基于AEC 架构的车载两轴稳定平台方案
2020-08-05赵春标
左 鹏,赵春标
(1.中央军委装备发展部军事代表局驻南京军区第一军事代表室,南京 210000;2.南京熊猫汉达科技有限公司,南京 210000)
0 引言
车载两轴稳定平台因追求高精度的控制指向,通过选择高精度的光纤惯导、提高编码器精度等途径降低了传感器的漂移,伺服控制系统的控制性能更多的取决于产品的传感器精度,为了提高产品的通用性,同时适应于车站动中通平台转速慢、惯性大等特点,提出了快速圆锥扫描算法,加快编码器漂移修复的算法。提高稳定平台系统指向精度。
1 天线基于车载惯导的控制模式
经过对跑车试验数据的分析与仿真,结合卫通天线的伺服控制机理与目标跟踪算法,初步定位为机载惯导的数据误差或数据传输的延时影响了天线的指向精度。下面进行具体分析:
卫通天线系统自检结束后,依据综合信息平台的卫星信息及当地经纬度计算出卫通天线理论俯仰角、理论方位角以及理论极化角。
同时稳定平台依赖信息惯导信息解算天线的稳定平台,惯导安装在载体上,天线初始化后与惯导航向一致。其中定义余弦矩阵,上标b,下标g,为地理坐标系转到其他坐标系的矩阵,反之则是其他坐标系转到地理坐标系的矩阵,两个矩阵互逆。Cgb为载体惯导欧拉角余弦矩阵;Aga为天线理论角度余弦矩阵;Egb为载体惯导与天线安装误差角度余弦矩阵;Dba为载体坐标系下方位俯仰极化角需要旋转的余弦矩阵,即为待求的矩阵。载体坐标系旋转到天线坐标系,余弦矩阵描述如下:

如果考虑到载体与天线的安装误差,则

最后得到载体坐标系下相对方位Ab,相对俯仰Pb和相对极化Rb。其中Egb矩阵中的误差角度,为天线的方位、侧倾和纵倾角度减去惯导的航向、横滚和俯仰角度。

因此,惯导数据的不精确、编码器的精度以及传动回差,都将影响天线的指向。
2 基于快速收敛的的模型分析
天线伺服平台长时间运行期间,惯导的温度漂移、卫星轨道的定位误差等因素都会导致天线的指向精度出现一定的偏差,甚至会严重影响天线的使用。为了弥补这些因素带来的影响,本设计中拟结合天线的圆锥扫描自动跟踪算法来弥补惯导漂移,提高指向精度。
在圆锥扫描过程中,方位与俯仰的运动服从正余弦曲线规律,且二者相位差值为90°,将方位和俯仰走的轨迹在空间上合成,变成了一个完整的椭圆。
图1是天线圆锥扫描示意图,以天线方位和俯仰的指向误差为x 轴和y 轴,构造二维坐标系。设O 点是天线指向卫星的理论位置,此处指向误差为零。P 点是天线指向卫星的实际位置,即此处天线方位指向误差为m,俯仰指向误差为n。

图1 圆锥扫描示意图
当天线以P 点为椭圆圆心,方位扫描直径为2a,俯仰扫描直径为2b,A 点为起点,做逆时针方向的椭圆运动时,椭圆上的每个位置点都服从椭圆参数方程函数:

式中,θ 为椭圆角度参数,取值范围是0°≦θ ≦360°。
相关文献表明卫星信号强度G 与椭圆上每个点的角度参数θ 具有近似的正(余)弦函数关系。通过推导可以知道圆锥扫描过程中得到的信标理论上符合正(余)弦函数规律。实际上,天线低噪放电路、变频电路和信标处理单元在射频处理时会产生随机噪声,因此信标X(t)在时域上的表达式可以定义为:
X(t)=A+Bcos(ωt+φ)+z(t) (8)
式中,A 为信标的直流分量;B 为余弦函数的幅值;ω 为余弦函数的角频率;φ 为余弦函数的相位;z(t)为噪声信号。
实际应用中,噪声信号z(t)对信标的影响较大,严重干扰了相位值和幅度值在时域的分析计算,导致普通圆锥扫描跟踪的精度低、速度慢。本发明基于快速傅立叶变换(FFT)数字信号处理技术提取信标信号的频域特征,充分滤除了干扰信号,极大弥补了信标在时域处理时产生的误差和抖动缺陷。快速傅立叶变换(FFT)是离散傅立叶变换(DFT)的快速算法,它是根据离散傅立叶变换的奇、偶、虚、实等特性,对离散傅立叶变换的算法进行改进获得的。
FFT 计算时,假设采样频率为Fs,信号频率为F,采样点数为N,FFT 之后的结果就是一个为N 点的复数。如果原信号的峰值为A,那么FFT 计算结果的每个点(第一个点直流分量除外)的模值就是A 的N/2倍,每个点的相位就是在该频率下的信号的相位。
设FFT 计算后的有效点为m,则该点复数Y(m)可以表示为:
Y(m)=Re+Imi (9)
式中,Re 为FFT 计算后该点复数的实部;Im 为虚部。天线调整的相位值修正角度和幅度值计算公式分别为:

