全自动无人驾驶地铁功能分析及故障应对
2020-08-05许治威徐永能景顺利
许治威,徐永能,景顺利
(1.南京理工大学, 南京 210094;2.南京恩瑞特实业有限公司, 南京 211100)
随着城市轨道交通自动化技术的提高,以及为了应对日益增长的客运需求,全自动无人驾驶技术在轨道交通中的应用日益增多。国外对无人驾驶的研究起步较早,例如韩国、阿联酋等国家较早开通了无人驾驶线路。近几年,国内也广泛开展了无人驾驶的研究工作并得到了应用,目前北京、上海等城市的轨道交通全自动无人驾驶系统已正式投入使用。同时,国内很多城市的在建线路和规划线路都选择了全自动的无人驾驶系统方案,其正在逐渐成为城市轨道交通发展的趋势。国内外研究学者在全自动无人驾驶系统整体方案和功能场景方面做了较多的研究,但由于全自动无人驾驶地铁线路应用较少,针地铁运行中故障场景的应对及灾害场景的救援仍有待研究。同时,在自动化水平、灾害应对能力等方面,还存在相应的技术难点与挑战。
综上,本文结构如下:首先介绍城市轨道交通无人驾驶定义及特点;其次对无人驾驶系统的功能进行分析,特别针对相比于传统驾驶系统所特有的功能进行了描述;然后分析关键故障场景,并提出了相应的故障应对方案;最后则对全文进行总结。
1 无人驾驶定义及特点
城市轨道交通运行的自动化等级可以划分为GOA0-GOA4共5个等级,其中GOA2-GOA4实现了列车的自动驾驶。GOA2为有人驾驶的列车自动运行模式Semi-automatic Train Operation,STO),目前国内大多数城市的地铁采用的是自动化等级为GOA2的有人驾驶列车自动运行模式;GOA3为有人值守下的列车自动运行模式(Driverless Train Operation,DTO);GOA4为无人值守下的列车自动运行模式(Unattended Train Operation,UTO)。表1是各自动化等级下的城轨系统所具备的主要功能[1]。根据IEC62290的定义,DTO模式、UTO模式属于无人驾驶,本文讨论的对象为无人值守的列车自动运行模式。

表1 不同自动化等级所具备的功能
相比于传统的有人驾驶系统,全自动无人驾驶系统主要通过将司机的职能转移到车辆自身以及列车自动监控系统(Automatic Train Supervision,ATS),减少列车运行过程中的人员参与,提升列车自动化能力[2]。主要有以下几个特点:
1) 通过转移司机职能弱化了运营过程中人为因素的影响,从而减少人为原因导致的故障;同时由于故障应对方案需提前预设,系统的故障应对能力也有所提高,提升了地列车营的安全性。
