交流异步电机平稳启动限幅反馈优化仿真
2020-08-05张小石
张小石
(重庆建设工业(集团)有限责任公司, 重庆 400054)
我国在异步电机产业的国产化水平已经有了质的突破,国产异步电机的市场份额也在逐步提升,但是和国外欧美品牌在技术上相比,还是有一定距离。异步电动机以其优良的性能及无需维护的特点,在各行各业中得到广泛的应用。然而由于其起动时要产生较大冲击电流(一般为额定电流的5~8倍),同时由于起动应力较大,使负载设备的使用寿命降低,影响设备的正常工作。因此,研究电机的平稳无冲击地起动有着重要的意义。在前人研究3/2坐标变换的基础上,本文的创新在于磁链控制磁链调节器、转速控制转速调节器和转矩调节器的双闭环反馈限幅控制的方案,能够控制电机平稳启动,进而控制传动负载。通过电机平稳启动中转速、转矩、磁链调节器的参数匹配设计来研究调节器限幅反馈优化,为交流异步电机平稳启动提供了一些理论依据和改进方向[1-7]。
1 交流异步电机平稳启动系统原理的建立
交流异步电机平稳启动原理如图1所示,因为定子、转子互感是转子位置的函数,转子旋转时,这些互感是时变的,使分析计算不变,解决的办法就是坐标变换,由三相电流iabc经坐标变换得ist、ism。
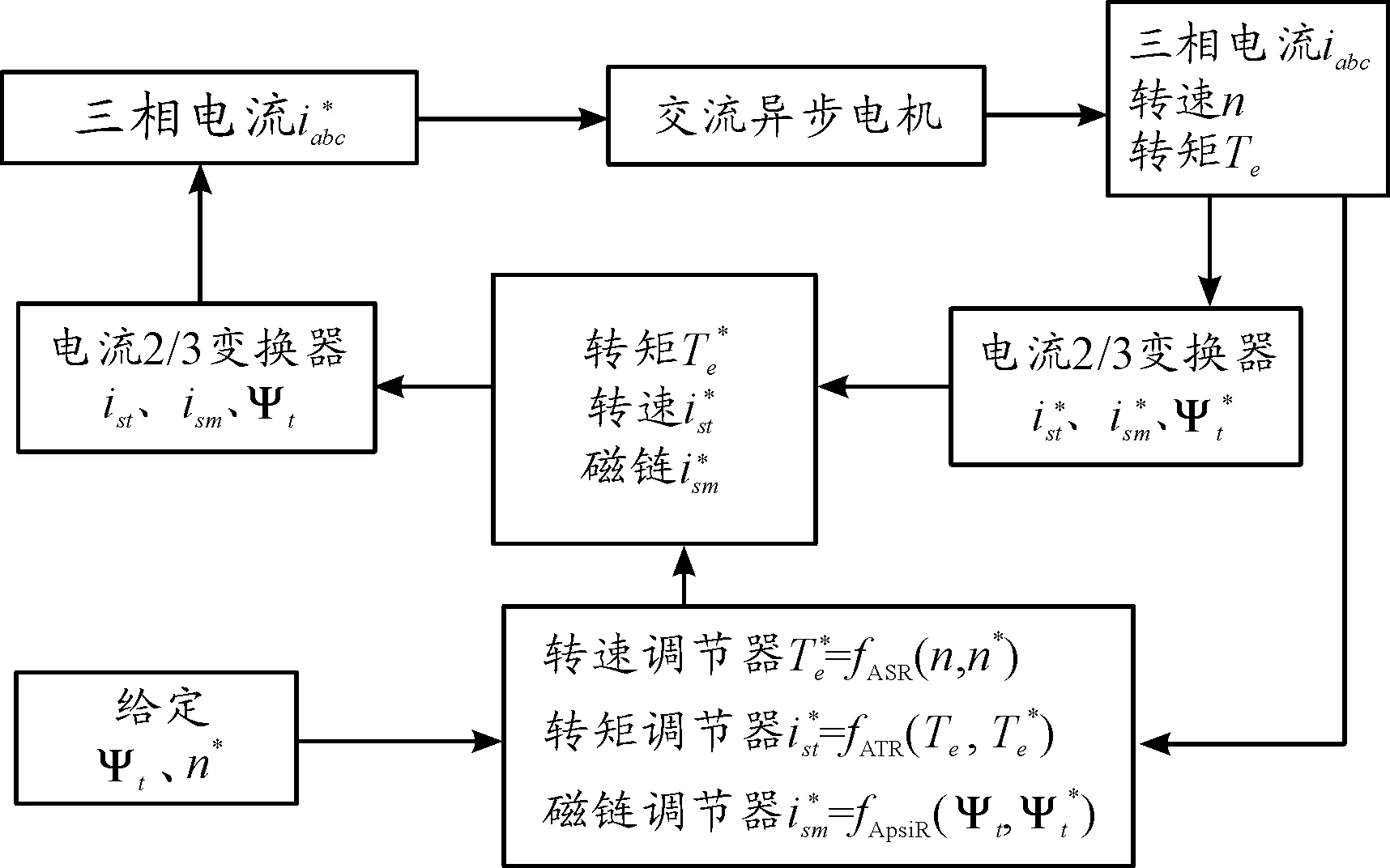
图1 交流异步电机平稳启动系统原理框图
(1)
(2)
由转速调节器得T*e
(3)
(4)
(5)
(6)
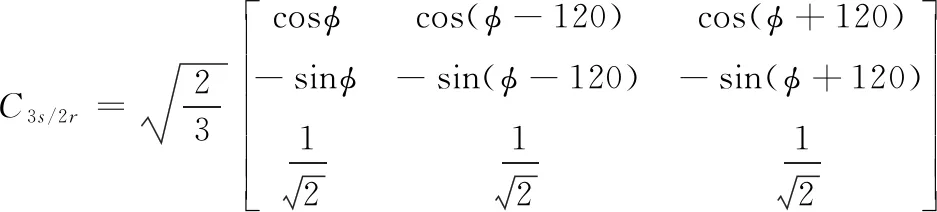
经2/3坐标反变换得
(7)
(7)
2 建模仿真
2.1 交流异步电机平稳启动模型


图2 带转矩内环的转速、磁链闭环控制矢量图

图3 3/2坐标变换模块矢量图
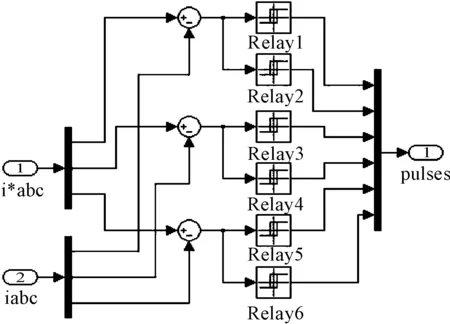
图4 脉冲产生模块矢量图
2.2 仿真参数的设定