3 仿真及跟踪精度影响
天线控制平台研制内容主要包括以下几个模块:供电单元、伺服控制单元、伺服执行单元、姿态反馈单元、信标数字检波单元以及机械传动结构。其中供电单元提供整个平台的供电;伺服控制单元用于计算角度矩阵并输出控制信号;伺服执行单元对控制信号做功率放大处理并驱动电机按指令转动;姿态反馈单元收集惯性单元、水平仪、编码器的姿态信号作为闭环控制的反馈;误差产生往往因惯导输出欧拉角的零漂,编码器精度,数据转发的延迟。信标数字检波单元对射频信号进行模/数转换,将处理得到的数据传给伺服控制单元做信号跟踪;机械传动结构作为整个系统的骨架起着支撑平台机械运转和机电组合的重要作用。新型天线控制平台的系统组成与逻辑结构如图2所示。

图2 天线伺服平台架构
其中,惯导数据作为控制模型的输入,对控制平台的影响至关重要,同时信标修复算法的修复速度以及于惯导特性的修复匹配决定最终的指向精度。
姿态反馈单元用来采集载体与天线控制平台自身的姿态信息,共选取了MEMS 惯性单元、1024ppr 编码器,电机算送比1 ∶102结构组成。
MEMS 惯性单元决定沿用IMU16588-2BD 型号产品,该MEMS 惯性单元输出频率为1000Hz,输出三轴(航向、俯仰、横滚)角速率与角加速度,主要性能指标如下;
⊙角速率零点漂移:±1o/s
⊙角速率温度漂移:±0.8o/s
⊙角速率测量范围:±125o/s
⊙角加速度零点漂移:±20mg
⊙角加速度温度漂移:±18mg
⊙角加速度测量范围:±6g
为了减小体积,提高电机的稳定性,编码器与空心杯电机、减速器经常做成一体化电机。编码器选型时的指标主要有精度和分辨率,在高精度的伺服控制中,要求编码器的精度控制在0.05′以内,分辨率在1000ppr以上,F3056与DCX16S 选配的编码器精度均为0.5o,经过1000 的传动比之后为0.03′,分辨率为1024ppr,可以满足天线控制平台的使用。
在该推导结论的基础上,借助PID 算法模拟输出给执行单元。使用六自由度摇摆台模拟车体的航向、横滚、俯仰的变化以及三轴横向的线性加速度。试验下车体的姿态变化如图3–图6所示。

图3 摇摆台试验过程中姿态角度

图4 摇摆台试验过程中三轴侧向速度
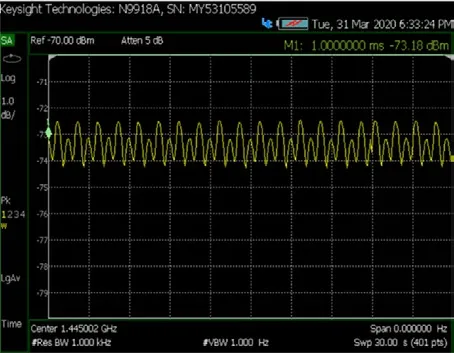
图5 未加入跟踪算法的稳定平台 信标信号的抖动

图6 加入修正算法的稳定平台 的信标信号抖动
图5为同样的摇摆条件下未加入跟踪算法的稳定平台信标信号的抖动,图6为加入修正算法的稳定平台的信标信号抖动。
引入信标快速修正的方案不仅极大地提高了卫通天线的指向精度,同时信号的抖动范围也显著降低,跟踪精度(均方根)从0.6dB 降低至0.25dB。因此,通过基于MEMS 惯导输出的原始数据进行姿态解算,结合快速傅立叶变换(FFT)数字信号处理技术提取信标信号的频域特征,可以充分滤除干扰信号,极大地弥补信标在时域处理时产生的误差和抖动缺陷。基于MEMS 惯导的两轴信标自动修正的方案是一种较为优化的方案。
4 结束语
在AEC 架构的车载两轴平台中,基于MEMS 惯导的信标快速修正模型可以有效修正弥补车载天线惯导漂移、转发延迟、编码器精度等产生的漂移,依据卫星信标信号对漂移进行实时修正,极大地提高了天线的指向精度,保证卫星天线指向,同时降低了产品的成本,具有较高的工程及理论价值。