2) 列车自动化水平大幅提升,使列车最小发车间隔缩短、准点率提高、舒适性增加,运营服务水平进一步提升。
3) 通过减少司机、站务人员降低运营成本。
2 系统功能分析
2.1 自动休眠唤醒
2.1.1列车唤醒
全自动无人驾驶系统中,列车的上线前检查与启动都由该系统自动完成。当列车投入运营前, ATS通过与综合监控系统(Integrated Supervisory Control System,ISCS)接口确认接触网是否带电。若检测到接触网不带电,则将接触网不带电警报发送给ATS;若检测到接触网带电,则通过出车计划表自动唤醒并由司机本地操作上电按钮、由行调或车辆调远程发送指令等3种方式对列车进行唤醒,如图1所示。
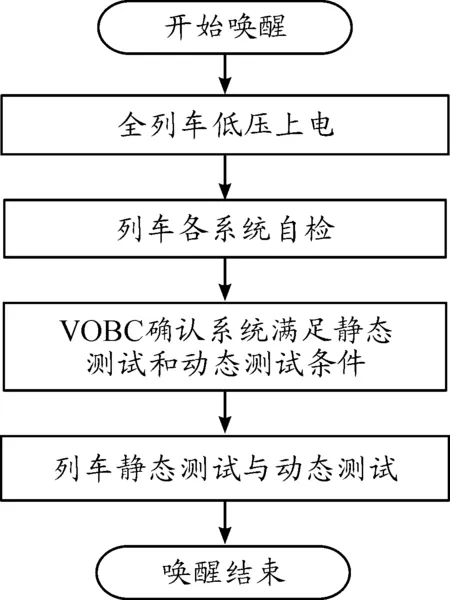
图1 列车自动唤醒流程框图
列车唤醒需要经过以下环节:
1) 全列车低压上电。车载控制器(Vehicle On-board Controller,VOBC)收到唤醒指令后,列车自动升弓接入高压供电网,以及接通列车低压供电电源。
2) 列车各系统自检。全列车上电后车载VOBC自动进行自检,当车辆任意子系统出现不允许出车的故障时,则认为车辆自检失败[3]。当自检全部通过时,车载VOBC向ISCS、ATS反馈自检信息,进入下一流程。
3) VOBC确认系统满足静态测试和动态测试条件。当完成各系统自检后,车载VOBC需要确认列车、区域控制器(Zone Controller,ZC)等是否达到静态测试和动态测试条件,当各项条件均满足时才能进入下一流程。
4) 列车静态测试与动态测试。车载VOBC向ZC申请列车静态测试和动态测试授权,获得授权后进行列车静态测试。当完成一端的列车静态测试后继续进行本端的动态测试,一端完成后自动换端对另一端进行列车静态测试和动态测试[4],两端车载VOBC均动态测试完成且测试通过。车载VOBC向行调、车辆调汇报唤醒成功总标记,列车唤醒成功进入全自动无人驾驶模式(Fully Automatic Train Operation Mode,FAM)待命工况。
当列车完成以上流程后可正式投入正线运营。
2.1.2列车休眠
列车休眠分为控制中心远程休眠和司机本地按压休眠按钮休眠两种方式,流程分别如下。
1) 控制中心远程休眠。首先车载VOBC向ATS实时发送列车当前状态,当列车满足以下条件时,ATS自动或人工向车载VOBC发送休眠请求指令。具体的条件包括:① 列车完成运营任务或者无任务;② 列车停在休眠唤醒停车窗;③ 列车处在非检修状态。车载VOBC收到ATS休眠请求指令后,自动撤销方向及司机室激活指令,同时车载VOBC向车辆列车控制及监控系统(Train Control and Monitor System,TCMS)发出休眠命令,车辆进行休眠。VOBC判断休眠是否成功,并将休眠结果及时反馈ATS,若休眠不成功则通过ATS进行报警提示,通知人工处理。