在原理图中,ASR转速调节器内部结构为图5、图6、图7和表1所示,电机的启动仿真参数如图8和表2所示,ATR转矩调节器、ApsiR磁链调制器的参数设定与ASR转速调节器一样。
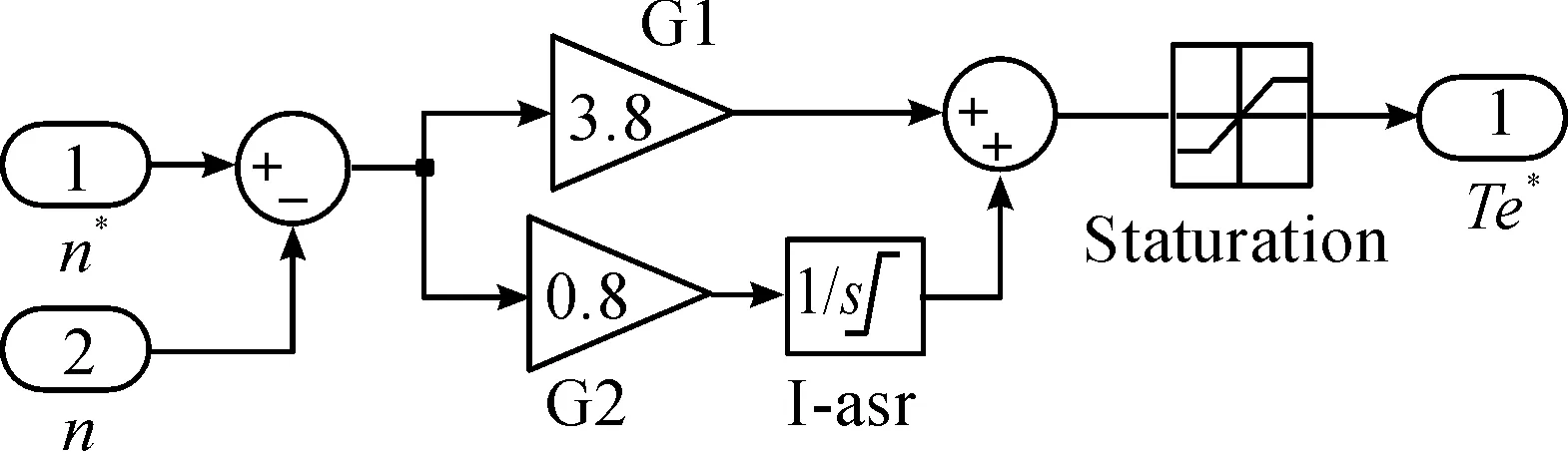
图5 转速调节器内部结构

图6 转速调节器输出限幅
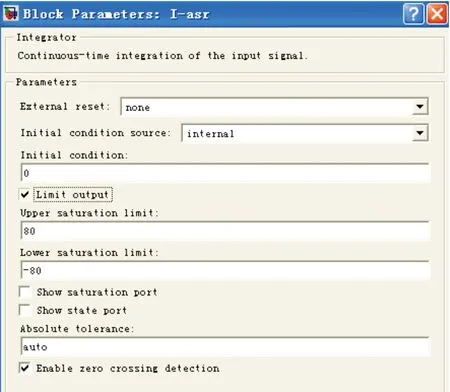
图7 转速积分器限幅
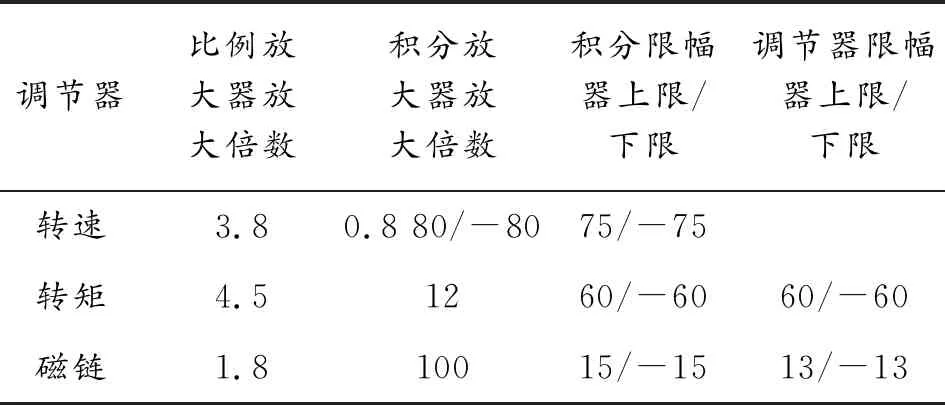
表1 调节器参数
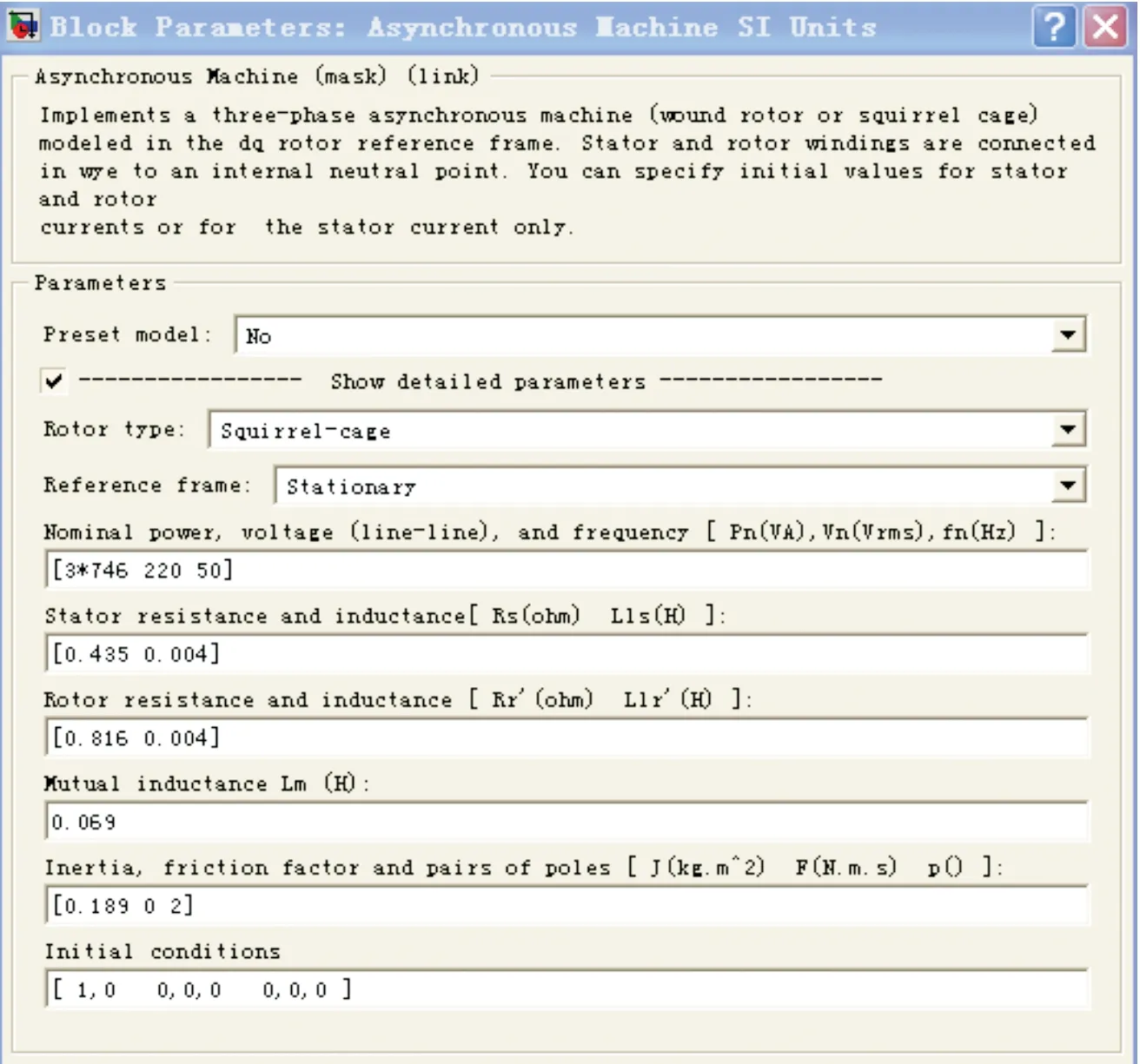
图8 电机启动参数
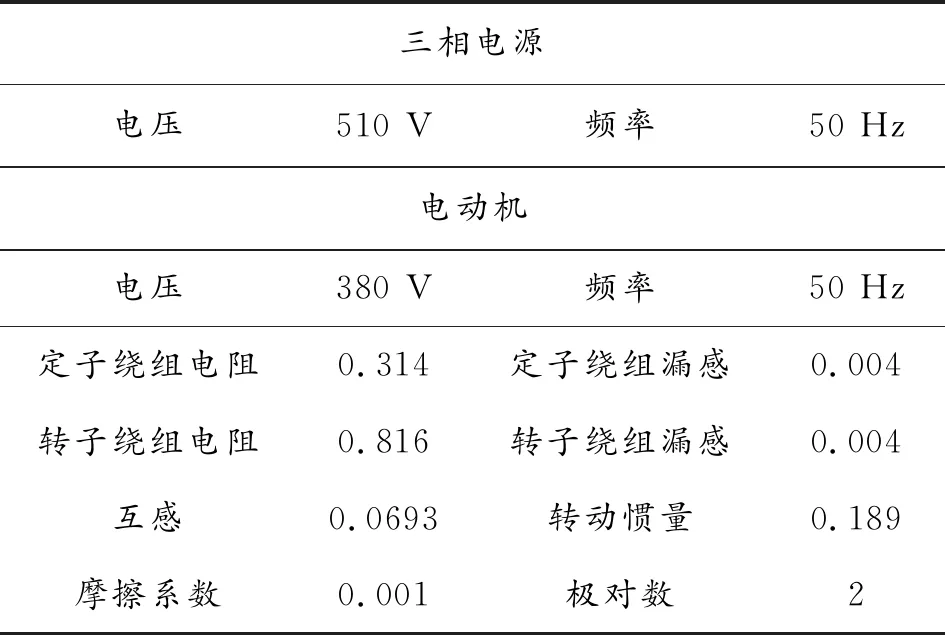
表2 电机启动仿真参数
2.3 仿真模型的建立
