否则会有较大的误差。

图6 定位误差
TDOA 定位的核心是时间同步,同步误差会带来定位误差,而影响同步的因素主要来自两个方面:一是系统误差,硬件与软件都会带来系统误差,并且该误差不可避免,只能考虑将系统误差的影响降到最低。在实验的数据采集阶段,参考信号与未知信号的采集在同一射频通路中完成,所以在频率切换与配置的时候会引入不确定的时间误差。二是实际应用场景中电磁波的非直射传播带来的误差[3]。在城市的环境中,发射点与接收点之间电磁波多以非直射传播为主,由于多径带来的时延扩展以及衰落会影响相关估计,造成时间计算的误差。本文实验中关于时间的计算均假设信号直射传播,并且进行了多次互相关计算,也增加了定位的误差。
4 结束语
本文采用参考信号计算时间差的方法进行了TDOA定位,通过对参考信号的时间计算可有效补偿系统误差与完成同步采样。最后通过实际测试验证了该算法的可行性,同时对不同信噪比的情况进行了定性分析。该定位方式可有效降低硬件设计的成本与难度,并取得较好的定位效果。同时,本文的实验中也存在一些不足,从实际的定位效果看,依旧存在明显的误差,实验中没有考虑信号非直射传播的因素,在今后的工作中需要对该定位误差继续进行研究。