2) 司机按压休眠按钮。司机本地按压休眠按钮,车辆TCMS与车载VOBC采集到休眠信息后,完成自身休眠工作,之后车载VOBC判断休眠是否成功,将列车休眠状态上传到中心ATS,ATS显示休眠状态。若休眠不成功则进行报警提示,通知人工检修[5]。
2.2 列车正线运营
2.2.1列车进入正线
当列车唤醒成功收到ATS出库指令后,开始准备进入发车站台。列车出库前ATS系统会自动根据计划运行图为列车分配车次号,并根据时刻表排列进站进路[6]。车载VOBC监控列车按照列车出库规定驶入发车站台,列车运行至发车站后,ATS向列车发送正线服务工况指令,车载VOBC收到“正线服务”工况指令后列车开始进入正线服务。
2.2.2列车进站与离站
当列车进站前,车载VOBC自动判断列车满足以下条件后列车自动进站停车。
1) 移动授权满足进站停车条件;
2) 站台门关闭;
3) 紧急停车按钮未按下;
4) 列车未办理跳停作业。
若列车进站停车后欠标未到达停车窗,车载VOBC向ATS汇报欠标警报,列车自动启动牵引进行对标调整[7]。若列车冲标超过了停车窗,可分为两种情况,若冲标距离未超过预设阈值,车载VOBC向ATS汇报冲标警报,列车向后行驶进行对标调整;若冲标距离超过阈值,列车不再进行停站服务,进行越站作业驶入下一车站,同时向ATS汇报越站警报,并通过广播系统向乘客进行广播。
2.2.3区间内运行
列车从车站发车后,自动更新下一站的乘客信息系统信息,为下一站进站广播做准备。当列车越过出站信号机后,原则上经一次牵引、巡航、惰行和制动,运行到达下一站进站停车。
如果列车在区间内常规制动停车,应在行调ATS上报警,当列车重新收到移动授权后,自动启动列车并以FAM模式继续运行;如果列车因故在区内紧急制动停车后,应在行调ATS上报警;当导致紧急制动的原因恢复,进行紧急制动缓解,列车在获得移动授权后启动并自动运行到下一站。
当列车检测到轨行区存在影响列车运行安全的障碍物时,列车应根据障碍物距离列车的位置及列车的运行状态,控制列车常用制动或紧急制动停车,并在行调工作站显示报警;当列车接触或碰撞到轨行区的障碍物时,列车应紧急制动列车,并同时触发列车广播,在行调工作站显示报警。
2.2.4折返换端
折返分为站后折返和站前折返两种情况。