在Simulink中建立了无反馈的三相交流电机模型,该模型由直流电源DC模块、逆变器universal bridge模块、调制器PWM generator模块、三相电机模块、以及测量模块组成[10-12]。输入转矩TL为阶跃step函数,具体如图9所示。
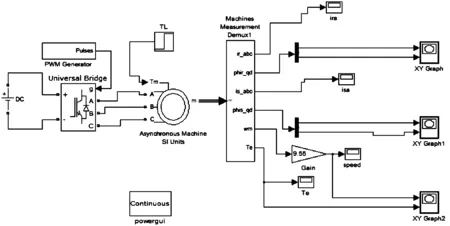
图9 无反馈的电机启动带负载运行Simulink模型示意图
在Simulink中建立了有反馈的三相交流电机模型,该模型由直流电源DC模块、逆变器universal bridge模块、ASR转速调节器、ATR转矩调节器、ApsiR磁链调制器、PWM generator模块、三相电机模块、以及测量模块组成。输入转矩TL为阶跃step函数,具体如图10所示。
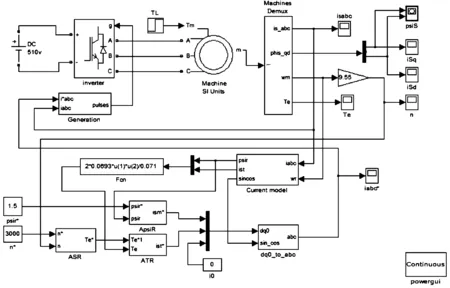
图10 带磁链、转矩反馈的电机启动带负载运行Simulink模型示意图
3 动态仿真分析