1) 站后折返时,列车在终端站台对标停稳后,自动打开车门不关闭,广播提醒乘客下车。列车规定停站时间到达后自动关闭车门和站台门,或客调通过CCTV远程清客确认后,远程关闭车门及站台门[8]。满足发车条件后,列车运行至折返线停车窗完成自动换端。列车完成换端后,满足进站条件,按列车正常进站停车过程运行至车站的出发站台。当停稳停准后切除牵引、施加保持制动、自动打开车门及站台门,并开始停站倒计时。
2) 站前折返时,列车对标停稳后自动打开车门;信号等待车门开到位后换端。换端过程中和换端后,车辆保持列车制动和车门打开状态,列车保持正线运行工况不变。当换端完成后,待停站时间结束和满足正常的发车条件时,列车自车站正常发车。
2.2.5列车退出正线服务
当列车完全进入终点站站台,车载VOBC收到“停止正线服务”指令后,向车辆发送停止正线服务指令,由车辆关闭照明、空调。车载VOBC接收到移动授权后,根据授权控制列车运行到库内停车,并自动进入清扫工况。列车完全进入库线停稳后自动删除车次号,列车停稳CCTV图像应推送到行调(场调)工作站。延时一段时间后自动或人工向该列车发送休眠指令。
3 无人驾驶条件下故障场景分析
3.1 车门故障
车门故障分为车门状态丢失、单扇车门故障、再关门控制等3种情况。
3.1.1车门状态丢失
车辆采集到车门关闭状态丢失时,根据列车所处位置采取相应的控制措施。
列车在区间或进站过程中,保证继续运行进站和精确停车。当列车在站台停稳时,若车门丢失状态仍然没有恢复,则切除牵引不再发车。
如果车门状态丢失时,列车正在出站且与站台区域有重叠,立即实施紧急制动,提示退出FAM模式,由综合站务人员上车恢复车门状态,确认乘客安全后重新按流程升级为FAM发车。如图2所示。
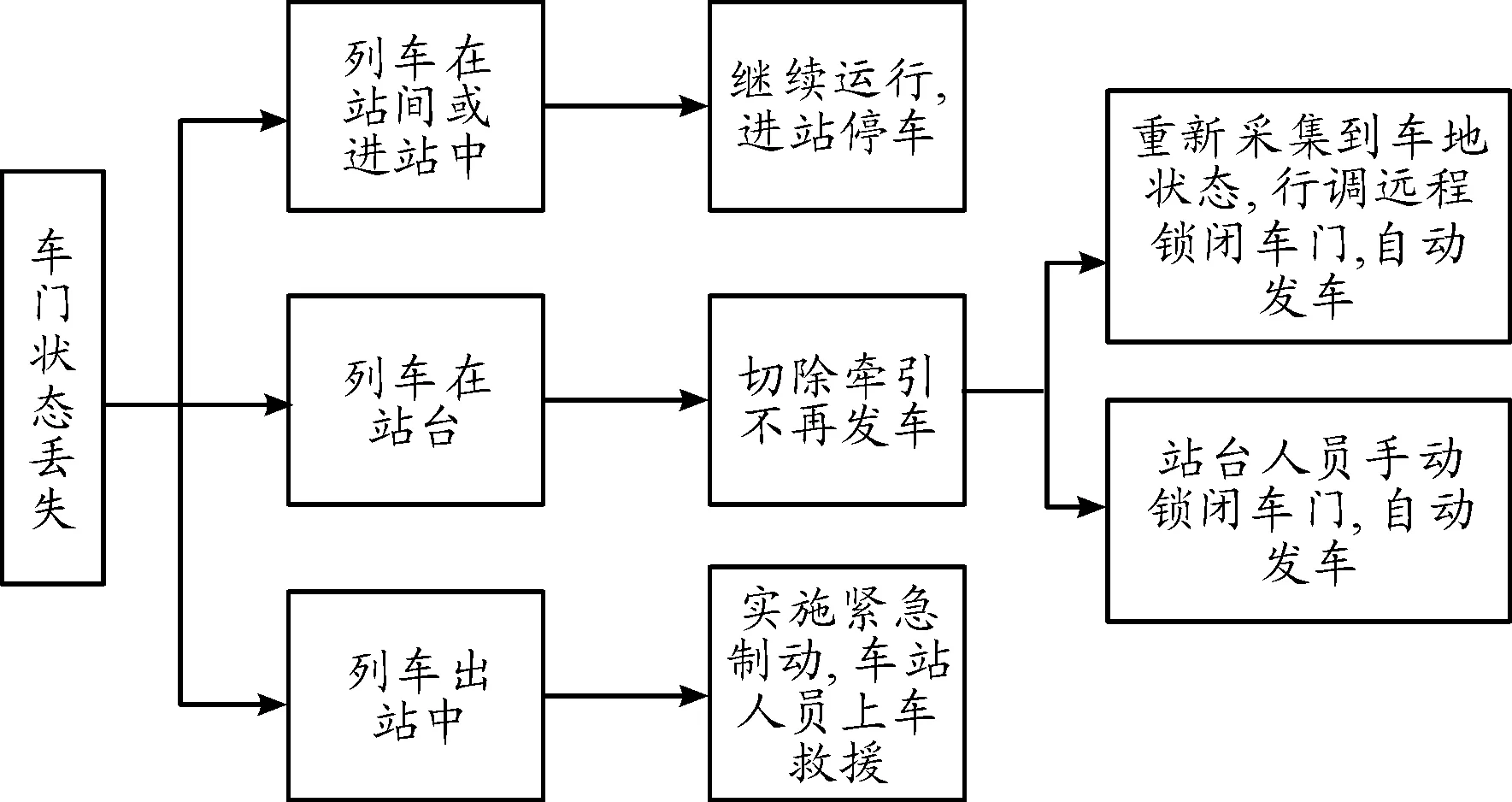
图2 车门状态丢失故障应对流程框图
3.1.2单扇门故障
单扇车门因故障无法打开时,车辆需向车辆调、乘客调、车站报警,由站务综合人员上车对故障车门进行隔离,列车运营至终点退出服务并将故障信息发送检修调[9]。同时,车辆点亮故障车门对应的红色指示灯,提示对应故障车门不打开的信息,并通过车载广播系统进行车门隔离故障广播。下一车站点亮故障车门对应站台门的故障指示灯,列车进站停稳后故障车门与对应屏蔽门均不打开。
3.1.3再关门控制
当遇到车门夹人夹物情况时,车辆开闭车门3次后仍未关闭,列车将通过车辆TCMS 给车载VOBC反馈进入防夹状态,保证车门及对应的站台门打开不关闭[10]。
车门的再次关闭可通过站务人员本地再关门控制,也可通过远程再关门控制。远程再关门控制时,行调通过ATS给车载VOBC发送再关门指令,车载VOBC发出再次关门指令[11]。
3.2 车载ATO/ATP故障