图11、图12是无反馈的电机启动的定子转子的三相电流曲线,在电机启动是电流的曲线的包络是上下振荡的,幅值80~100A的范围内变化,幅值变化大,限幅控制效果差;图13、图14是带磁链、转矩反馈闭环控制的电机启动的定子转子的三相电流曲线的包络幅值在60 A的数值整齐的变化,幅值一致,能够说明磁链、转速限幅控制性能的优越性。
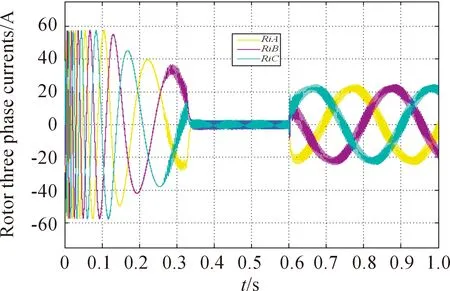
图14 有反馈转子的三相电流曲线

图13 有反馈定子的三相电流曲线
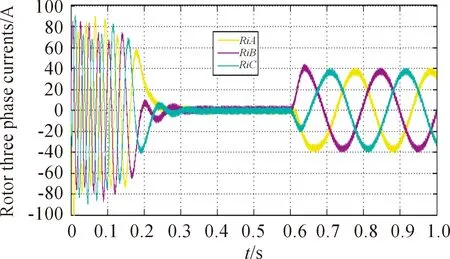
图12 无反馈转子的三相电流曲线
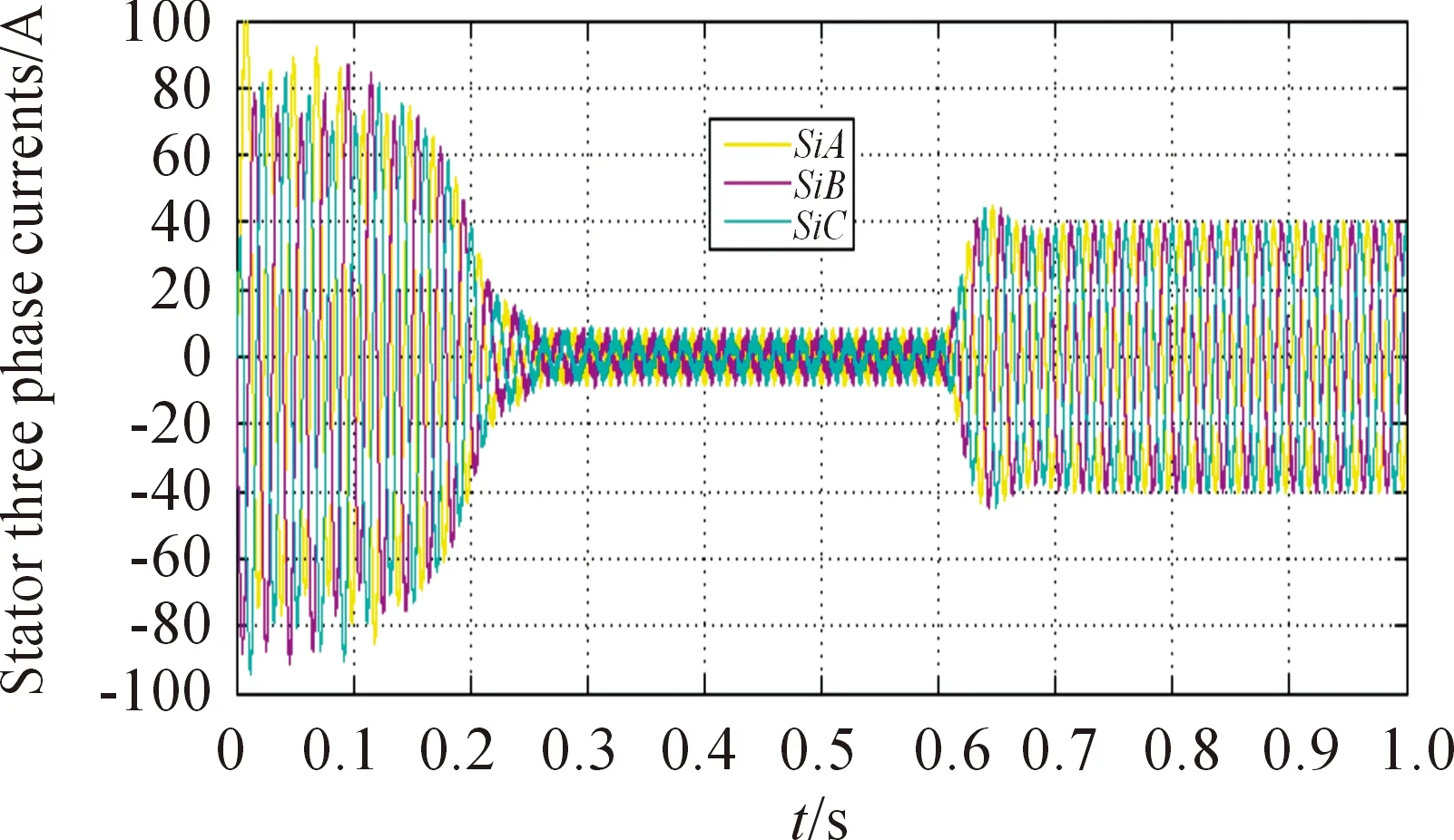
图11 无反馈定子的三相电流曲线
图15、图16是在无反馈的情况下,通过仿真可以看出直流电机启动过程中的定子的磁链轨迹曲线有许多毛边,这是启动过程中,对电机的磁链、转矩没有进行限幅反馈控制造成的。造成的后果是电机的转速、力矩不能平稳启动。图17、图18在有反馈的情况下,通过仿真可以看出直流电机启动过程中的定子、转子的磁链轨迹曲线比较规整[13-15]。
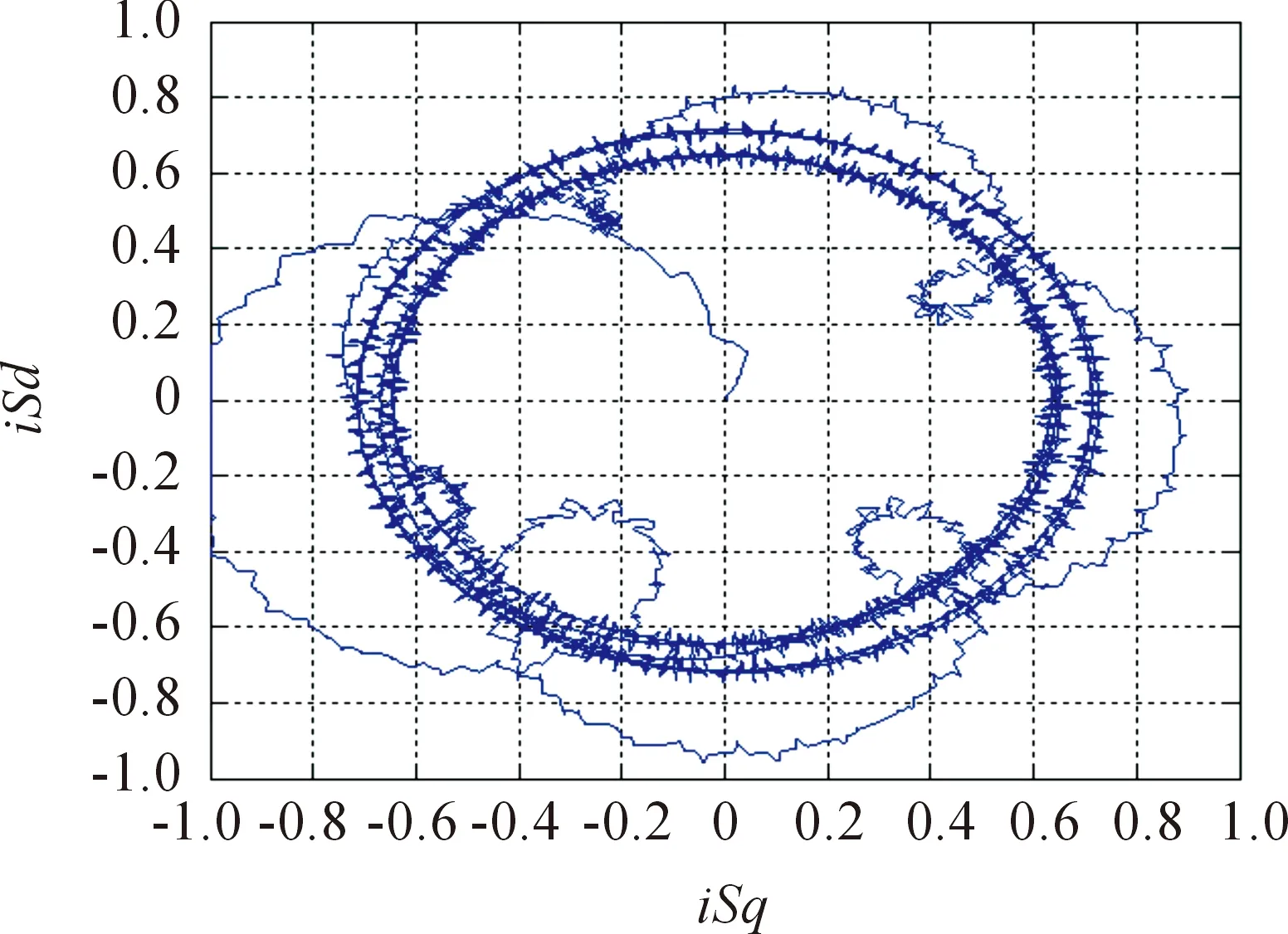
图15 无反馈定子的磁链轨迹曲线
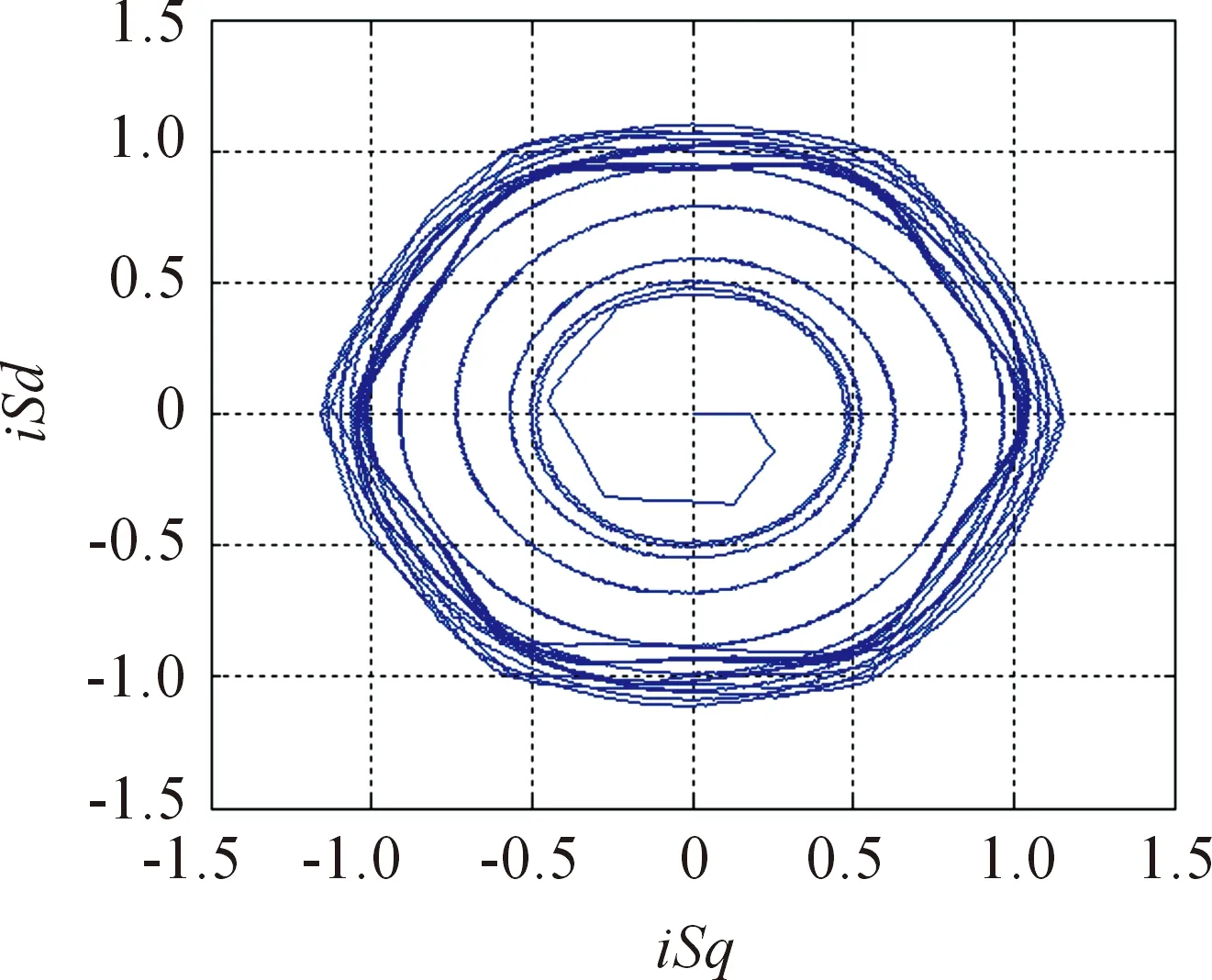
图16 有反馈定子的磁链轨迹曲线
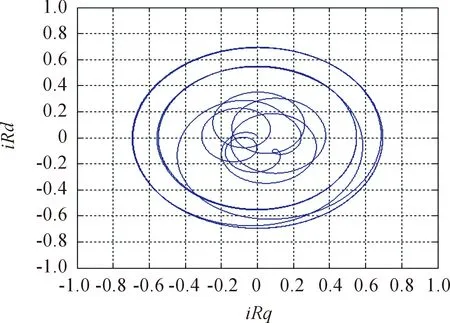
图17 无反馈转子的磁链轨迹曲线
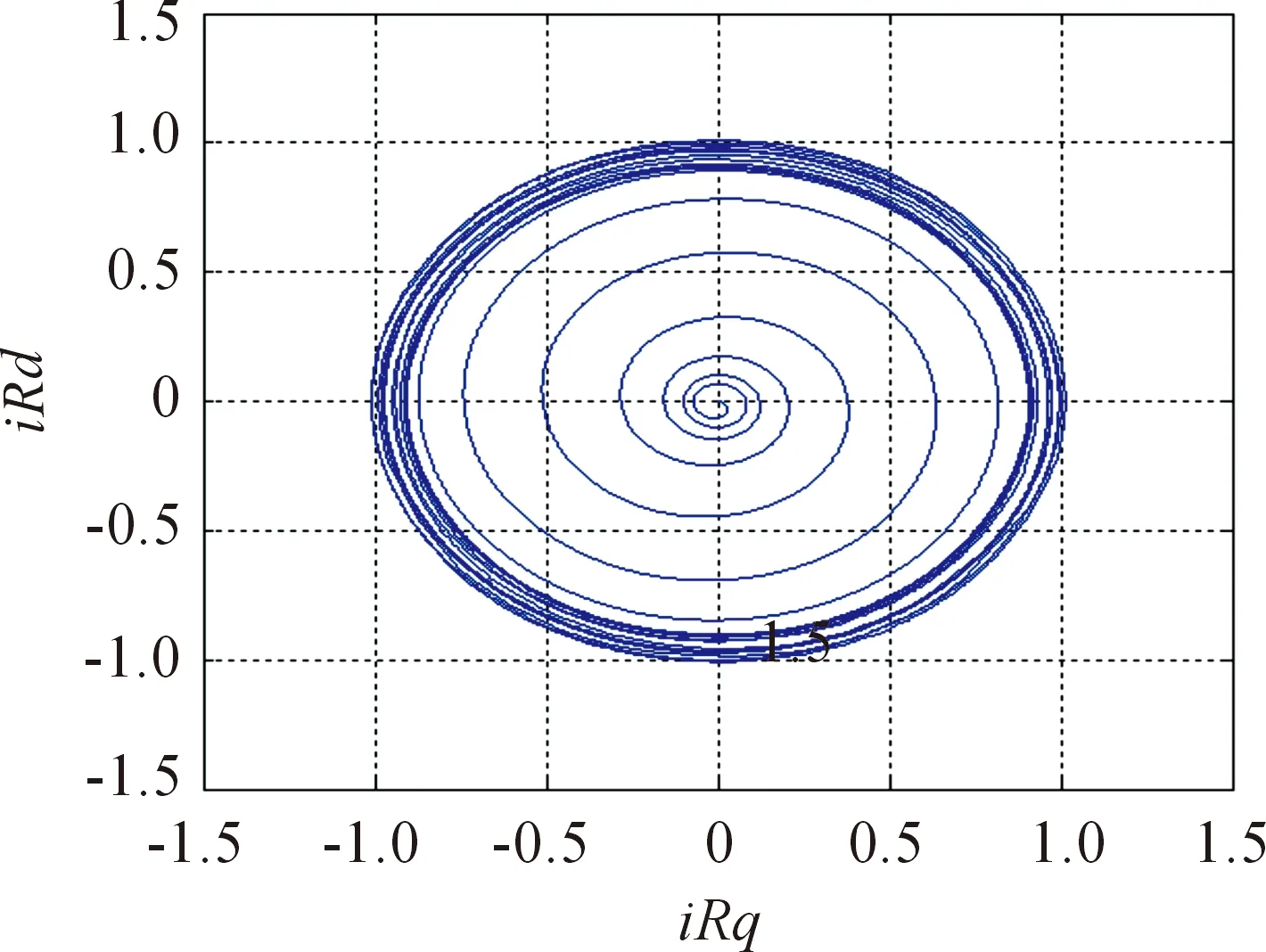
图18 有反馈转子的磁链轨迹曲线
电机在0.3 s后,达到预定的转速3 100 r/min。由于在0.6 s加了60 N·m的转矩,电机的输出功率一定,所以在0.6 s后电机的转速降低到2 800 r/min。