车载列车自动运行系统(Automatic Train Operation,ATO)和列车自动保护系统(Automatic Train Protection,ATP)设备均采用首尾双冗余配置。单系统故障时,列车正常运行,并向中央车辆调度台和行车调度台报警。当车载ATO/ATP两端均故障时,列车紧急制动停车。
车载ATO双系统均发生故障后,调度员尝试远程重启,重启成功后自动升级为FAM模式;如果远程重启失败则由调度员安排站务人员进入区间上车救援,工作人员上车后转为受控人工驾驶模式驾驶列车,人工护送回终点站后列车下线。
车载ATP双系统均发生故障后,调度员安排站务人员进入区间上车救援,工作人员切除车载ATP,采用紧急非限制人工驾驶模式驾驶列车至车站打开车门和站台门,清客后将列车下线[12]。
3.3 ATS设备故障
中央ATS系统及车站ATS服务器均为双机冗余配置。当发生单机故障时,自动切换到备机运行,保证不影响系统正常功能的使用。
当中央ATS主备系统均故障时,为了保证列车正常运行,中央行车调度员应通知车站综合业务人员就近上车。运营控制将自动转移到位于设备集中站的本地ATS,此时的列车进路由车站级ATS控制,列车仍可按FAM模式继续运行。如图3所示。
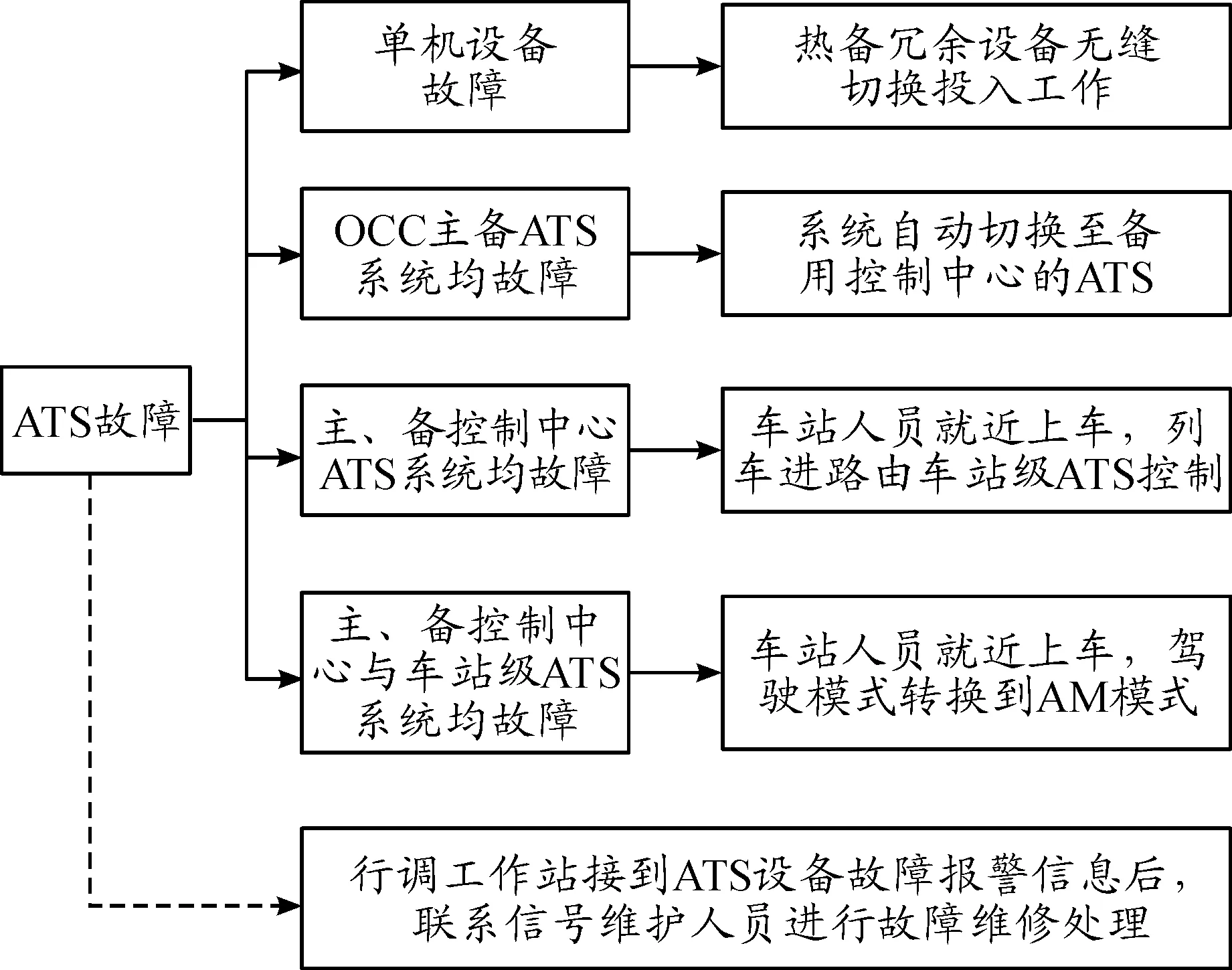
图3 ATS设备故障应对方案框图
中央ATS主备系统均故障,且车站级ATS设备也故障时,计算机联锁能继续给列车分配进路,区域控制器设备能够给列车分配移动授权。车载VOBC收到ATS故障信息后,列车正常运行,中央行车调度员通知车站综合业务人员就近上车,此时的列车进路由车站联锁设备控制。行调工作站接到ATS设备故障报警信息后,联系信号维护人员进行故障维修处理。
3.4 区域控制器设备故障
区域控制器采用安全可靠的冗余架构,单系统故障时,系统将自动切换到另一系运行,不影响系统功能。
当区域控制器完全故障时,控制区域中的所有列车紧急制动,降级为非基于通信的列车自动控制系统(Communication Based Train Control System,CBTC)列车。人工确认安全后,列车自动运行至下一站台停车,站务人员上车后,将列车降级到点式等级的列车自动驾驶模式或受控人工驾驶模式或限制人工驾驶模式运行,信号系统提供点式ATP/ATO功能,当列车行至ZC工作正常的区域并与其建立有效连接后,可重新升级到全自动控制等级。
4 结论
本文针对无人驾驶地铁线路应用较少,故障应对研究缺乏的现状,对无人驾驶地铁实际日常运营中的全流程功能及主要故障应对方案进行了探讨。目前,无人驾驶在我国还处在发展初期,在系统自动化水平、安全性、灾害应急能力等方面还需要进一步的研究。