转速曲线A在达到预定转速3 100 r/min和降到额定转速2 800 r/min时波动的阻尼比与无反馈曲线B相比降低了约60.3%,说明电机的转速稳定性得到改良,曲线如图19所示。

图19 电机的转速曲线
电机在0.3 s后达到预定转速3 100 r/min,没有施加转矩,所以此时的转矩曲线为0 r/min;在0.6 s加了60 r/min的转矩,转矩曲线也有相应的变化。转矩曲线在电机启动后转矩0 r/min和施加负载转矩60 r/min时曲线A波动的阻尼比与无反馈曲线B的比小了87.9%,说明电机的转矩稳定性得到改良,其次就是通过转矩曲线可以看出电机的启动比较平稳。曲线A的阻尼比为0.96,曲线B的阻尼比为0.63;曲线A的超调量为5%,曲线B的超调量为1.6%。无磁链、转矩反馈时,电机的启动曲线呈衰减的正弦曲线,说明无反馈时电机启动不稳定。转矩曲线如图20所示。
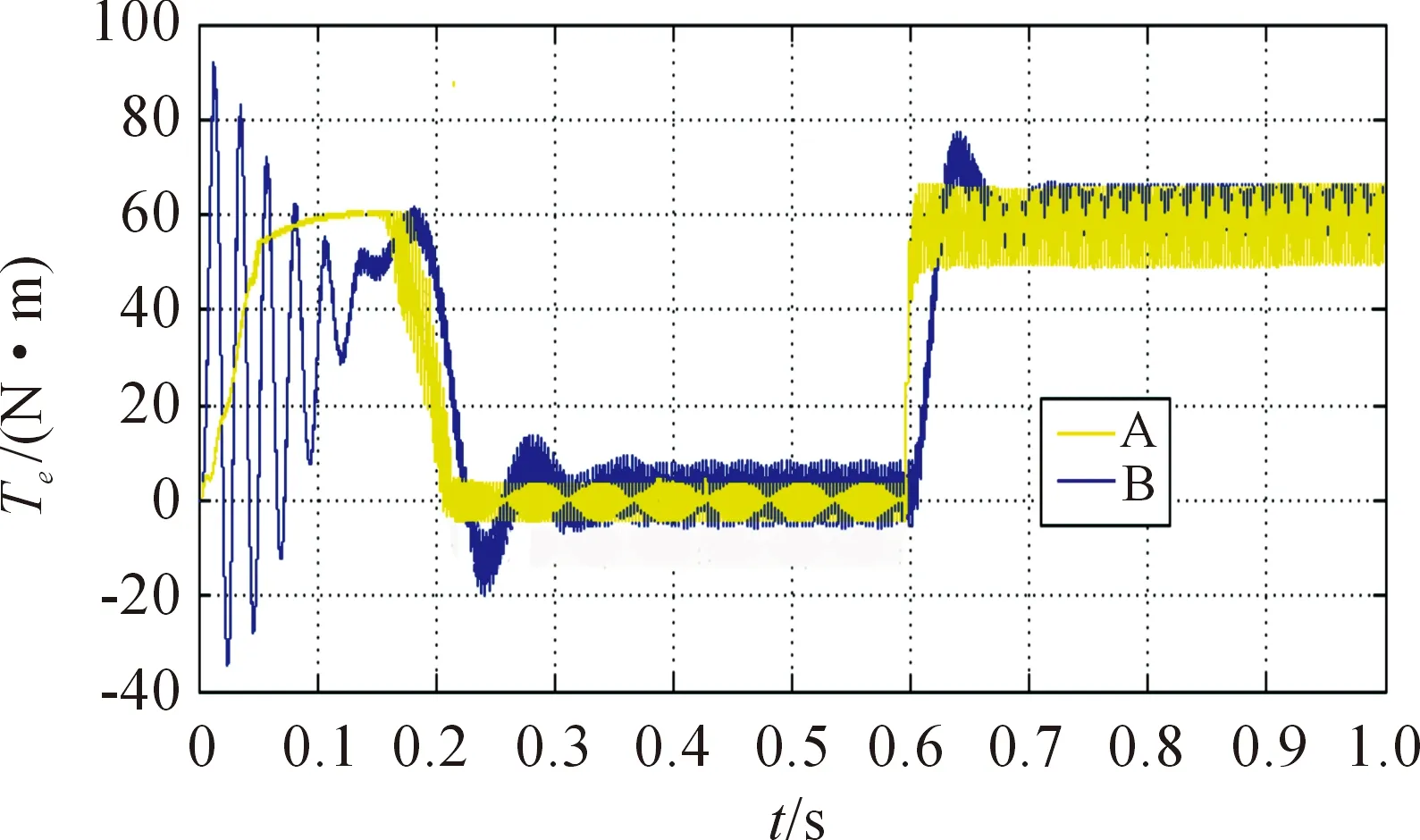
图20 电机的转矩曲线
为了说明本研究结果的可行性,采用了可信性的比较标准阻尼比和超调量M,图19中曲线A的阻尼比为0.95,曲线B的阻尼比为0.13,阻尼比越趋近于1,系统越稳定;曲线A的超调量为25%,曲线B的超调量为3.3%,超调量越小,系统越稳定,可见对转速、转矩、磁链的限幅优化是有效可行的。

表3 电机转速参数优化前后
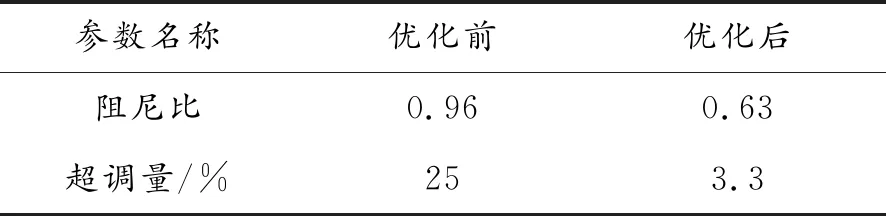
表4 电机转矩参数优化前后
4 结论
运用Matlab/Simulink软件,建立带磁链、转矩反馈的电机启动控制仿真模型,通过数值仿真求解,并和无反馈的电机启动方案进行比较,电机转速的阻尼比相对减小60.3%和超调量M相对减小76.1%,电机转矩的阻尼比相对减小87.9%和超调量M相对减小88.2%,对电机启动过程的振动抑制比较明显,对于电机平稳启动、转速平稳过渡是有效和可行的。
